多路线插电式混合动力公交车多目标稳健设计与控制方法
本发明属于插电式混合动力公交车领域,具体涉及一种多路线插电式混合动力公交车多目标稳健设计与控制方法。
背景技术:
1、随着新一轮科技革命和产业变革孕育兴起,新能源汽车产业进入了加速发展的新阶段,为重塑汽车能源格局、应对全球气候变化和实现汽车产业可持续发展带来了新机遇。大力发展插电式混合动力汽车已经成为世界共识,且均力图占据该领域的技术制高点。
2、电功率提升带来的能量深度耦合使插电式混合动力公交车具有多种高效的机、电耦合工作模式,为全局能量管理控制奠定了基础,同时公交工况的统计规律性使自适应能量管理控制成为可能,但是,节能潜力的充分挖掘取决于系统组件与控制的集成设计。因此,无论从学科发展和产业发展角度来看,开展pheb系统组件稳健设计和控制研究都具有重要意义。
3、当前,系统组件设计与控制已成为本领域国际学术界研究热点,问题难度主要体现在随机工况与随机质量和系统组件设计与控制的强耦合问题、多路线系统设计和控制的泛化问题和底层能量管理直接应用问题三个方面。
4、(1)随机工况与随机质量和系统组件设计与控制的强耦合问题
5、公交线路不同时段的拥堵程度、站台停留时间的随机性、信号灯信号的随机性和驾驶员操作模式的分散性造成运行工况的随机性。因此,任意运行工况均无法客观反映公交线路的总体运行状态,随机工况是系统设计与控制的一种扰动。此外,任意公交路线具有多个站台,由于乘客数的随机性,任意两相邻站台路段的整车质量也具有随机性,因此,随机质量是系统设计与控制的另一扰动。
6、(2)多路线系统组件设计与控制的泛化问题
7、现有系统组件设计与控制主要针对固定路线(固定距离)。不同路线距离对系统组件设计和控制的影响较随机工况更敏感。事实上,任意一款公交车较少运行于一条固定路线,而是运行于同一城市或者不同城市的不同路线,而且,不同路线的运行距离也不同。因此,开展具有较好泛化性能的多路线系统组件设计和控制研究具有重要意义。
8、(3)底层能量管理直接应用问题
9、能量管理是实现系统组件设计和控制的底层模块,当工况已知,基于动态规划的能量管理可获取最优解。工况已知的条件限制了其应用。以规则能量管理为底层求解模块的方法可解决这一问题。以规则能量管理为底层模块,实现了考虑油耗和排放的多目标系统组件设计和应用。然而,规则能量管理策略无法使系统组件设计达到最优。此外,虽然通过引入工况预测实现了自适应控制,但控制思想与原底层能量管理不同,这可能导致系统组件设计方案失效,恶化整车经济性。因此,兼具直接应用和系统组件设计的能量管理策略有待进一步研究。
10、专利cn201310577362公开了一种基于路况模型的插电式混合动力公交车动态逻辑门限能量管理方法,步骤如下:(1)根据公交车历史交通信息和神经网络建立车辆行驶路况模型;(2)根据发车时间、线路和路况模型得到未来行驶速度及道路坡度变化曲线;(3)基于上述曲线及车辆参数计算车辆行驶所需能量,并根据其与电池可提供能量的差值动态调整车辆能量管理逻辑门限参数;(4)车辆控制器根据车辆行驶参数与逻辑门限参数选择工作模式。其存在以下缺点,1.该方法只针对固定单路线的公交车的能量管理,对公交线路变化时并不适用。2.在车辆运行过程中随机工况和随机质量的变化没有考虑在内,公交车在实际的运行过程中,随机工况和随机质量对燃油的消耗率占比重也比较大,故应考虑到其对燃油经济性的影响中去。
技术实现思路
1、本发明要解决的技术问题是一种基于多路线插电式混合动力公交多目标稳健设计与控制方法针对单轴并联式插电式混合动力公交车,开展考虑多路线、随机工况和随机质量的系统组件稳健设计与控制关键技术研究。旨在提出一种满足设计和运行成本最优的两阶段系统组件稳健设计和控制方法,为产品研发提供理论指导和新的实践基础。
2、为解决上述问题,本发明采用如下技术方案:
3、p1:pheb建模:pheb的拓扑结构为单轴并联式插电式混合动力公交车,主要由发动机、离合器、自动手动变速器(amt)电机和电池组成,在设计能量管理的基础上,通过对离合器状态的控制,可以实现发动机、电机、混合动力等多种工作模式。从参数不同的发动机、电机和不同速比的传动系统确定最佳的部件和相应的能量管理参数,假设路边车辆质量为11000kg,最大乘客人数为60人,每个乘客的质量为70kg,这意味着车辆质量将从110000kg变化到152000kg,并且这种变化将在部件尺寸优化中被视为噪声。
4、由于系统设计中只关注能量效率,因此忽略了横向和纵向动态性能。根据纵向动力学原理,所需功率可以通过以下方式获得:
5、
6、其中:pr表示所需的功率;ηt表示传输系统的效率;m表示车辆质量;g表示重力加速度;fr表示滚动系数;v表示车辆的速度;cd表示空气动力学阻力系数;a表示额叶区域;δ表示旋转质量系数;β表示道路的角度。
7、由于电机可以在驱动模式下工作,也可以在发电模式下工作。电机的功率模型为:
8、
9、其中pm表示电机的功率;ηm表示电机的效率;nm和tm分别表示电机的速度和扭矩。
10、为了简化系统设计问题,soc的转换可以通过以下方式评估:
11、
12、其中:voc表示电压;pb表示电池的功率;rb表示内阻;qb表示电池容量。
13、因为只有瞬时油耗才是发动机的重点。对于每个发动机,瞬时油耗可以通过以下方式获得:
14、
15、其中me表示瞬时油耗;te表示发动机的扭矩;ne表示发动机的转速,(te,ne)表示燃油消耗率;
16、p2:自适应能量管理控制方法:拟基于反馈soc控制思想,建立基于pmp的自适应能量管理控制模型;考虑最优soc的不可预测性,研究一种动态域soc规划方法;考虑协调因子调节频率对整车能耗经济性的影响,研究一种基于协调因子均值反馈和容差控制的pi控制器;考虑不同路线、随机工况和随机质量对控制器的扰动,研究pi参数的鲁棒设计方法,进而建立满足底层能量管理求解和直接应用需求的自适应能量管理控制策略。
17、p3:设计域缩减和粗超解求解方法
18、多款不同发动机,不同驱动电机、传动系统传动比和pi参数构成了系统组件设计的复杂设计域。如果直接进行mop-dfss设计,将无法全面彻底地探索整个设计空间,并获取最佳的设计点。典型公交线路一般由多个站台和路段构成,且各路段整车质量具有随机性。为充分挖掘随机质量对与系统组件设计的耦合机理,需将各路段的整车质量设计成随机变量,并考虑多种不同的水平。因此,随机质量将构成复杂的噪声空间,如再考虑随机工况,噪声空间将更加难以处理。
19、为此,基于trd理论,开展设计域缩减和粗超解求解方法研究。基于远程监控系统选取并下载济南市一个月内,同一车型不同线路实车运行工况数据,并基于统计学理论,开展不同时段典型公交工况分类方法研究;设计包含pheb设计和运行成本的目标函数及其“望小特性”;研究以典型公交工况为随机工况因子和不同路段整车质量为随机质量因子的噪声均衡采样方法,以构建噪声矩阵;研究以系统组件和pi参数为控制因子的控制矩阵设计方法;以多路线自适应能量管理策略为底层计算模块,构建考虑控制矩阵和噪声矩阵的静态trd分析模型并提取粗超解;基于响应面的方法,建立灵敏度分析模型,揭示控制因子与响应“望小特性”之间的作用机理并挖掘关键系统组件和pi参数,以缩减设计域。
20、p4:多目标稳健系统组件设计与控制模型构建:不同公交路线目标值可能存在冲突,仅以油耗为例,80km长的公交线路,pheb平均油耗可能为12l,但是100km的公交线路平均油耗可能为10l。这除与组件设计相关外,也与不同公交线路的运行特点相关,例如,80km长的公交线路可能全天运行压力较大,且交通拥堵、十字路口较多,而100km长线路可能全天运行压力较小,且交通顺畅。相反,当不同公交线路运行特点一致时,控制因子对不同公交路线目标值的影响也可能一致。因此,需要揭示不同运行工况下,控制因子与目标值的相互作用机理,并设计合理的多目标优化设计方法。研究具有高求解效率,高求解精度的可靠度分析方法;融合控制因子、噪声因子、可靠度分析与全局寻优算法,研究mop-dfss实现方法,并构建系统组件稳健设计与控制模型;
21、p5:研究稳健设计方案的可实现问题。设计包含底层驱动、高低压上下电逻辑、故障诊断系统和动力传动部件执行器协调控制等问题的执行层控制逻辑;基于混合动力系统硬件在环测试平台,研究稳健设计方案的测试流程与方法;基于稳健设计方案,更换底盘域混合动力系统综合性能试验台部件,并对包含自适应能量管理策略和执行层策略的整车控制系统开展拟实车道路工况的台架验证。
22、进一步的优选技术方案如下:
23、所述的步骤2中自适应能量管理控制方法,首先设计动态域soc规划模型,然后基于反馈soc控制思想和参考soc设计自适应能量管理策略。关键技术为:其一,动态域soc拟设计为矩形域,且根据当前反馈soc值和目标值每隔60s规划一次;其二,提出协调因子均值反馈的控制思想,以弱化协调因子调节频率,最大化反馈soc的波动;其三,引入容差控制思想,以进一步增加反馈soc波动,即如果反馈soc位于可行域范围内,则不调控,反之,调控。
24、所述的步骤3中基于trd理论,开展设计域缩减和粗超解求解方法研究。首先将多款不同发动机、驱动电机、传统系统传动比和pi参数设计为控制因子,并基于离散变量(发动机和驱动电机)的类型数量和连续变量(传动比和pi参数)的范围设计不同的水平;然后,根据不同路线历史工况的不同类别以及不同路线中的最大路段数量设计不同的噪声因子和足够数量的噪声水平;其次,基于最优拉丁方采样方法对控制因子和噪声因子进行均衡采样,并构建田口稳健内外表;再次,设计目标函数的“望小特性”和终端soc“望目特性”特性值;最后,执行计算,获取粗糙解和可行设计点,并存入数据库。
25、所述的步骤4中多目标稳健系统组件设计与控制模型构建。首先,设计多目标优化算法,即如果该问题为一致性目标问题,目标函数设计为各路线目标值的加权和,且引入多岛遗传算法,相反,则引入第二代非劣排序遗传算法;然后,将工况和质量建模成随机变量并假设服从正态分布,基于描述性采样方法对其进行采样,并构建噪声矩阵;再次,以自适应能量管理策略为底层求解模块,基于蒙特卡洛可靠性分析方法,对性能函数和终端soc进行分析,并输出均值,标准差和sigma水平等响应;最后,将响应反馈给多目标优化模块,并基于该模块对当前控制因子进行评估,如果满足设计要求,则停止,如果不满足,则重复上述过程。
26、基于多路线插电式混合动力公交车多目标稳健设计与控制方法,在步骤2中基于pmp的能量管理的制定。将soc作为最优能量管理控制问题的状态,将发动机节气门和amt换挡指令作为控制变量。通过最优拉丁方设计对两个控制变量进行采样,并作为一个控制变量,为了提高整车的燃油经济性,成本函数定义为燃油消耗量和amt换挡次数的加权和其表示为:
27、
28、其中j表示代价函数,uc(t)表示控制向量;a表示控制因子;shift(t)为换挡指令。
29、基于pmp的原理,能量管理可以通过以下方式制定:
30、
31、其中h(x(t),uc(t),λ(t),t)表示哈密顿函数,ωe(t)和ωm(t)分别表示发动机和电机的转速,ωe_min、ωe_max和ωm_min、ωm_max表示相应的边界;pe(t)和pm(t)表示发动机和电机的功率;pe_min(ωe(t))、pe_max(ωe(t))、pm_min(ωm(t))和pm_max(ωm(t))表示权重因子。
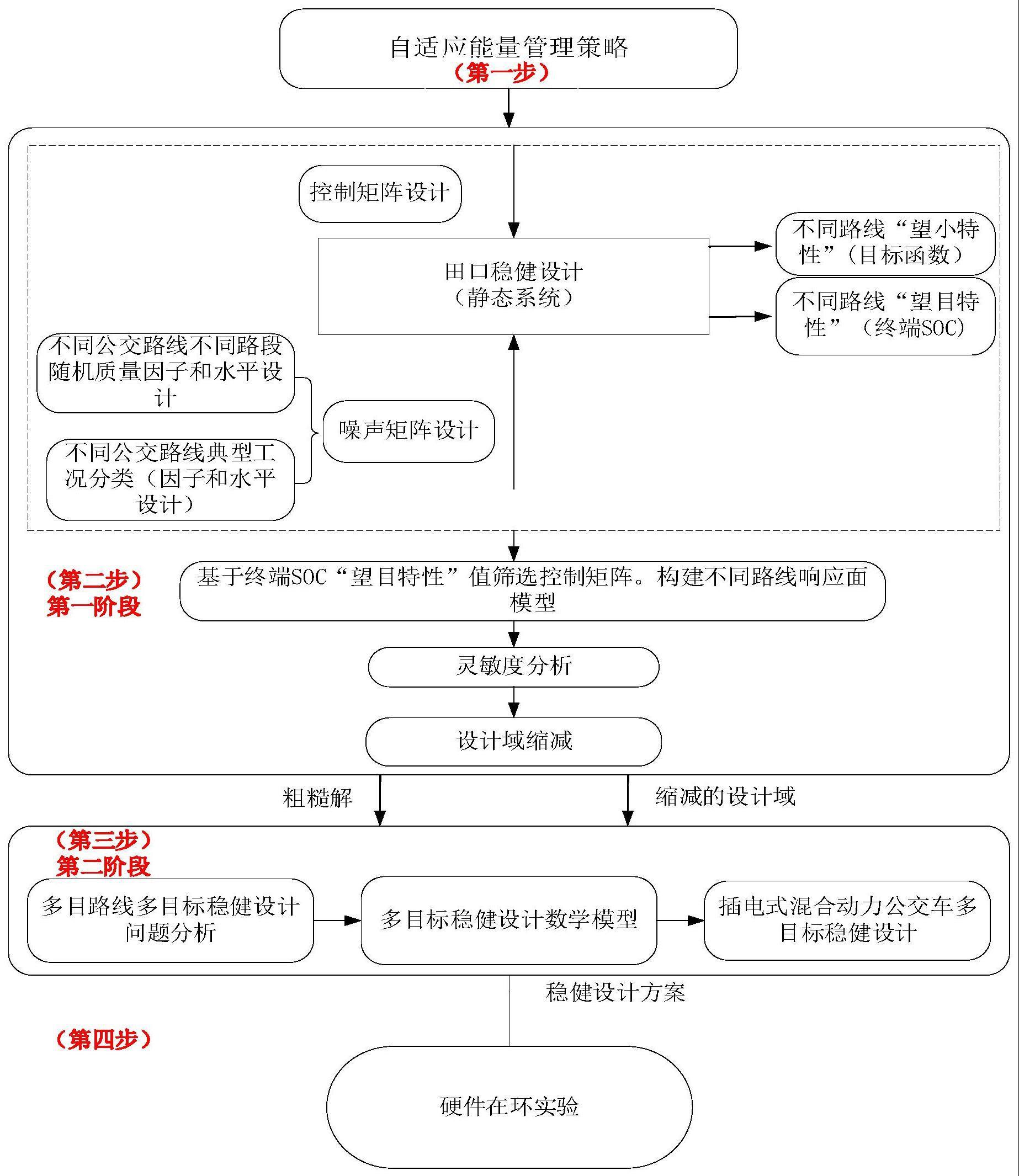
32、本发明采用的研究方案技术路线,第一步:基于pmp和反馈控制理论开发自适应能量管理策略。第二步,即稳健设计第一阶段。首先,研究基于静态田口稳健问题的系统组件设计方法,获取粗糙解,系统组件和pi参数的控制矩阵,目标函数的“望小特性”和终端soc的“望目特性”特性值;然后,基于终端soc“望目特性”值,筛选并重构控制矩阵,并以其为输入,对应“望小特性”为输出,构建响应面模型并缩减设计域。第三步,即稳健设计第二阶段:首先,揭示多路线多目标优化性质,并设计研究多目标稳健设计算法;然后,将粗糙解作为多目标稳健设计初值,并构建mop-dfss模型。第四步,稳健设计方案实验验证。
- 还没有人留言评论。精彩留言会获得点赞!