用于车辆的传感器控制方法、装置、系统和车辆与流程
本公开涉及自动驾驶,具体涉及一种用于车辆的传感器控制方法、装置、系统和车辆。
背景技术:
1、在自动驾驶技术领域中,通常会在车辆上安装各种类型的传感器,用于实时采集并分析车辆周围的各种环境数据并传输至车辆控制器,由车辆控制器进行融合处理,以感知环境中的障碍物。常用的车载传感器包括:可见光相机、激光雷达、补盲雷达、定位装置、惯性测量单元等。其中,可见光相机可能是固定帧率相机,而固定帧率相机为了能输出稳定帧率,在接收到图像采集的触发信号后可能不会立即开始进行曝光处理,导致相机实际开始采集图像数据的时间点与接收到触发信号的时间点不一致。
2、相关技术中,对固定帧率相机和其他传感器的同步触发效果不佳,导致不同数据在融合过程中可能存在时间维度的偏差,影响车辆对环境的感知准确性。
技术实现思路
1、本公开旨在至少在一定程度上解决相关技术中的技术问题之一。
2、为此,本公开的目的在于提出一种用于车辆的传感器控制方法、装置、系统、车辆和存储介质,能够有效提升对第一图像采集设备和目标传感器的控制效果,保证第一图像采集设备和目标传感器被触发后所获取的数据在时间维度的同步性,提升车辆对环境的感知准确性。
3、为达到上述目的,本公开第一方面实施例提出的用于车辆的传感器控制方法,所述车辆包括:第一图像采集设备和目标传感器;该方法包括:
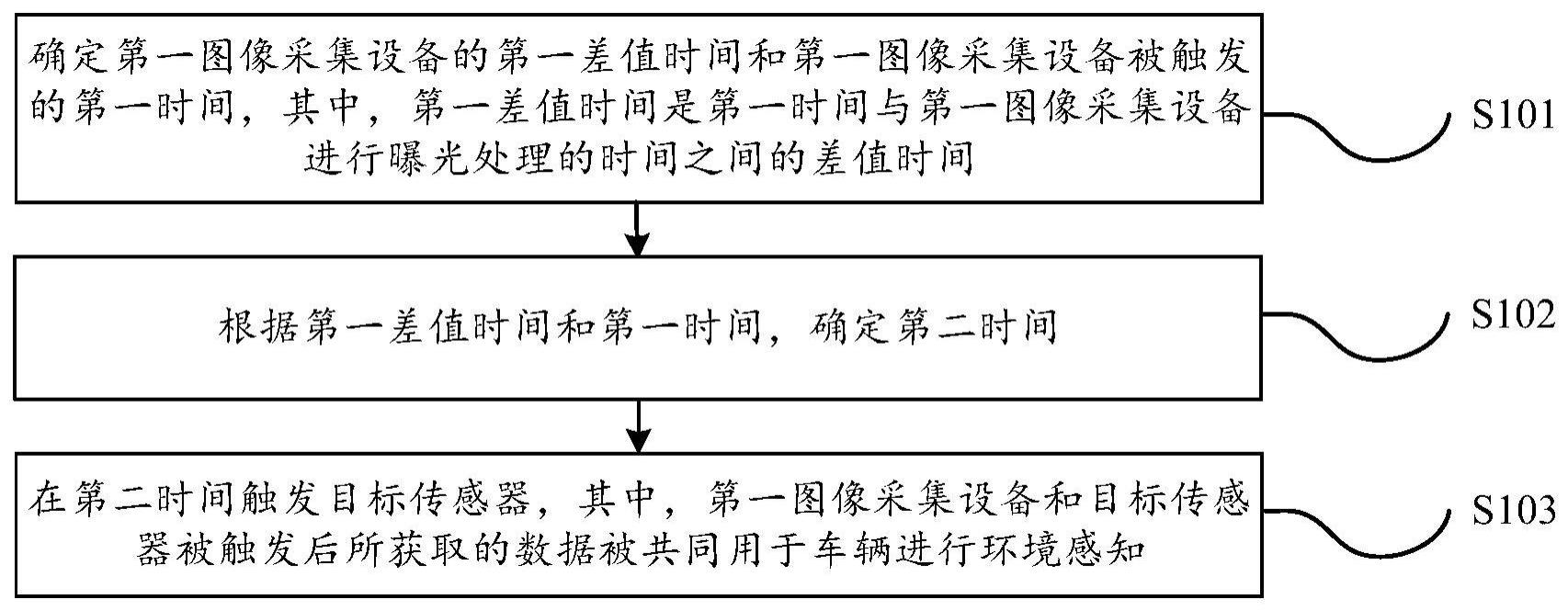
4、确定所述第一图像采集设备的第一差值时间和所述第一图像采集设备被触发的第一时间,其中,所述第一差值时间是所述第一时间与所述第一图像采集设备进行曝光处理的时间之间的差值时间;
5、根据所述第一差值时间和所述第一时间,确定第二时间;
6、在所述第二时间触发所述目标传感器,其中,所述第一图像采集设备和所述目标传感器被触发后所获取的数据被共同用于所述车辆进行环境感知。
7、为达到上述目的,本公开第二方面实施例提出的用于车辆的传感器控制装置,所述车辆包括:第一图像采集设备和目标传感器;该装置包括:
8、第一确定模块,用于确定所述第一图像采集设备的第一差值时间和所述第一图像采集设备被触发的第一时间,其中,所述第一差值时间是所述第一时间与所述第一图像采集设备进行曝光处理的时间之间的差值时间;
9、第二确定模块,用于根据所述第一差值时间和所述第一时间,确定第二时间;
10、触发模块,用于在所述第二时间触发所述目标传感器,其中,所述第一图像采集设备和所述目标传感器被触发后所获取的数据被共同用于所述车辆进行环境感知。
11、为达到上述目的,本公开第三方面实施例提出的用于车辆的传感器控制系统,包括:控制器、第一图像采集设备和目标传感器;其中,所述控制器用于:
12、确定所述第一图像采集设备的第一差值时间和所述第一图像采集设备被触发的第一时间,其中,所述第一差值时间是所述第一时间与所述第一图像采集设备进行曝光处理的时间之间的差值时间;
13、根据所述第一差值时间和所述第一时间,确定第二时间;
14、在所述第二时间触发所述目标传感器,其中,所述第一图像采集设备和所述目标传感器被触发后所获取的数据被共同用于所述车辆进行环境感知。
15、本公开第四方面实施例提出的车辆,包括:存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如本公开第一方面实施例提出的用于车辆的传感器控制方法。
16、本公开第五方面实施例提出了一种非临时性计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现如本公开第一方面实施例提出的用于车辆的传感器控制方法。
17、本公开第六方面实施例提出了一种计算机程序产品,当所述计算机程序产品中的指令由处理器执行时,执行如本公开第一方面实施例提出的用于车辆的传感器控制方法。
18、本公开提供的用于车辆的传感器控制方法、装置、系统和车辆,通过确定第一图像采集设备的第一差值时间和第一图像采集设备被触发的第一时间,其中,第一差值时间是第一时间与第一图像采集设备进行曝光处理的时间之间的差值时间,根据第一差值时间和第一时间,确定第二时间,在第二时间触发目标传感器,其中,第一图像采集设备和目标传感器被触发后所获取的数据被共同用于车辆进行环境感知,由此,能够有效提升对第一图像采集设备和目标传感器的控制效果,保证第一图像采集设备和目标传感器被触发后所获取的数据在时间维度的同步性,提升车辆对环境的感知准确性。
19、本公开附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本公开的实践了解到。
技术特征:
1.一种用于车辆的传感器控制方法,其特征在于,所述车辆包括:第一图像采集设备和目标传感器;其中,所述方法包括:
2.如权利要求1所述的方法,其特征在于,所述确定所述第一图像采集设备的第一差值时间,包括:
3.如权利要求1所述的方法,其特征在于,所述车辆包括多个候选图像采集设备,所述第一图像采集设备属于所述多个候选图像采集设备,所述方法还包括:
4.如权利要求3所述的方法,其特征在于,所述确定所述候选图像采集设备的第三差值时间,包括:
5.如权利要求3所述的方法,其特征在于,所述根据所述第三差值时间,从所述多个候选图像采集设备中确定所述第一图像采集设备,包括:
6.如权利要求5所述的方法,其特征在于,所述方法还包括:
7.如权利要求1所述的方法,其特征在于,所述车辆包括多个候选传感器,所述目标传感器属于所述多个候选传感器,所述方法还包括:
8.如权利要求7所述的方法,其特征在于,所述根据所述关联值,从所述多个候选传感器中确定所述目标传感器,包括:
9.一种用于车辆的传感器控制装置,其特征在于,所述车辆包括:第一图像采集设备和目标传感器;其中,所述装置包括:
10.一种用于车辆的传感器控制系统,其特征在于,包括:控制器、第一图像采集设备和目标传感器;其中,所述控制器用于:
11.如权利要求10所述的系统,其特征在于,所述系统还包括:全球定位系统gps接收器,所述gps接收器分别基于信号转换电路和第一电平转换电路与所述控制器相连;其中,
12.如权利要求11所述的系统,其特征在于,所述系统还包括:高精度晶振,所述高精度晶振与所述控制器相连;其中,
13.如权利要求10所述的系统,其特征在于,所述系统还包括与所述第一图像采集设备相连的解串器,所述解串器分别基于第一电路、第二电路以及第三电路与所述控制器相连,所述第一图像采集设备包括串行器,其中,
14.如权利要求10所述的系统,其特征在于,所述目标传感器用于在获取传感数据之后,基于隔离变压器和网络物理层phy将所述传感数据上报至所述控制器。
15.如权利要求10所述的系统,其特征在于,所述系统还包括:第二电平转换电路;其中,
16.一种车辆,其特征在于,包括:
17.一种存储有计算机指令的非瞬时计算机可读存储介质,其特征在于,其中,所述计算机指令用于使所述计算机执行权利要求1-8中任一项所述的方法。
18.一种计算机程序产品,其特征在于,包括计算机程序,所述计算机程序在被处理器执行时实现根据权利要求1-8中任一项所述方法的步骤。
技术总结
本公开提出一种用于车辆的传感器控制方法、装置、系统和车辆,车辆包括:第一图像采集设备和目标传感器,该方法包括:确定第一图像采集设备的第一差值时间和第一图像采集设备被触发的第一时间,其中,第一差值时间是第一时间与第一图像采集设备进行曝光处理的时间之间的差值时间,根据第一差值时间和第一时间,确定第二时间,在第二时间触发目标传感器,其中,第一图像采集设备和目标传感器被触发后所获取的数据被共同用于车辆进行环境感知,由此,能够有效提升对第一图像采集设备和目标传感器的控制效果,保证第一图像采集设备和目标传感器被触发后所获取的数据在时间维度的同步性,提升车辆对环境的感知准确性。
技术研发人员:许哲涛
受保护的技术使用者:北京京东乾石科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!