一种弯道场景下的雷达误识别防止方法、存储介质及装置与流程
本发明涉及汽车智能网联领域,具体涉及一种弯道场景下的雷达误识别防止方法、存储介质及装置。
背景技术:
1、对于带挂商用车而言,在弯道场景中,当车头与挂车不在同一车道时,例如在左转弯场景中,车辆处于弯道时,车头在从左往右的第二车道中,挂车一部分在从左往右的第一车道中,且第一车道和第二车道间的车道线从挂车中穿过,此时采用侧向毫米波雷识别,车头的侧向毫米波雷点云会识别到挂车在第一车道的车道线内,并将挂车误判定为障碍物,且障碍物速度与车头相同,此时按照换道策略,车辆无法进行向左换道,但是,当车辆左侧满足换道条件时,车辆是可以换道至第一车道的,显然,雷达识别得到的情况与真实情形不符。因此,对于弯道场景下的雷达误识别,是当前亟需解决的问题。
技术实现思路
1、针对现有技术中存在的缺陷,本发明的目的在于提供一种弯道场景下的雷达误识别防止方法、存储介质及装置,能够有效避免车辆的挂车在弯道被雷达误识别为障碍物,提升带挂商用车弯道换道操作的准确性。
2、为达到以上目的,本发明提供的一种弯道场景下的雷达误识别防止方法,具体包括以下步骤:
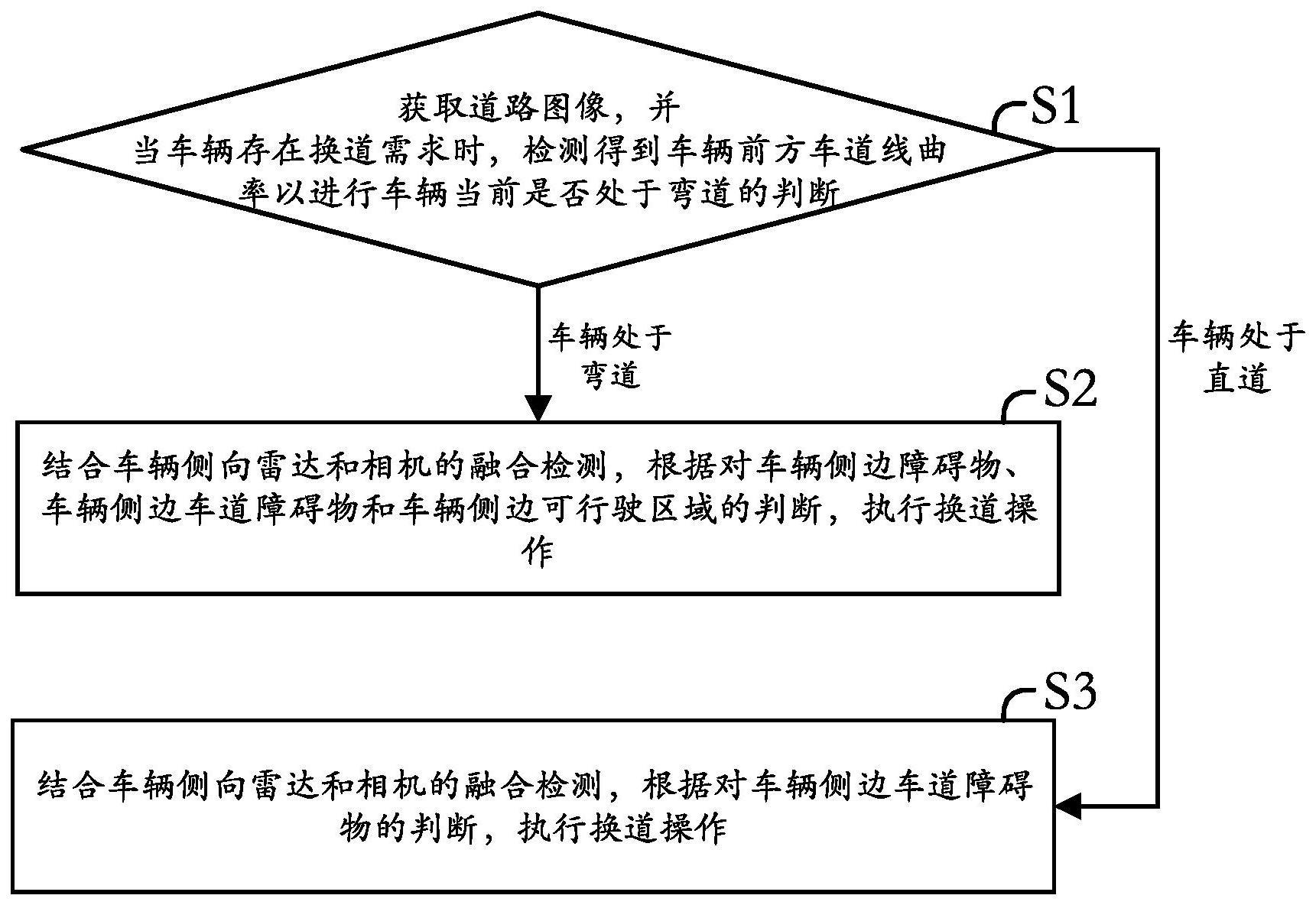
3、获取道路图像,并当车辆存在换道需求时,检测得到车辆前方车道线曲率以进行车辆当前是否处于弯道的判断:
4、若车辆处于弯道,则结合车辆侧向雷达和相机的融合检测,根据对车辆侧边障碍物、车辆侧边车道障碍物和车辆侧边可行驶区域的判断,执行换道操作;
5、若车辆处于直道,则结合车辆侧向雷达和相机的融合检测,根据对车辆侧边车道障碍物的判断,执行换道操作。
6、在上述技术方案的基础上,所述检测得到车辆前方车道线曲率以进行车辆当前是否处于弯道的判断,具体步骤包括:
7、通过车辆前相机获取得到道路图像,并基于计算机视觉识别技术对道路图像进行处理,提取得到车道线;
8、基于对车道线的持续跟踪和识别,计算得到车道线的曲率,并执行判断操作:
9、若车道线的曲率大于设定曲率阈值,则判定车辆当前处于弯道;
10、若车道线的曲率不大于设定曲率阈值,则判定车辆当前处于直道。
11、在上述技术方案的基础上,所述若车辆处于弯道,则结合车辆侧向雷达和相机的融合检测,根据对车辆侧边障碍物、车辆侧边车道障碍物和车辆侧边可行驶区域的判断,执行换道操作,具体步骤包括:
12、判定得到车辆处于弯道时,结合车辆侧向雷达和相机的融合检测:
13、若车辆侧边不存在障碍物,根据对车辆侧边车道障碍物的判断,执行换道操作;
14、若车辆侧边存在障碍物:
15、-当车辆与车辆侧边障碍物间的纵向距离大于设定值时,根据对车辆侧边车道障碍物的判断,执行换道操作;
16、-当车辆与车辆侧边障碍物间的纵向距离不大于设定值时,根据对车辆侧边可行驶区域的判断,执行换道操作。
17、在上述技术方案的基础上,所述若车辆侧边不存在障碍物,根据对车辆侧边车道障碍物的判断,执行换道操作,具体步骤包括:
18、当车辆侧向雷达检测得到车辆侧边不存在障碍物时,则根据车辆侧向雷达和相机的融合检测结果:
19、若车辆侧边车道不存在障碍物,则执行换道操作;
20、若车辆侧边车道存在障碍物,则当车辆满足换道策略时,执行换道操作,当车辆不满足换道策略时,不执行换道操作;
21、其中,所述换道策略为车辆由当前车道换道至侧边车道时,不与侧边车道的车辆或障碍物发生碰撞。
22、在上述技术方案的基础上,所述当车辆与车辆侧边障碍物间的纵向距离大于设定值时,根据对车辆侧边车道障碍物的判断,执行换道操作,具体步骤包括:
23、当车辆侧向雷达检测得到车辆与车辆侧边障碍物间的纵向距离大于设定值时:
24、若车辆侧边车道不存在障碍物,则执行换道操作;
25、若车辆侧边车道存在障碍物,则当车辆满足换道策略时,执行换道操作,当车辆不满足换道策略时,不执行换道操作;
26、其中,所述换道策略为车辆由当前车道换道至侧边车道时,不与侧边车道的车辆或障碍物发生碰撞。
27、在上述技术方案的基础上,所述当车辆与车辆侧边障碍物间的纵向距离不大于设定值时,根据对车辆侧边可行驶区域的判断,执行换道操作,具体步骤包括:
28、当车辆侧向雷达检测得到车辆与车辆侧边障碍物间的纵向距离不大于设定值时,通过相机获取道路的实时图像;
29、对获取的图像进行预处理,并利用计算机视觉识别技术识别得到图像中的可行驶区域关联特征,确定车道的可行驶区域;
30、基于确定的可行驶区域,并当可行驶区域满足设定区域要求时:
31、若车辆侧边车道当前可行驶,则执行换道操作;
32、若车辆侧边车道当前不可行驶,则不执行换道操作。
33、在上述技术方案的基础上,
34、所述设定值大于计算值;
35、所述计算值的计算方式为:
36、a=l+|a|
37、其中,a表示计算值,l表示车辆侧向雷达到车辆挂车尾端的距离,a表示车辆侧向雷达的距离检测误差。
38、在上述技术方案的基础上,所述若车辆处于直道,则结合车辆侧向雷达和相机的融合检测,根据对车辆侧边车道障碍物的判断,执行换道操作,具体步骤包括:
39、判定得到车辆处于直道时,结合车辆侧向雷达和相机的融合检测:
40、若车辆侧边车道不存在障碍物,则执行换道操作;
41、若车辆侧边车道存在障碍物,则当车辆满足换道策略时,执行换道操作,当车辆不满足换道策略时,不执行换道操作;
42、其中,所述换道策略为车辆由当前车道换道至侧边车道时,不与侧边车道的车辆或障碍物发生碰撞。
43、本发明提供的一种非暂态计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现上述所述弯道场景下的雷达误识别防止方法的步骤。
44、本发明提供的一种弯道场景下的雷达误识别防止装置,包括:
45、判断模块,其用于获取道路图像,并当车辆存在换道需求时,检测得到车辆前方车道线曲率以进行车辆当前是否处于弯道的判断,若车辆处于弯道,则驱使第一执行模块工作,若车辆处于直道,则驱使第二执行模块工作;
46、第一执行模块,其用于结合车辆侧向雷达和相机的融合检测,根据对车辆侧边障碍物、车辆侧边车道障碍物和车辆侧边可行驶区域的判断,执行换道操作;
47、第二执行模块,其用于结合车辆侧向雷达和相机的融合检测,根据对车辆侧边车道障碍物的判断,执行换道操作。
48、与现有技术相比,本发明的优点在于:通过获取道路图像,并当车辆存在换道需求时,检测得到车辆前方车道线曲率以进行车辆当前是否处于弯道的判断,并当车辆处于弯道时,结合车辆侧向雷达和相机的融合检测,根据对车辆侧边障碍物、车辆侧边车道障碍物和车辆侧边可行驶区域的判断,执行换道操作,即通过侧向相机进行可行驶区域的判断,与侧向雷达结果融合后输出最终的障碍物判定结果,有效避免车辆的挂车在弯道被雷达误识别为障碍物,而无法进行换道操作的问题,有效提升带挂商用车弯道换道操作的准确性。
- 还没有人留言评论。精彩留言会获得点赞!