电机扭矩过零控制方法、装置、车辆、电子设备及介质与流程
本发明涉及车辆,尤其涉及一种电机扭矩过零控制方法、装置、车辆、电子设备及介质。
背景技术:
1、新能源汽车通常由驱动电机驱动,典型的传动系统包括电机、减速箱、差速器、半轴和车轮。减速箱和差速器齿轮存在一定的间隙,同时随着车辆的老化,轴承或齿轮出现磨损后齿隙会发生变化。
2、根据驱动电机四象限原理,其输出扭矩存在正负值、输出转速存在正负转速,因传动系统间隙的存在,电机扭矩正负转向时(即扭矩过零)会存在齿轮靠齿、打齿而带来的异响问题。一般情况下驾驶员踩下油门踏板幅度越大,电机输出扭矩越大,传动系统异响越严重,同时扭矩过零后电机转速也可能会出现波动导致传动系统扭矩振荡、车辆窜动,进而引发驾驶舒适性问题。通过改变驱动电机扭矩过零时刻的扭矩梯度可以改善和优化扭矩过零时的传动系统异响问题,但扭矩过零梯度过大则无法彻底消除靠齿异响,过小则影响扭矩响应速率甚至出现动力中断的驾驶主观感受,因此需要合理选择扭矩过零梯度值。
3、相关技术中,对于扭矩过零梯度值的确定通常是在试验车上实车标定得到合适的扭矩过零梯度值,将该方式得到的扭矩过零梯度值固定适用于与试验车同类型的其他车辆,但这种方法获得的扭矩梯度值针对试验车当下较为有效,有时无法覆盖车辆偏差导致不适用同型号的其他车辆,或者对同型号的其他车辆在刚使用时是通用的,但是随着车辆的使用过程,导致传动系统发生变化,进而使得该固定的扭矩过零梯度值不再适用。
技术实现思路
1、本发明提供一种电机扭矩过零控制方法、装置、车辆、电子设备及介质,以解决相关技术中通过固定的扭矩过零梯度值进行电机扭矩过零控制时,针对试验车当下较为有效,有时无法覆盖车辆偏差导致不适用同型号的其他车辆,或者对同型号的其他车辆在刚使用时是通用的,但是随着车辆的使用过程,导致传动系统发生变化,进而使得该固定的扭矩过零梯度值不再适用的技术问题。
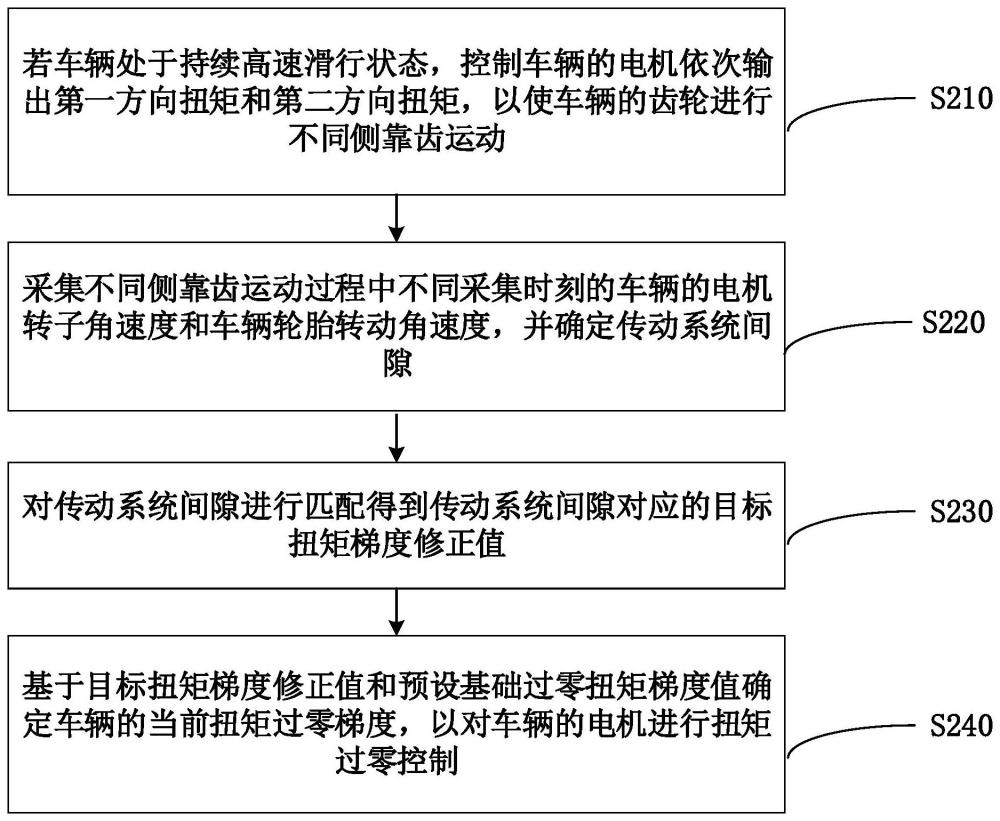
2、本发明实施例提供了一种电机扭矩过零控制方法,所述方法包括:若车辆处于持续高速滑行状态,控制所述车辆的电机依次输出第一方向扭矩和第二方向扭矩,以使所述车辆的齿轮进行不同侧靠齿运动;采集不同侧靠齿运动过程中不同采集时刻的所述车辆的电机转子角速度和车辆轮胎转动角速度,并确定传动系统间隙;对所述传动系统间隙进行匹配得到所述传动系统间隙对应的目标扭矩梯度修正值;基于所述目标扭矩梯度修正值和预设基础过零扭矩梯度值确定所述车辆的当前扭矩过零梯度,以对所述车辆的电机进行扭矩过零控制。
3、于本发明一实施例中,控制所述车辆的电机依次输出第一方向扭矩和第二方向扭矩之前,所述方法还包括:获取所述车辆的扭矩过零梯度的更新标识,所述更新标识包括上一更新时间、上一更新车辆行驶里程中至少之一;若所述更新标识包括上一更新时间,根据所述上一更新时间和当前时间确定梯度更新时长,如果所述梯度更新时长大于预设梯度时长阈值,确定所述车辆满足第一触发条件;若所述更新标识包括上一更新车辆行驶里程,根据所述上一更新车辆行驶里程和当前车辆行驶里程确定梯度更新里程,如果所述梯度更新里程大于预设里程阈值,确定所述车辆满足第二触发条件;若车辆处于持续高速滑行状态,且所述车辆满足第一触发条件和第二触发条件中至少之一,触发控制所述车辆的电机依次输出第一方向扭矩和第二方向扭矩。
4、于本发明一实施例中,控制所述车辆的电机依次输出第一方向扭矩和第二方向扭矩之前,所述方法还包括:获取所述车辆的传动系统故障信息;根据所述传动系统故障信息匹配得到故障处置方案;若所述故障处置方案包括传动系统部件更换、传动系统部件位置调整中至少之一,且所述车辆的车轮处于持续高速滑行状态,触发控制所述车辆的电机依次输出第一方向扭矩和第二方向扭矩。
5、于本发明一实施例中,控制所述车辆的电机依次输出第一方向扭矩和第二方向扭矩,包括:控制所述车辆的电机输出第一方向扭矩,监测所述电机转子角速度和车辆轮胎转动角速度的同步状态;当所述同步状态为同步的持续时长大于预设第一时长阈值,控制车辆的电机输出第二方向扭矩,以使所述同步状态由同步变化为异步再变化为同步。
6、于本发明一实施例中,采集不同侧靠齿运动过程中不同采集时刻的所述车辆的电机转子角速度和车辆轮胎转动角速度,包括:自初始采集时刻起采集所述电机转子角速度和车辆轮胎转动角速度,所述初始采集时刻为控制所述电机输出第一方向扭矩的时刻;持续采集所述电机转子角速度和车辆轮胎转动角速度,直到达到结束采集时刻,所述结束采集时刻为所述同步状态第二次达到同步的持续时长大于预设第二时长阈值时的时刻。
7、于本发明一实施例中,确定传动系统间隙,包括:计算目标时段中每一采集时刻的所述电机转子角速度与所述车辆轮胎转动角速度之间的角速度偏差,所述目标时段的目标起始时刻大于或等于第一时刻,所述目标时段的目标结束时刻小于或等于第二时刻,所述第一时刻为在不同侧靠齿运动过程中所述电机转子角速度和车辆轮胎转动角速度的同步状态发生第一次突变的时刻,所述第二时刻为在不同侧靠齿运动过程中所述电机转子角速度和车辆轮胎转动角速度的同步状态发生第二次突变的时刻;对角速度偏差进行积分,得到所述传动系统间隙。
8、于本发明一实施例中,计算目标时段中每一采集时刻的所述电机转子角速度与所述车辆轮胎转动角速度之间的角速度偏差之前,所述方法还包括:控制所述车辆的电机输出第二方向扭矩后,监测所述电机转子角速度和车辆轮胎转动角速度的同步状态;将所述同步状态由同步突变为异步的时刻确定为目标起始时刻;将所述同步状态由异步突变为同步的时刻确定为目标结束时刻;基于所述目标起始时刻和所述目标结束时刻生成所述目标时段。
9、于本发明一实施例中,对所述传动系统间隙进行匹配得到所述传动系统间隙对应的目标扭矩梯度修正值,包括:将所述传动系统间隙与多个预设传动系统间隙进行匹配,将一预设传动系统间隙确定为目标传动系统间隙;获取所述目标传动系统间隙所对应的预设扭矩梯度修正值,并确定为所述目标扭矩梯度修正值,其中,每一预设传动系统间隙均预先设置有对应的预设扭矩梯度修正值。
10、于本发明一实施例中,基于所述目标扭矩梯度修正值和预设基础过零扭矩梯度值确定所述车辆的当前扭矩过零梯度,包括:获取所述车辆的预设基础过零扭矩梯度值;将所述预设基础过零扭矩梯度值与所述目标扭矩梯度修正值的乘积确定为所述车辆的当前扭矩过零梯度。
11、本发明实施例还提供了一种电机扭矩过零控制装置,所述装置包括:启动控制模块,用于若车辆处于持续高速滑行状态,控制所述车辆的电机依次输出第一方向扭矩和第二方向扭矩,以使所述车辆的齿轮进行不同侧靠齿运动;传动系统间隙确定模块,用于采集不同侧靠齿运动过程中不同采集时刻的所述车辆的电机转子角速度和车辆轮胎转动角速度,并确定传动系统间隙;匹配模块,用于对所述传动系统间隙进行匹配得到所述传动系统间隙对应的目标扭矩梯度修正值;当前扭矩过零梯度确定模块,用于基于所述目标扭矩梯度修正值和预设基础过零扭矩梯度值确定所述车辆的当前扭矩过零梯度,以对所述车辆的电机进行扭矩过零控制。
12、本发明实施例还提供了一种新能源车辆,包括整车控制器、电机控制器、驱动电机和传动系统;所述电机控制器用于若车辆处于持续高速滑行状态,控制所述驱动电机依次输出第一方向扭矩和第二方向扭矩,以使所述车辆的齿轮进行不同侧靠齿运动,以及采集不同侧靠齿运动过程中不同采集时刻的所述车辆的电机转子角速度和车辆轮胎转动角速度,并确定传动系统间隙,将所述传动系统间隙发送至所述整车控制器;所述整车控制器用于接收所述传动系统间隙,对所述传动系统间隙进行匹配得到所述传动系统间隙对应的目标扭矩梯度修正值,基于所述目标扭矩梯度修正值和预设基础过零扭矩梯度值确定当前扭矩过零梯度,以对所述驱动电机进行扭矩过零控制。
13、本发明实施例还提供了一种电子设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如上述任一项实施例所述的方法。
14、本发明实施例还提供了一种计算机可读存储介质,计算机可读存储介质存储有计算机程序,计算机程序被处理器执行时实现上述任一项实施例所述的方法。
15、上述提供的电机扭矩过零控制方法、装置、车辆、电子设备及介质所实现的方案中,该方法通过在车辆处于持续高速滑行状态下,控制电机依次输出第一方向扭矩和第二方向扭矩,使得齿轮在不同侧靠齿运动,并采集这一过程中的电机转子角速度和车辆轮胎转动角速度,确定传动系统间隙,通过对该传动系统间隙进行匹配得到目标扭矩梯度修正值,进而基于目标扭矩梯度修正值和预设基础过零扭矩梯度值确定所述车辆的当前扭矩过零梯度,以对所述车辆的电机进行扭矩过零控制,通过在车辆行驶过程中当前扭矩过零梯度进行修正,针对每一辆车可以个性化的进行当前扭矩过零梯度的确定与修正,避免了固定扭矩过零梯度值导致的对同型号的其他车辆适配度不佳,也避免了由于车辆使用过程,导致传动系统发生变化,进而使得该固定的扭矩过零梯度值不再适用导致车辆异响的问题,避免了车辆在全生命周期内起步瞬间或者扭矩换向时的过零异响问题,使得动力系统输出扭矩平顺。提升了当前扭矩过零梯度的适配性,提升了动力系统输出扭矩的平顺性,提升了用户体验度。此外,在车辆行驶过程中进行当前扭矩过零梯度的修正,也避免了用户的停车等待,提升了用户体验度。
- 还没有人留言评论。精彩留言会获得点赞!