一种轨道车辆电机械制动系统
本发明涉及制动系统,具体是一种轨道车辆电机械制动系统。
背景技术:
1、目前,在轨道车辆制动系统中,常利用液压及气压作为动力源使得轨道车辆实现制动及长时间停放,上述制动系统存在以下缺点:第一,其结构复杂,需要大量的管路及复杂的控制系统;第二,在动力源失效的状态下,难以实现制动输出及长时间的稳定制动停放。随着时代的发展,传统的制动系统已无法满足智能化及可靠性要求,具备轻便和可靠性的轨道车辆制动系统已成为时代发展趋势。
技术实现思路
1、本发明的目的在于解决现有技术中存在的问题,提供了一种轨道车辆电机械制动系统。
2、本发明为实现上述目的,通过以下技术方案实现:
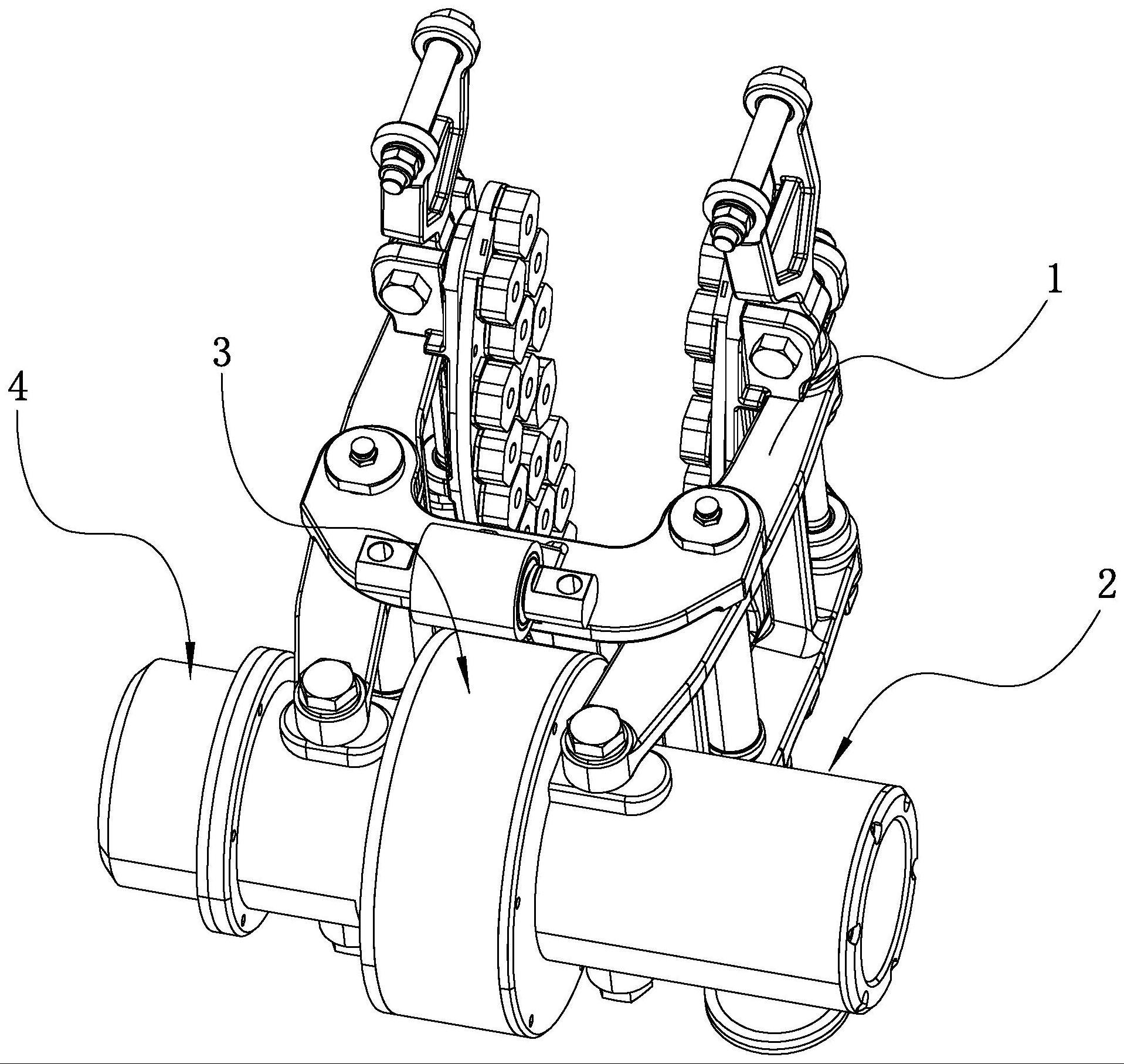
3、一种轨道车辆电机械制动系统,包括制动钳架,以及依次连接的动力装置、减速器和伸缩装置;
4、所述动力装置包括外壳,以及设置在所述外壳内部的主电机、副电机和棘轮锁定机构,所述主电机的输出端固定有主轴,所述主轴上固定有第一锥齿轮,所述副电机的输出端固定有与所述第一锥齿轮相捏合的第二锥齿轮;所述棘轮锁定机构包括棘轮和固定盘,所述棘轮固定在所述主轴上,所述固定盘与所述外壳固定,所述固定盘一侧设有棘爪,所述棘爪与所述固定盘之间设有弹簧,所述固定盘一侧还设有用于拨动所述棘爪使所述棘爪与棘轮分离的拨动爪,所述固定盘另一侧设有用于驱动所述拨动爪的驱动电机;
5、所述伸缩装置包括丝杠,以及滑动套接的内管和滑动套,所述内管固定有导向光轴,所述滑动套内固定有与所述导向光轴相配合的滑动件,所述滑动套内固定有与所述丝杠螺纹连接的丝杠螺母;
6、所述减速器的输入端与所述主轴连接、输出端与所述丝杠连接,所述减速器壳体分别与所述外壳和内管固定连接;所述制动钳架的两端分别与所述外壳和滑动套铰接。
7、优选地,所述主电机和副电机均为无刷电机。
8、优选地,所述棘爪和拨动爪均与所述固定盘转动连接。
9、优选地,所述棘爪、拨动爪和驱动电机均为中心对称设置的两个。
10、优选地,所述减速器为二级行星齿轮减速器。
11、优选地,所述滑动件为直线轴承。
12、优选地,所述导向光轴为对称设置的两个。
13、优选地,所述滑动套端部连接有端盖,所述端盖内设有与所述导向光轴端部间隙配合的第一轴套,以及与所述丝杠端部间隙配合的第二轴套。
14、对比现有技术,本发明的有益效果在于:
15、本发明的轨道车辆电机械制动系统,以电机为动力源,无需大量的管路及复杂的控制系统,通过电机-主轴-减速器-丝杠的传动,使伸缩装置伸缩,进而带动制动钳架开合,实现制动。并且在主电机的基础上设置有副电机,主电机和副电机均可驱动主轴转动,当主电机失效时,启动副电机,带动主轴转动,实现制动。另外动力装置内设有棘轮锁定机构,能够实现车辆长时间的稳定制动停放,当需要长时间的制动停放前,通过驱动电机驱动拨动爪,同时在弹簧的弹力作用下,棘爪与棘轮接触,使主轴只能单向转动,保证长时间制动停放的稳定性。
技术特征:
1.一种轨道车辆电机械制动系统,其特征在于,包括制动钳架,以及依次连接的动力装置、减速器和伸缩装置;
2.根据权利要求1所述的一种轨道车辆电机械制动系统,其特征在于:所述主电机和副电机均为无刷电机。
3.根据权利要求1所述的一种轨道车辆电机械制动系统,其特征在于:所述棘爪和拨动爪均与所述固定盘转动连接。
4.根据权利要求1所述的一种轨道车辆电机械制动系统,其特征在于:所述棘爪、拨动爪和驱动电机均为中心对称设置的两个。
5.根据权利要求1所述的一种轨道车辆电机械制动系统,其特征在于:所述减速器为二级行星齿轮减速器。
6.根据权利要求1所述的一种轨道车辆电机械制动系统,其特征在于:所述滑动件为直线轴承。
7.根据权利要求1所述的一种轨道车辆电机械制动系统,其特征在于:所述导向光轴为对称设置的两个。
8.根据权利要求1所述的一种轨道车辆电机械制动系统,其特征在于:所述滑动套端部连接有端盖,所述端盖内设有与所述导向光轴端部间隙配合的第一轴套,以及与所述丝杠端部间隙配合的第二轴套。
技术总结
本发明提供了一种轨道车辆电机械制动系统,包括制动钳架,以及依次连接的动力装置、减速器和伸缩装置;动力装置包括外壳、主电机、副电机和棘轮锁定机构,主电机的输出端固定有主轴,主轴上固定有第一锥齿轮,副电机的输出端固定有第二锥齿轮;棘轮锁定机构包括棘轮和固定盘,固定盘一侧设有棘爪,棘爪与固定盘之间设有弹簧,固定盘一侧还设有用于拨动棘爪使棘爪与棘轮分离的拨动爪,固定盘另一侧设有用于驱动拨动爪的驱动电机。本发明以电机为动力源,无需大量的管路及复杂的控制系统。并且在主电机的基础上设置副电机,主电机失效,启动副电机带动主轴实现制动。棘轮锁定机构能够实现车辆长时间的稳定制动停放,保证长时间制动停放的稳定性。
技术研发人员:王栋,马晓君,孟欣,陈广鹏,梁晨,费钰超,郭子昂,吴丹,苏文献,宋伟
受保护的技术使用者:佳木斯大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!