一种坡道辅助控制方法、装置、设备及存储介质与流程
本发明涉及智能驾驶,尤其涉及一种坡道辅助控制方法、装置、设备及存储介质。
背景技术:
1、汽车坡道辅助是一种现代化的技术,它可以帮助驾驶员在坡道上更加轻松地控制车辆,避免车辆滑坡或者熄火等情况发生。
2、现有技术中一般仅凭借车辆行驶参数进行坡道辅助控制,会导致违背驾驶员意图的情况出现,影响驾驶员的驾驶体验。
技术实现思路
1、本发明提供了一种坡道辅助控制方法、装置、设备及存储介质,以结合驾驶员的驾驶意图、车辆行驶参数进行坡道辅助控制,提升驾驶员的驾驶体验。
2、第一方面,本发明提供了一种坡道辅助控制方法,包括:
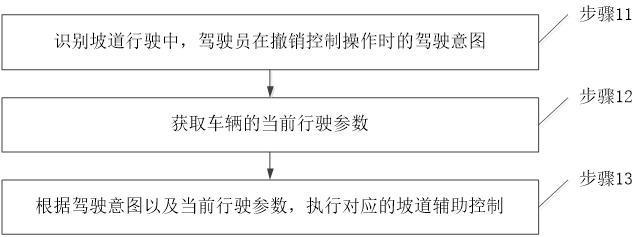
3、识别坡道行驶中,驾驶员在撤销控制操作时的驾驶意图;
4、获取车辆的当前行驶参数;
5、根据所述驾驶意图以及所述当前行驶参数,执行对应的坡道辅助控制。
6、可选的,所述识别坡道行驶中,驾驶员在撤销控制操作时的驾驶意图包括:
7、获取车辆的行驶状态以及上一时刻驾驶员的控制操作;
8、根据所述车辆的行驶状态以及所述上一时刻驾驶员的控制操作,确定驾驶员在撤销控制操作时的驾驶意图。
9、可选的,所述根据所述车辆的行驶状态以及所述上一时刻驾驶员的控制操作,确定驾驶员在撤销控制操作时的驾驶意图包括:
10、获取到车辆的行驶状态为下坡状态,且上一时刻驾驶员的控制操作为加速控制或减速控制时,确定驾驶员在撤销控制操作时的驾驶意图为保持期望速度匀速行驶;
11、获取到车辆的行驶状态为上坡状态,且上一时刻驾驶员的控制操作为减速控制时,确定驾驶员在撤销控制操作时的驾驶意图为减速驻车。
12、可选的,所述根据所述驾驶意图以及所述当前行驶参数,执行对应的坡道辅助控制包括:
13、当驾驶员在撤销控制操作时的驾驶意图为保持期望速度匀速行驶,且车辆的当前行驶参数中的车速与目标速度的差值绝对值大于差值阈值时,确定对应的辅助控制变化量,根据所述辅助控制变化量调节实际控制量,实现坡道辅助控制;
14、当驾驶员在撤销控制操作时刻的驾驶意图为减速驻车,且车辆的当前行驶参数中的车速小于速度阈值时,获取对应的辅助控制变化量,根据所述辅助制动变化量调节实际控制量,实现坡道辅助控制。
15、可选的,所述获取对应的辅助控制变化量包括:
16、利用模糊自适应控制器获取对应的辅助控制变化量。
17、可选的,所述执行对应的坡道辅助控制之后,还包括:
18、检测到驾驶员的任意控制操作,退出所述坡道辅助控制。
19、可选的,坡道辅助控制方法还包括:
20、获取到车辆的行驶状态为坡道驻车,且沿坡道方向的加速度不为0时,增大驻车制动力至所述加速度为0;
21、检测到驾驶员的任意控制操作退出控制。
22、第二方面,本发明还提供了一种坡道辅助控制装置,包括:
23、意图识别模块,用于识别坡道行驶中,驾驶员在撤销控制操作时的驾驶意图;
24、参数获取模块,用于获取车辆的当前行驶参数;
25、控制执行模块,用于根据所述驾驶意图以及所述当前行驶参数,执行对应的坡道辅助控制。
26、第三方面,本发明还提供了一种设备,所述设备包括:
27、一个或多个处理器;
28、存储装置,用于存储一个或多个程序,
29、当所述一个或多个程序被所述一个或多个处理器执行,使得所述一个或多个处理器实现如第一方面所述的坡道辅助控制方法。
30、第四方面,本发明还提供了一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现如第一方面所述的坡道辅助控制方法。
31、本发明实施例提供的技术方案,通过识别坡道行驶中,驾驶员在撤销控制操作时的驾驶意图,获取车辆的当前行驶参数,根据驾驶意图以及当前行驶参数,执行对应的坡道辅助控制,实现了结合驾驶员的驾驶意图、车辆行驶参数进行坡道辅助控制,提升驾驶员的驾驶体验。
技术特征:
1.一种坡道辅助控制方法,其特征在于,包括:
2.根据权利要求1所述的坡道辅助控制方法,其特征在于,所述识别坡道行驶中,驾驶员在撤销控制操作时的驾驶意图包括:
3.根据权利要求2所述的坡道辅助控制方法,其特征在于,所述根据所述车辆的行驶状态以及所述上一时刻驾驶员的控制操作,确定驾驶员在撤销控制操作时的驾驶意图包括:
4.根据权利要求3所述的坡道辅助控制方法,其特征在于,所述根据所述驾驶意图以及所述当前行驶参数,执行对应的坡道辅助控制包括:
5.根据权利要求4所述的坡道辅助控制方法,其特征在于,所述获取对应的辅助控制变化量包括:
6.根据权利要求1所述的坡道辅助控制方法,其特征在于,所述执行对应的坡道辅助控制之后,还包括:
7.根据权利要求1所述的坡道辅助控制方法,其特征在于,还包括:
8.一种坡道辅助控制装置,其特征在于,包括:
9.一种电子设备,其特征在于,所述设备包括:
10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,该程序被处理器执行时实现如权利要求1-7中任一所述的坡道辅助控制方法。
技术总结
本发明提供一种坡道辅助控制方法、装置、设备及存储介质。所述坡道辅助控制方法包括:识别坡道行驶中,驾驶员在撤销控制操作时的驾驶意图,获取车辆的当前行驶参数,根据所述驾驶意图以及所述当前行驶参数,执行对应的坡道辅助控制。本发明实施例提供的技术方案,实现了结合驾驶员的驾驶意图、车辆行驶参数进行坡道辅助控制,提升驾驶员的驾驶体验。
技术研发人员:徐显杰,齐剑
受保护的技术使用者:天津所托瑞安汽车科技有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!