一种汽车悬架涡激振动能量收集系统及控制方法
本发明属于汽车悬架能量收集,具体涉及一种汽车悬架涡激振动能量收集系统及控制方法。
背景技术:
1、目前汽车的节能环保已经成为技术发展的最前沿,而汽车行驶过程中的风能取之不尽用之不竭,不存在任何污染,为此,如何收集汽车行驶过程中的风能成为技术发展的难点。由于汽车减振器筒在行驶过程中会与空气气流接触产生阻力,并在减振器筒后方产生卡门涡街现象,在涡街内部会周期性地脱落出旋转方向相反、并排列成有规则的双列线涡,如果涡街的交替脱落频率与物体的声学驻波频率相重合,会出现共振。共振会使物体的振幅放大,贴有压电陶瓷的铜板经过设计在涡街中产生振动从而利用压电效应产生电流。
2、目前针对汽车悬架能量收集的方案主要包括悬架减振器的垂向振动能量收集、悬架减振器的垂向振动转换为发电机的旋转运动能量收集等,然而这些方法存在可靠性不高,且能量收集会影响汽车悬架减振状态,影响驾驶稳定性。
3、现有风能的能量收集只考虑一定风速条件下,即汽车匀速行驶,气流流经悬架减振器筒的两侧产生涡激振动,涡街漩涡的交替脱落位置与频率固定,贴有压电陶瓷的铜板位置也相对固定,并没有将其拓展应用于汽车行驶过程中车速变化情况,当风速变化时,悬架减振器筒后方涡街尾流也会逐渐拉长,因此,贴有压电陶瓷的铜板位置需要根据具体车速改变位置。为保持贴有压电陶瓷的铜板能量收集效率最大化,此时需要对贴有压电陶瓷的铜板进行主动控制,使其可以根据车速情况做出位置变化运动。
技术实现思路
1、针对于上述现有技术的不足,本发明的目的在于提供一种汽车悬架涡激振动能量收集系统及控制方法,以解决现有技术中的汽车行驶过程中外界风场产生的机械能量收集效率低的问题。
2、为达到上述目的,本发明采用的技术方案如下:
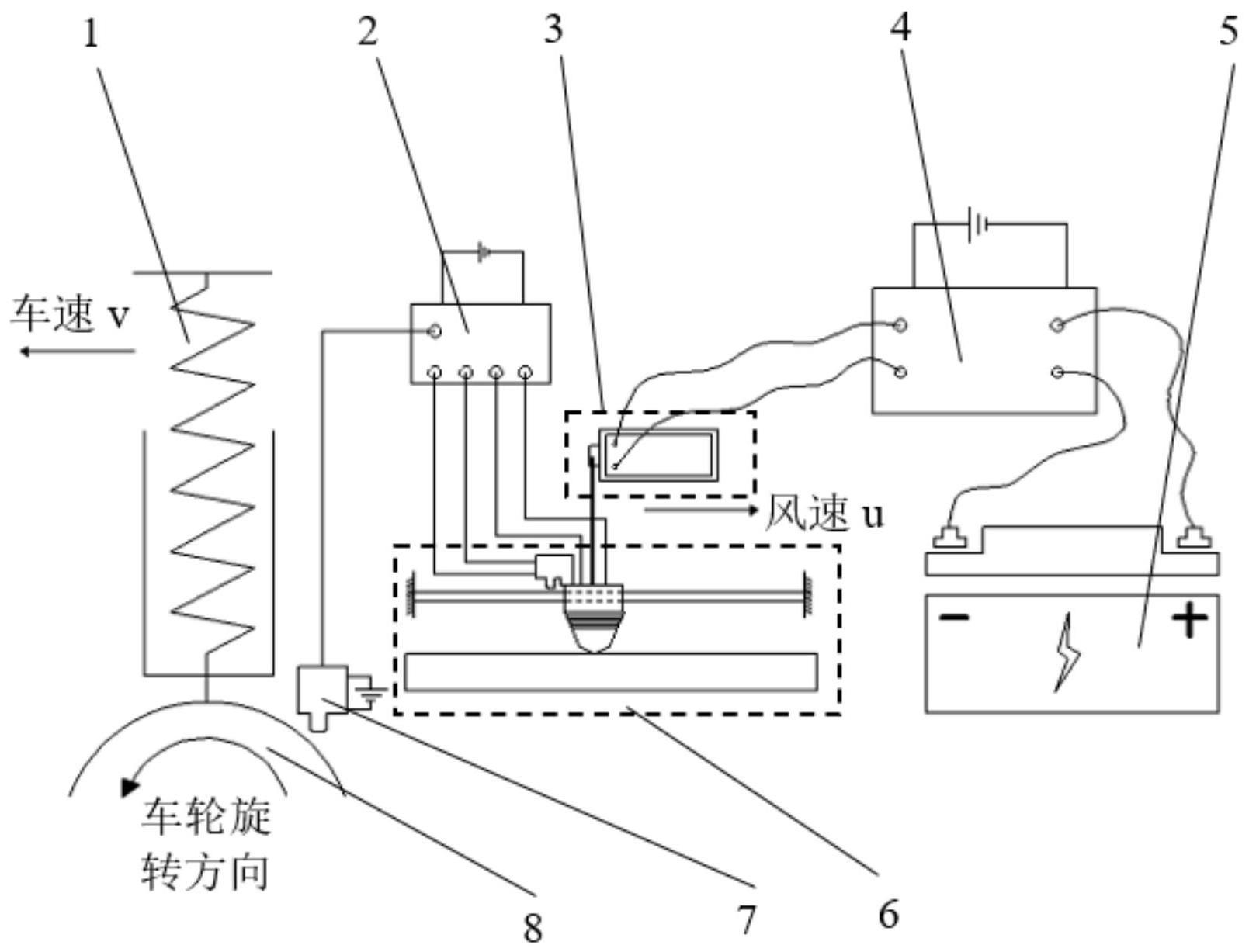
3、本发明的一种汽车悬架涡激振动能量收集系统,其利用压电陶瓷收集悬架减振器筒后方的涡激振动能量,包括:悬架减振器筒、压电收集板、直线作动器、整流电路、汽车储能电池、车速传感器、车轮、位移传感器、压电控制器;
4、所述悬架减振器筒与汽车车架机械连接;所述车轮安装在悬架减振器筒的下方;所述压电收集板设于所述悬架减振器筒的后方,压电收集板与所述直线作动器机械连接,压电收集板与所述整流电路电性连接,压电收集板产生的电压信号通过信号线传输给整流电路;所述汽车储能电池与整流电路电性连接,整流电路将直流信号通过信号线传输给汽车储能电池;直线作动器与汽车车架机械连接;所述车速传感器安装在车轮的后方,用于测量车轮旋转速度,车速传感器与所述压电控制器电性连接,并将车速信号通过信号线传输给压电控制器;所述位移传感器与直线作动器机械连接,位移传感器测量直线作动器的移动距离,位移传感器还与压电控制器电性连接,并位移信号通过信号线传输给压电控制器;压电控制器与直线作动器电性连接,压电控制器产生相位差为90°的两相正弦高频电压信号并通过信号线传输给直线作动器;
5、所述压电收集板包括:第一压电陶瓷、基板、收集板固定支架;所述第一压电陶瓷通过环氧树脂粘贴在所述基板一侧表面;所述基板的材料为磷青铜,形状为长方形,信号线的数量为两条,从第一压电陶瓷的内部电极中引出,用于输出电流;基板通过螺栓螺母连接固定于所述收集板固定支架上,收集板固定支架通过螺栓螺母连接固定在直线作动器中;
6、所述直线作动器包括:驱动足、第二压电陶瓷、滑块、滑轨、底座;所述第二压电陶瓷的一表面通过环氧树脂粘贴在所述驱动足的上表面,第二压电陶瓷的另一表面通过环氧树脂粘贴在滑块的下表面,滑块中间穿过所述滑轨,并与滑轨相互配合,滑块的上表面与收集板固定支架机械连接,驱动足的下表面凸起部分与底座接触,滑轨和底座均通过螺栓螺母固定在汽车底盘上;所述收集板固定支架固定于滑块内。
7、进一步地,所述第一压电陶瓷、第二压电陶瓷均选用锆钛酸铅压电陶瓷pzt-5。
8、进一步地,所述底座的上表面为聚四氟乙烯摩擦涂层。
9、进一步地,所述压电控制器包括:控制计算模块、驱动模块及信号采集模块;
10、所述控制计算模块,用于计算输出量,选用fpga芯片,型号为xc7s75-2fgga676i;
11、所述驱动模块,包含正弦信号发生器、功率放大器与光耦隔离器;正弦信号发生器用于产生两相正弦驱动信号;功率放大器用于将驱动信号的功率放大,使其具有带载能量;光耦隔离器用于减小两相信号之间的干扰;
12、所述信号采集模块,用于收集车速传感器与位移传感器的方波脉冲信号。
13、进一步地,所述整流电路为微弱信号采集放大电路,型号为tlc2652。
14、进一步地,所述汽车储能电池为锂离子电池,型号为wr800。
15、进一步地,所述车速传感器为霍尔式转速传感器,型号为sc12-20k。
16、当汽车以某一速度行驶,空气通过汽车发动机舱中网和翼子板进入悬架机构附近区域,气流绕过悬架减振器筒时在其后方产生卡门涡街;压电收集板在卡门涡街内部因为涡流脱离的作用会产生振动,压电收集板的固有频率与卡门涡街的脱涡频率接近,振动被放大,压电收集板的第一压电陶瓷由于正压电效应产生电流并从信号线输出至整流电路;电流经过整流电路整流处理输入到汽车储能电池。
17、进一步地,所述压电收集板的能量收集过程具体包括:
18、压电收集板的长度为l,宽度为b,高度为h;压电收集板由基板与第一压电陶瓷组成;基板的长度为l,宽度为b,高度为hm;第一压电陶瓷的长度为x,宽度为b,高度为hp;压电收集板的高度h=hp+hm;压电收集板的中性线距离基板底面的高度为z;
19、压电收集板的中性线距离基板底面的高度z为:
20、
21、式中,ep与em分别表示第一压电陶瓷与基板的弹性模量;
22、压电收集板的截面惯性矩i表示为:
23、
24、压电收集板的一阶固有频率f为:
25、
26、式中,s为横截面面积;s=b(hm+hp);l为基板的长度;ρ为基板的线密度;
27、得到压电收集板一阶固有频率f为:
28、
29、式中,ρp为第一压电陶瓷线密度,ρm为基板线密度;
30、压电收集板的固有频率与脱涡频率相等;
31、根据夹持方式与边界条件,得到压电收集板对应的压电方程为:
32、
33、式中,h为电位移;e为压电应力系数;et为e的转置矩阵;s为应变;t为应力;e为电场强度;εs为应变恒定时的介电常数;ce为场强恒定时的弹性刚度系数;
34、将压电收集板简化为单自由度压电振动系统,系统振动微分方程为:
35、
36、式中,m为压电收集板的等效质量;c为压电收集板的等效阻尼;k为压电收集板的等效刚度;u为位移;f为激振力;v为压电收集板的两端开路电压;θ为第一压电陶瓷的压电应力系数;
37、压电收集板的等效质量m表示为:
38、
39、压电收集板的等效刚度k表示为:
40、
41、压电收集板的等效阻尼c表示为:
42、
43、式中,c0为第一压电陶瓷的单位面积电容;b为第一压电陶瓷的宽度;x为第一压电陶瓷的长度;c0bx为第一压电陶瓷的总电容;α为第一压电陶瓷的机械损耗系数;
44、阻尼系数z为:
45、
46、式中,e′为第一压电陶瓷阻尼层杨氏模量与基板弹性层杨氏模量之比,e′=e2/e1,e2为第一压电陶瓷阻尼层杨氏模量,e1为基板弹性层杨氏模量;h′为第一压电陶瓷阻尼层厚度与基板弹性层厚度之比,h′=h2/h1,h2为第一压电陶瓷阻尼层厚度,h1为基板弹性层厚度;
47、能量守恒方程为:
48、
49、将电位移方程等号两端同时乘以压电面积,并对时间进行求导得到:
50、
51、两边同时乘以开路电压v并积分得到:
52、
53、式中,cp为第一压电陶瓷的静态电容;v、is分别为压电收集板的两端开路电压和输出的电流。
54、本发明还提供一种汽车悬架涡激振动能量收集系统的控制方法,基于上述系统,步骤如下:
55、1)车速传感器实时采集车速信息,并将车速信息发送给压电控制器,压电控制器查询参数表得到压电收集板的理想位置;压电控制器输出两相相位差为90°的高频正弦电压信号给第二压电陶瓷,第二压电陶瓷产生行波振动,驱动足产生受迫振动,驱动足与底座通过摩擦接触的方式产生前进动作;若两相高频正弦电压信号的相位差为90°,则驱动足向汽车前进的方向移动;若两相高频正弦电压信号的相位差为-90°,则驱动足向汽车前进方向相反的方向移动;滑块沿滑轨滑动,保证驱动足沿直线方向运动;
56、2)位移传感器实时采集驱动足的前进位移,并将前进位置信息发送给压电控制器,压电控制器计算驱动足理想位置与实际位置的差值,通过比例积分微分控制调节压电控制器的两相高频正弦电压信号的驱动时间,使驱动足上的压电收集板达到理想位置;
57、3)压电收集板在理想位置利用压电效应产生输出电流,并通过整流电路进行整流放大后,输入至汽车储能电池。
58、进一步地,所述步骤1)具体包括:
59、设定风速为0,汽车与静止空气相对运动,车速与流经汽车悬架减振器筒的空气流速一致,车速传感器将车速信号通过信号线输入至压电控制器,压电控制器中存储有预先定制的车速与压电收集板理想位置的参数表,根据参数表得到当前车速下的压电收集板的理想位置;
60、汽车车速与压电收集板理想位置的对应关系为:
61、x(v)=0.0025v2-0.025v+4.5
62、式中,v表示车速,x表示压电收集板的位移。
63、进一步地,所述步骤2)具体包括:
64、压电收集板的理想位置与实际位置的差值e(t)为:
65、e(t)=x0-x(v)
66、式中,x0为压电收集板的实际位置,x(v)为压电收集板的理想位置;
67、将压电收集板的理想位置与实际位置的差值e(t)作为pid控制器的输入,pid控制器控制输出u(t)为压电控制器的两相高频正弦电压信号的驱动时间,表示为:
68、
69、式中,kp为比例系数;tt为微分常数;tdt为积分常数;u0(t)为控制常量。
70、进一步地,所述步骤2)中通过pid控制器对两相高频正弦信号的驱动时间的控制调节,驱动足与压电收集板到达理想位置,当驱动足的行波运动停止时,因摩擦力的作用,驱动足无法继续运动,以自锁的方式停止在理想位置。
71、本发明的有益效果:
72、本发明用于收集汽车悬架涡激振动能量,能够利用减振器筒后方的涡激振动根据正压电效应产生电能,且随着车速变化能够实时跟踪压电收集板收集过程中的最佳效率位置,并利用逆压电效应实现压电收集板的位置发生变化,实现能量收集效率的提升。
73、本发明设置有压电收集板、直线作动器,当汽车行驶时,车速传感器反馈到控制器,根据车速信息,压电收集板直线作动器将压电收集板移动至适合的位置,在该位置压电收集板可以更好的与卡门涡街中的漩涡脱离产生共振,实现能量的回收,此时,直线作动器将不再工作,因为其具有断电自锁、低速力矩大、不受电磁干扰影响等优点。
- 还没有人留言评论。精彩留言会获得点赞!