目标筛选方法和装置与流程
本技术涉及智能驾驶,特别是涉及一种目标筛选方法和装置。
背景技术:
1、随着智能驾驶技术的不断发展,智能驾驶车辆可以在多种场景实现较高等级的自动驾驶。
2、在对智能驾驶车辆的感知能力要求较高的场景下,可以通过路侧感知技术提高智能驾驶车辆的感知能力;例如,交叉路口场景。但是,由于交叉路口的工况较为复杂,路口区域的目标较多,为了减少智能网联车辆对于无效目标的接收,可以对路口中的危险目标进行筛选,以过滤不相关的目标。
3、然而,相关技术中对路口中危险目标的筛选方式存在准确性不高的问题。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种目标筛选方法和装置,能够提高对路口中危险目标筛选的准确性。
2、第一方面,本技术提供了一种目标筛选方法,包括:
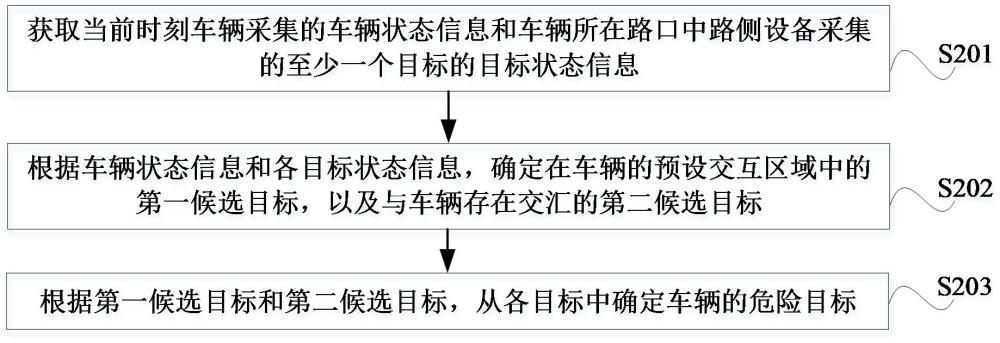
3、获取当前时刻车辆采集的车辆状态信息和车辆所在路口中路侧设备采集的至少一个目标的目标状态信息;
4、根据车辆状态信息和各目标状态信息,确定在车辆的预设交互区域中的第一候选目标,以及与车辆存在交汇的第二候选目标;
5、根据第一候选目标和第二候选目标,从各目标中确定车辆的危险目标。
6、在其中一个实施例中,车辆状态信息包括车辆位置;根据车辆状态信息和各目标状态信息,确定在车辆的预设交互区域中的第一候选目标,包括:
7、根据车辆位置,确定车辆所处的车辆车道;
8、根据车辆车道,确定车辆的预设交互区域;
9、根据各目标状态信息,将至少一个目标中处于预设交互区域内的目标确定为第一候选目标。
10、在其中一个实施例中,根据车辆位置,确定车辆所处的车辆车道,包括:
11、根据车辆位置,确定车辆在当前时刻是否处于车道中;
12、若车辆在当前时刻处于车道中,则将车辆在当前时刻所处的车道确定为车辆车道;
13、若车辆在当前时刻未处于车道中,则将车辆的车辆历史最近车道确定为车辆车道。
14、在其中一个实施例中,预设交互区域包括车辆与行人的第一交互区域、车辆与非机动车的第二交互区域,以及车辆与机动车的第三交互区域;根据各目标状态信息,将至少一个目标中处于预设交互区域内的目标确定为第一候选目标,包括:
15、根据各目标状态信息,确定至少一个目标中的行人、非机动车和机动车;
16、将处于第一交互区域的行人确定为第一候选目标;
17、将处于第二交互区域的非机动车确定为第一候选目标;
18、在目标为机动车的情况下,根据第三交互区域和机动车所处的目标车道,确定第一候选目标。
19、在其中一个实施例中,根据第三交互区域和机动车所处的目标车道,确定第一候选目标,包括:
20、从各机动车中获取处于第三交互区域的至少一个候选机动车;
21、针对任一个候选机动车,若候选机动车存在目标车道,则将候选机动车确定为第一候选目标;
22、若候选机动车不存在目标车道,则将与车辆之间的距离小于预设的机动车距离阈值的候选机动车,确定为第一候选目标。
23、在其中一个实施例中,车辆状态信息包括车辆位置;根据车辆状态信息和各目标状态信息,确定在车辆的预设交互区域中的第一候选目标,包括:
24、根据车辆位置以及预设的距离阈值,确定车辆的预设交互区域;
25、根据各目标的目标状态信息,将至少一个目标中处于预设交互区域内的目标确定为第一候选目标。
26、在其中一个实施例中,车辆的预设交互区域包括车辆与行人的第四交互区域,以及车辆与非机动车的第五交互区域;距离阈值包括行人距离阈值和非机动车距离阈值;根据车辆位置以及预设的距离阈值,确定车辆的预设交互区域,包括:
27、根据车辆位置和行人距离阈值,确定第四交互区域;
28、根据车辆位置和非机动车距离阈值,确定第五交互区域。
29、在其中一个实施例中,车辆状态信息包括车辆位置;目标状态信息包括目标位置;根据车辆状态信息和各目标状态信息,确定与车辆存在交汇的第二候选目标,包括:
30、根据车辆的车辆位置和车辆车道,预测车辆在路口的车辆行驶轨迹信息;
31、根据各目标的目标位置和目标车道,预测各目标在路口的目标行驶轨迹信息;
32、根据车辆行驶轨迹信息和各目标行驶轨迹信息,确定第二候选目标。
33、在其中一个实施例中,根据车辆的车辆位置和车辆车道,预测车辆在路口的车辆行驶轨迹信息,包括:
34、根据车辆车道和车辆位置,确定车辆进入路口的起点和离开路口的终点;
35、根据车辆的起点和终点,确定车辆在路口的车辆行驶轨迹信息。
36、在其中一个实施例中,根据各目标的目标位置和目标车道,预测各目标在路口的目标行驶轨迹信息,包括:
37、针对任一个目标,根据目标位置和目标车道,确定目标进入路口的起点和离开路口的终点;
38、根据目标的起点和终点,确定目标在路口的目标行驶轨迹信息。
39、在其中一个实施例中,根据车辆行驶轨迹信息和各目标行驶轨迹信息,确定第二候选目标,包括:
40、根据车辆行驶轨迹信息和各目标行驶轨迹信息,确定与车辆存在交汇的参考目标,以及车辆与参考目标的交汇位置;
41、根据交汇位置和车辆位置,确定车辆到达交汇位置的车辆时长;
42、根据交汇位置和参考目标的目标位置,确定参考目标到达交汇位置的目标时长;
43、根据车辆时长和目标时长,确定第二候选目标。
44、在其中一个实施例中,根据车辆时长和目标时长,确定第二候选目标,包括:
45、根据车辆时长和目标时长,确定车辆与参考目标之间的交汇时间差;
46、将交汇时间差的绝对值小于或等于预设的时长阈值的参考目标确定为第二候选目标。
47、在其中一个实施例中,根据第一候选目标和第二候选目标,从各目标中确定车辆的危险目标,包括:
48、将第一候选目标和第二候选目标中的重复目标剔除,得到总候选目标;
49、若总候选目标的数量小于或等于预设的数量阈值,则确定总候选目标为危险目标;
50、若总候选目标的数量大于数量阈值,则根据重复目标的数量与数量阈值之间的关系,确定危险目标。
51、在其中一个实施例中,根据重复目标的数量与数量阈值之间的关系,确定危险目标,包括:
52、在重复目标的数量大于或等于数量阈值的情况下,则获取重复目标与车辆的交汇时间差,将数量阈值个交汇时间差的绝对值较小的重复目标确定为危险目标;
53、在重复目标的数量小于数量阈值的情况下,则将重复目标确定为危险目标,并根据数量阈值和重复目标的数量,确定危险目标的剩余数量;
54、从除重复目标之外的其余总候选目标中确定剩余数量的危险目标。
55、在其中一个实施例中,车辆状态信息包括车辆位置;目标状态信息包括目标位置和目标速度;从除重复目标之外的其余总候选目标中确定剩余数量的危险目标,包括:
56、根据车辆位置和其余总候选目标的目标位置,确定车辆与其余总候选目标的真实距离;
57、根据预设的时间阈值和其余总候选目标的目标速度,确定其余总候选目标的目标距离;
58、根据真实距离、目标距离、预设的速度权重和距离权重,确定其余总候选目标的危险评价值;
59、将剩余数量个危险评价值较小的其余总候选目标确定为危险目标。
60、第二方面,本技术还提供了一种目标筛选装置,包括:
61、响应模块,用于响应于车辆发送的目标筛选请求,获取当前时刻车辆采集的车辆状态信息和车辆所在路口中路侧设备采集的至少一个目标的目标状态信息;
62、确定模块,用于根据车辆状态信息和各目标状态信息,确定在车辆的预设交互区域中的第一候选目标,以及与车辆存在交汇的第二候选目标;
63、筛选模块,用于根据第一候选目标和第二候选目标,从各目标中确定车辆的危险目标。
64、第三方面,本技术实施例提供一种计算机设备,包括存储器和处理器,存储器存储有计算机程序,该处理器执行计算机程序时实现上述第一方面中任一实施例提供的方法的步骤。
65、第四方面,本技术实施例提供一种计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现上述第一方面中任一实施例提供的方法的步骤。
66、第五方面,本技术实施例还提供了一种计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现上述第一方面中任一实施例提供的方法的步骤。
67、上述目标筛选方法和装置,获取当前时刻车辆采集的车辆状态信息和车辆所在路口中路侧设备采集的至少一个目标的目标状态信息,并根据车辆状态信息和各目标状态信息,确定在车辆的预设交互区域中的第一候选目标,以及与车辆存在交汇的第二候选目标,然后根据第一候选目标和第二候选目标,从各目标中确定车辆的危险目标。该方法中,根据车辆当前的状态信息和至少一个目标当前的状态信息,确定车辆的预设交互区域,并从预设交互区域中确定第一候选目标,解决了发送给智能驾驶车辆目标较多以及小目标遗漏的问题;并且,判断路口的目标是否与车辆存在交汇的可能性,将与车辆可能存在交汇的目标确定为第二候选目标,解决了路口中盲区、远端目标遗漏的问题;最后将第一候选目标和第二候选目标进行融合,以确定车辆的危险目标,提高了筛选路口中危险目标的准确性和可靠性。
- 还没有人留言评论。精彩留言会获得点赞!