泊车方法、泊车装置、计算设备和存储介质与流程
本发明涉及自动泊车,具体地,涉及一种泊车方法、泊车装置、计算设备和存储介质。
背景技术:
1、随着融合泊车、记忆泊车等越来越多的车位识别和自动泊车技术得到很大的提高,越来越多的厂商更加愿意使用和青睐自动泊车技术产品。当用户选择任意一个检测到的待泊车位时,如何保证本车辆能够居中停靠在所选中的待泊车位内变得越来越重要,直接影响自动泊车产品的性能和质量。
2、对于自动泊车,现有技术中通常根据以下内容进行处理。选择一个待泊车位,使用被选择的待泊车位进行航迹推算来跟踪其与车辆的相对位置,规划路径进行泊车。待泊车位与车辆的相对位置的更新始终是使用航迹推算来做的,这个可能会导致更新的车位位置与实际场景的车位位置有误差,最终泊车完成后,车辆不能居中停靠待泊车位中,甚至出现车轮压线的情况。尤其是在车辆在狭小空间泊车或者是路面不平滑(有限速带等)情况下,车辆调整步数过多,航迹推算得到的车位与实际场景车位出入更多,车辆更加不能居中停靠。
技术实现思路
1、本发明实施例的目的是提供一种泊车方法、泊车装置、计算设备和存储介质。
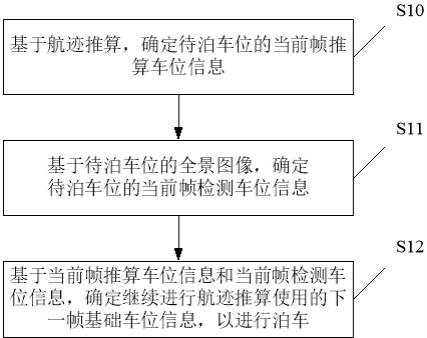
2、第一方面,本发明实施例提供一种泊车方法,该泊车方法包括:基于航迹推算,确定待泊车位的当前帧推算车位信息;基于待泊车位的全景图像,确定待泊车位的当前帧检测车位信息;以及基于当前帧推算车位信息和当前帧检测车位信息,确定继续进行航迹推算使用的下一帧基础车位信息,以进行泊车。
3、可选地,基于当前帧推算车位信息和当前帧检测车位信息确定继续进行航迹推算使用的下一帧基础车位信息包括:基于当前帧推算车位信息和当前帧检测车位信息,确定当前帧推算车位和当前帧检测车位的重合程度,其中,当前帧推算车位对应于当前帧推算车位信息,当前帧检测车位对应于当前帧检测车位信息;以及基于所确定的重合程度,确定下一帧基础车位信息。
4、可选地,基于所确定的重合程度确定下一帧基础车位信息包括:在所确定的重合程度未超过预设重合条件的情况下,将当前帧推算车位信息确定为下一帧基础车位信息;以及在所确定的重合程度超过预设重合条件的情况下,将当前帧检测车位信息确定为下一帧基础车位信息。
5、可选地,重合程度基于交并比而被确定。
6、可选地,当前帧推算车位信息、当前帧检测车位信息和下一帧基础车位信息包括车位角点的坐标信息。
7、可选地,基于待泊车位的全景图像确定待泊车位的当前帧检测车位信息包括:基于预设深度学习模型对全景图像进行检测,确定当前帧检测车位信息。
8、可选地,在当前帧检测车位信息包括车位角点的坐标信息的情况下,预设深度学习模型包括深度学习车位实例分割模型和/或深度学习车位角点检测模型。
9、可选地,在预设深度学习模型包括深度学习车位实例分割模型和深度学习车位角点检测模型的情况下,基于预设深度学习模型对全景图像进行检测确定当前帧检测车位信息包括:若仅深度学习车位实例分割模型能够基于全景图像检测到待泊车位,则将第一当前帧检测车位信息确定为当前帧检测车位信息,其中,第一当前帧检测车位信息基于深度学习车位实例分割模型对全景图像进行检测而被确定;和/或若仅深度学习车位角点检测模型能够基于全景图像检测到待泊车位,则将第二当前帧检测车位信息确定为当前帧检测车位信息,其中,第二当前帧检测车位信息基于深度学习车位角点检测模型对全景图像进行检测而被确定;和/或若深度学习车位实例分割模型和深度学习车位角点检测模型均能够基于全景图像检测到待泊车位,则基于第一当前帧检测车位和第二当前帧检测车位分别与当前帧推算车位的重合程度,确定当前帧检测车位信息,其中,第一当前帧检测车位对应于第一当前帧检测车位信息,第二当前帧检测车位对应于第二当前帧检测车位信息,当前帧推算车位对应于当前帧推算车位信息。
10、可选地,在基于深度学习车位实例分割模型仅能得到三条车位线信息和基于深度学习车位角点检测模型仅能得到两组坐标信息或三组坐标信息的情况下,基于预设深度学习模型对全景图像进行检测确定当前帧检测车位信息包括:在预设深度学习模型仅包括深度学习车位实例分割模型的情况下,基于三条车位线信息和待泊车位的长度或宽度及角度,确定出第一四组坐标信息,将第一四组坐标信息确定为当前帧检测车位信息;在预设深度学习模型仅包括深度学习车位角点检测模型的情况下,基于两组坐标信息或三组坐标信息和待泊车位的长度或宽度及角度,确定出第二四组坐标信息,将第二四组坐标信息确定为当前帧检测车位信息;以及在预设深度学习模型包括深度学习车位实例分割模型和深度学习车位角点检测模型的情况下,基于三条车位线信息和待泊车位的长度或宽度及角度,确定出第一四组坐标信息;基于两组坐标信息或三组坐标信息和待泊车位的长度或宽度及角度,确定出第二四组坐标信息;以及基于第一四组坐标信息和第二四组坐标信息,确定当前帧检测车位信息。
11、第二方面,本发明实施例还提供一种泊车装置,该泊车装置包括:推算模块,用于基于航迹推算,确定待泊车位的当前帧推算车位信息;检测模块,用于基于待泊车位的全景图像,确定待泊车位的当前帧检测车位信息;以及下一帧基础车位信息确定模块,用于基于当前帧推算车位信息和当前帧检测车位信息,确定继续进行航迹推算使用的下一帧基础车位信息,以进行泊车。
12、第三方面,本发明实施例还提供一种计算设备,该计算设备包括:处理器和存储器;其中,存储器与处理器连接,存储器用于存储计算机程序;处理器,用于通过运行存储器中存储的计算机程序,实现上述的泊车方法。
13、第四方面,本发明实施例还提供一种存储介质,所述存储介质上存储有计算机程序,计算机程序被处理器运行时,实现上述的泊车方法。
14、通过上述技术方案,基于根据航迹推算得到的当前帧推算车位信息和根据待泊车位的全景图像得到的当前帧检测车位信息,确定出下一帧进行航迹推算使用的下一帧基础车位信息,从而进行泊车,如此,在泊车的过程中不仅仅基于航迹推算更新待泊车位与车辆的相对位置,考虑到了从视觉角度获取到的全景图像,使得对待泊车位与车辆的相对位置的更新更加贴合实际,缓解了因航迹推算导致误差累积而使得车辆不能居中停靠甚至车轮压线的情况,使得车辆尽量居中停靠。
15、本发明的其他特征和优点将在随后的具体实施方式予以详细说明。
技术特征:
1.一种泊车方法,其特征在于,该泊车方法包括:
2.根据权利要求1所述的泊车方法,其特征在于,基于所述当前帧推算车位信息和所述当前帧检测车位信息确定继续进行所述航迹推算使用的下一帧基础车位信息包括:
3.根据权利要求2所述的泊车方法,其特征在于,基于所确定的重合程度确定所述下一帧基础车位信息包括:
4.根据权利要求2所述的泊车方法,其特征在于,所述重合程度基于交并比而被确定。
5.根据权利要求1-4中任一项所述的泊车方法,其特征在于,所述当前帧推算车位信息、所述当前帧检测车位信息和所述下一帧基础车位信息包括车位角点的坐标信息。
6.根据权利要求1所述的泊车方法,其特征在于,基于所述待泊车位的全景图像确定所述待泊车位的当前帧检测车位信息包括:
7.根据权利要求6所述的泊车方法,其特征在于,在所述当前帧检测车位信息包括车位角点的坐标信息的情况下,所述预设深度学习模型包括深度学习车位实例分割模型和/或深度学习车位角点检测模型。
8.根据权利要求7所述的泊车方法,其特征在于,在所述预设深度学习模型包括所述深度学习车位实例分割模型和所述深度学习车位角点检测模型的情况下,基于预设深度学习模型对所述全景图像进行检测确定所述当前帧检测车位信息包括:
9.根据权利要求7所述的泊车方法,其特征在于,在基于所述深度学习车位实例分割模型仅能得到三条车位线信息和基于所述深度学习车位角点检测模型仅能得到两组坐标信息或三组坐标信息的情况下,基于预设深度学习模型对所述全景图像进行检测确定所述当前帧检测车位信息包括:
10.一种泊车装置,其特征在于,该泊车装置包括:
11.一种计算设备,其特征在于,该计算设备包括:处理器和存储器;
12.一种存储介质,其特征在于,所述存储介质上存储有计算机程序,所述计算机程序被处理器运行时,实现权利要求1-9中任一项所述的泊车方法。
技术总结
本发明涉及自动泊车技术领域,公开了一种泊车方法、泊车装置、计算设备和存储介质。泊车方法包括基于航迹推算,确定待泊车位的当前帧推算车位信息;基于待泊车位的全景图像,确定待泊车位的当前帧检测车位信息;以及基于当前帧推算车位信息和当前帧检测车位信息,确定继续进行航迹推算使用的下一帧基础车位信息,以进行泊车。籍此,实现了缓解了因航迹推算导致误差累积而使得车辆不能居中停靠甚至车轮压线的情况,使得车辆尽量居中停靠。
技术研发人员:曹建收,杨波,王东虎,王学忠,刘春霞
受保护的技术使用者:北京茵沃汽车科技有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!