一种基于视觉的车内环境调节方法与流程
本发明涉及图像处理,具体涉及一种基于视觉的车内环境调节方法。
背景技术:
1、在汽车行驶的过程中,如果进入工业区、沙尘飘扬的区域或其他空气质量较为恶劣的环境中时,需要人工手动关闭汽车的外循环、打开内循环、关闭车窗,这些操作可以避免灰尘进入车内,保持车内空气清洁,减少对人体健康的影响,同时,还可以隔绝路面噪音,提高行车过程中车内乘客的舒适性。座椅、车窗、空调等共同组成汽车内部环境是反映汽车舒适度的重要特征之一,而传统的汽车的座椅、车窗、空调等设备的调节需要车内成员手动独立控制,在调整的过程中,往往需要分散驾驶人员的注意力,为了继续提高行车过程中的安全性和舒适性,需要一种安全、人性化和智能的车内环境调节技术,在车辆即将进入烟尘环境时实现车内环境的自动调控。
2、目前,可以使用机器视觉获取车辆周围的图像,当车辆周围环境中出现烟尘时,通过机器视觉识别出烟尘影响下的车辆周围的实际环境,但是,无法对烟尘对车辆所处环境的影响程度进行判断,更无法实现车内环境的自用调控,所以,需要一种可以根据车辆周围环境的图像实现车内环境自动调节的方法。
技术实现思路
1、本发明提供一种基于视觉的车内环境调节方法,以解决现有的车内环境调节基于车内成员手动独立控制的问题,所采用的技术方案具体如下:
2、本发明一个实施例提供了一种基于视觉的车内环境调节方法,该方法包括以下步骤:
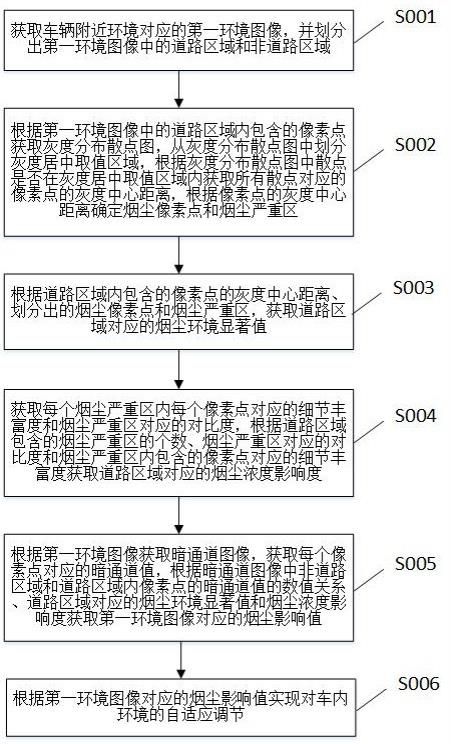
3、获取车辆附近环境对应的第一环境图像,并划分出第一环境图像中的道路区域和非道路区域;
4、根据第一环境图像中的道路区域内包含的像素点获取灰度分布散点图,从灰度分布散点图中划分灰度居中取值区域,根据灰度分布散点图中散点是否在灰度居中取值区域内获取所有散点对应的像素点的灰度中心距离,根据像素点的灰度中心距离确定烟尘像素点和烟尘严重区;
5、根据道路区域内包含的像素点的灰度中心距离、划分出的烟尘像素点和烟尘严重区,获取道路区域对应的烟尘环境显著值;
6、获取每个烟尘严重区内每个像素点对应的细节丰富度和烟尘严重区对应的对比度,根据道路区域包含的烟尘严重区的个数、烟尘严重区对应的对比度和烟尘严重区内包含的像素点对应的细节丰富度获取道路区域对应的烟尘浓度影响度;
7、根据第一环境图像获取暗通道图像,获取每个像素点对应的暗通道值,根据暗通道图像中非道路区域和道路区域内像素点的暗通道值的数值关系、道路区域对应的烟尘环境显著值和烟尘浓度影响度获取第一环境图像对应的烟尘影响值;
8、根据第一环境图像对应的烟尘影响值实现对车内环境的自适应调节。
9、进一步,所述获取车辆附近环境对应的第一环境图像,并划分出第一环境图像中的道路区域和非道路区域,包括的具体方法为:
10、在汽车的多个预设位置设置相机,校正每个摄像机拍摄的方位,每间隔第一预设阈值时间使用相机获取一次图像,将获取的图像记为第一环境图像;
11、对第一环境图像使用预设去噪算法进行去噪;
12、使用目标检测模型识别出第一环境图像中的道路对应的区域,选择道路对应的区域内目标通道的像素值小于等于第二预设阈值的像素点,将选取的像素点组成的区域记为道路区域,其中,第二预设阈值用于限定车辆周围环境的监测范围;
13、将第一环境图像中不在道路区域内、且设定通道的像素值小于等于第二预设阈值的所有像素点组成的区域记为非道路区域。
14、进一步,所述根据第一环境图像中的道路区域内包含的像素点获取灰度分布散点图,包括的具体方法为:
15、将第一环境图像转换为第一环境灰度图像;
16、分别以第一环境灰度图像中道路区域内包含的每个像素点为中心像素点建立第一预设大小窗口,将窗口内包含的像素点的灰度值的均值记为中心像素点的邻域均值;
17、以像素点对应的邻域均值为横坐标,以像素点对应的灰度值为纵坐标,获取第一环境图像中道路区域对应的灰度分布散点图,在灰度分布散点图中标记出第一环境图像中道路区域内包含的所有像素点对应的散点。
18、进一步,所述从灰度分布散点图中划分灰度居中取值区域,包括的具体方法为:
19、从灰度分布散点图的原点出发,向第一象限作与横轴正方向为预设夹角的射线,取射线上两个预设定点,取射线上两个预设定点之间的线段,分别以线段上包含的每个像素点为中心像素点建立第二预设大小窗口,将第二预设大小窗口内包含的所有像素点组成的区域记为灰度居中取值区域。
20、进一步,所述根据灰度分布散点图中散点是否在灰度居中取值区域内获取所有散点对应的像素点的灰度中心距离,根据像素点的灰度中心距离确定烟尘像素点和烟尘严重区,包括的具体方法为:
21、将灰度分布散点图中灰度居中取值区域内的散点对应的像素点的灰度中心距离记为第一预设常数;
22、获取分布散点图中不在灰度居中取值区域内的散点,分别取每个散点作为待分析散点,获取待分析散点与灰度居中取值区域内每个像素点之间的欧氏距离,取获取的欧氏距离的最小值作为待分析散点对应的像素点的灰度中心距离;
23、对所有散点对应的像素点的灰度中心距离进行聚类,获取多个聚类簇;
24、获取每个聚类簇内包含的灰度中心距离的均值,将均值最小的簇内包含的所有灰度中心距离对应的像素点标记为烟尘像素点;
25、对烟尘像素点组成的区域进行连通域分析,将获取的连通域标记为烟尘严重区。
26、进一步,所述道路区域对应的烟尘环境显著值,获取的具体方法为:
27、获取道路区域中烟尘像素点的个数占道路区域内包含的像素点个数的比值,将获取的比值记为第一比值;
28、分别将道路区域中每个烟尘严重区作为待分析烟尘严重区域,获取待分析烟尘严重区内所有像素点对应的灰度中心距离的均值和所有像素点对应的灰度中心距离的最大值,将所有像素点对应的灰度中心距离的最大值与所有像素点对应的灰度中心距离的均值的差值记为待分析烟尘严重区的第一差值;
29、将道路区域中每个烟尘严重区的第一差值的均值记为第一均值;
30、将第一均值与第一比值的乘积记为道路区域对应的烟尘环境显著值。
31、进一步,所述获取每个烟尘严重区内每个像素点对应的细节丰富度,包括的具体方法为:
32、分别以每个烟尘严重区内每个像素点为中心像素点建立第一预设大小窗口,取窗口内包含的像素点对应的信息熵,将信息熵记为中心像素点的细节丰富度。
33、进一步,所述烟尘浓度影响度获取的具体方法为:
34、
35、式中,为道路区域对应的烟尘浓度影响度;为道路区域包含的第个烟尘严重区内包含的像素点个数,其中,;为路区域包含的烟尘严重区的个数;为道路区域包含的所有烟尘严重区内包含的像素点的总个数;为第个烟尘严重区对应的对比度;为第个烟尘严重区包含的像素点对应的细节丰富度的均值;为归一化函数。
36、进一步,所述根据第一环境图像获取暗通道图像,获取每个像素点对应的暗通道值,根据暗通道图像中非道路区域和道路区域内像素点的暗通道值的数值关系、道路区域对应的烟尘环境显著值和烟尘浓度影响度获取第一环境图像对应的烟尘影响值,包括的具体方法为:
37、对第一环境图像使用暗通道算法获取暗通道图像,获取每个像素点对应的暗通道值;
38、将道路区域包含的所有像素点对应的暗通道值的均值记为第二均值;
39、对非道路区域中包含的所有像素点对应的暗通道值使用自适应阈值分割算法,获取自适应划分阈值,选取非道路区域内暗通道值大于等于自适应划分阈值的像素点,将选取的像素点对应的暗通道值的均值记为第三均值;
40、当第三均值大于等于第二均值时,将第三均值与第二均值的比值记为第二比值,将第二比值与道路区域对应的烟尘环境显著值和烟尘浓度影响度的乘积记为第一环境图像对应的烟尘影响值;
41、当第三均值小于第二均值时,将道路区域对应的烟尘环境显著值和烟尘浓度影响度的乘积作为第一环境图像对应的烟尘影响值。
42、进一步,所述烟尘影响值获取的具体方法为:
43、
44、式中,为第一环境图像对应的烟尘影响值;为道路区域对应的烟尘环境显著值;为道路区域对应的烟尘浓度影响度;为第三均值;为第二均值;为第二预设常数。
45、本发明的有益效果是:
46、本发明通过摄像机获取车辆周围环境的第一环境图像,并划分出第一环境图像中的道路区域和非道路区域;首先,对道路区域进行分析,根据烟尘的存在会使图像中道路对应的像素点灰度值分布趋近于灰度值取值范围内较为居中的位置,获取道路区域内包含的像素点的灰度中心距离,划分出的烟尘像素点和烟尘严重区,根据获取的这些指标得到道路区域对应的烟尘环境显著值;其次,根据车辆周围的环境处于烟尘中时获取的图像对比度会降低、细节信息会出现模糊的特征,获取道路区域对应的烟尘浓度影响度;然后,根据非道路区域烟尘浓度对道路区域烟尘浓度的影响和道路区域对应的烟尘环境显著值以及烟尘浓度影响度,获取第一环境图像对应的烟尘影响值,在分析的过程中,不仅考虑到烟尘的存在对图像中像素值分布的影响和烟尘的浓度对图像质量的影响,还结合非道路区域烟尘浓度对道路区域烟尘浓度的影响判断车辆是否即将驶入烟尘影响的环境;最后,根据烟尘影响值实现对车内环境的自适应调节,可帮助车辆保持车内环境的清洁安静,提高行车过程中车内乘客的舒适性。
- 还没有人留言评论。精彩留言会获得点赞!