制动控制方法、装置、电子设备及工程机械与流程
本申请涉及车辆制动,具体涉及一种制动控制方法、装置、电子设备及工程机械。
背景技术:
1、传统方案中,工程机械(或者说施工设备)通常会利用液压马达可以反拖实现制动。当采用电机替换液压马达作为行驶驱动后,工程机械无法直接利用液压系统的反拖实现制动,且工程机械由液压轮边直驱变为电机直驱后无机械刹车,减速机制动只作为驻车和应急刹车。但是,工程机械采用电机替换液压马达作为行驶驱动时,行驶制动中会产生制动回馈能量(或者说回馈功率),在储能器件例如电池的储能已达到预设阈值的情况下,可能会产生溢出的回馈能量,若无法将溢出的回馈能量消耗掉,则可能会出现储能器件过充的情况。
2、现有技术中,通常会在储能器件的储能已达到预设阈值的情况下,通过耗能器件来消耗溢出的回馈能量,以避免出现储能器件因电量过充导致损耗的情况。但是,回馈能量可能多也可能少,在有回馈能量溢出时,溢出的回馈能量同样可能多也可能少,如何消耗全部回馈能量成为当前亟待解决的问题。
技术实现思路
1、基于上述现有技术的缺陷和不足,本申请提出一种制动控制方法、装置、电子设备及工程机械,能够提供基于斩波制动系统的制动子系统中是否有功率溢出,控制斩波制动系统工作的方案,实现制动回馈功率的全部消耗。
2、根据本申请实施例的第一方面,提供了一种制动控制方法,应用于斩波制动系统,所述斩波制动系统包括斩波子系统和制动子系统,所述斩波子系统包括斩波控制器与功率电阻,所述制动子系统包括动力电池、电机控制器与电机。所述制动控制方法包括:
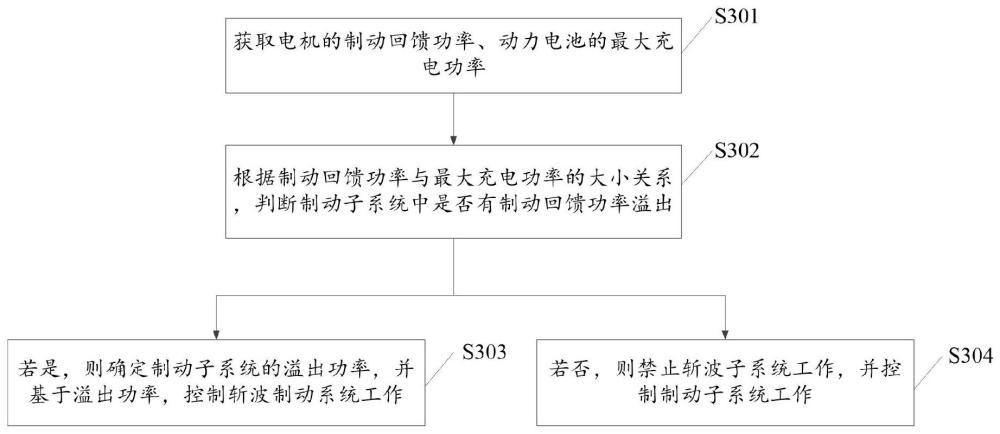
3、获取所述电机的制动回馈功率、所述动力电池的最大充电功率;
4、根据所述制动回馈功率与所述最大充电功率的大小关系,判断所述制动子系统中是否有制动回馈功率溢出;
5、若是,则确定所述制动子系统的溢出功率,并基于所述溢出功率,控制所述斩波制动系统工作;
6、若否,则禁止所述斩波子系统工作,并控制所述制动子系统工作。
7、根据本申请实施例的第二方面,提供了一种制动控制装置,应用于斩波制动系统,所述斩波制动系统包括斩波子系统和制动子系统,所述斩波子系统包括斩波控制器与功率电阻,所述制动子系统包括动力电池、电机控制器与电机。所述制动控制装置包括:
8、获取模块,用于获取所述电机的制动回馈功率、所述动力电池的最大充电功率;
9、判断模块,用于根据所述制动回馈功率与所述最大充电功率的大小关系,判断所述制动子系统中是否有制动回馈功率溢出;
10、第一控制模块,用于若是,则确定所述制动子系统的溢出功率,并基于所述溢出功率,控制所述斩波制动系统工作;
11、第二控制模块,用于若否,则禁止所述斩波子系统工作,并控制所述制动子系统工作。
12、根据本申请实施例的第三方面,提供了一种电子设备,包括存储器和处理器;
13、所述存储器与所述处理器连接,用于存储程序;
14、所述处理器用于通过运行所述存储器中的程序,实现如第一方面所述的制动控制方法。
15、根据本申请实施例的第四方面,提供了一种工程机械,所述工程机械中设置有如第二方面所述的制动控制装置或如第三方面所述的电子设备。
16、上述制动控制方法、装置、电子设备及工程机械中,可以根据电机的制动回馈功率与动力电池的最大充电功率的大小关系,判断制动子系统中是否有制动回馈功率溢出,若是,则基于溢出功率控制斩波制动系统工作,若否,则禁止斩波子系统工作,并控制制动子系统工作。这样,本申请提供了一种基于制动回馈功率、最大充电功率来控制斩波制动系统工作,以消耗制动回馈功率的方案,且该方案中,在制动子系统中没有功率溢出时,禁止斩波子系统工作,可减少资源浪费,在制动子系统中有功率溢出时,基于溢出功率控制斩波制动系统工作,较好地消耗掉制动子系统的溢出功率,实现全部制动回馈功率的消耗,避免出现制动子系统中的动力电池过充的情况。
技术特征:
1.一种制动控制方法,其特征在于,应用于斩波制动系统,所述斩波制动系统包括斩波子系统和制动子系统,所述斩波子系统包括斩波控制器与功率电阻,所述制动子系统包括动力电池、电机控制器与电机,所述制动控制方法包括:
2.根据权利要求1所述的制动控制方法,其特征在于,基于所述溢出功率,控制所述斩波制动系统工作,包括:
3.根据权利要求2所述的制动控制方法,其特征在于,
4.根据权利要求3所述的制动控制方法,其特征在于,所述基于所述施工功率以及所述溢出功率,控制所述斩波制动系统工作,包括:
5.根据权利要求3所述的制动控制方法,其特征在于,基于所述溢出功率以及所述斩波子系统的最大消耗功率,控制所述斩波制动系统工作,包括:
6.根据权利要求5所述的制动控制方法,其特征在于,
7.根据权利要求6所述的制动控制方法,其特征在于,判断所述制动距离是否满足安全距离,包括:
8.一种制动控制装置,其特征在于,应用于斩波制动系统,所述斩波制动系统包括斩波子系统和制动子系统,所述斩波子系统包括斩波控制器与功率电阻,所述制动子系统包括动力电池、电机控制器与电机,所述制动控制装置包括:
9.一种电子设备,其特征在于,包括存储器和处理器;
10.一种工程机械,其特征在于,所述工程机械中设置有如权利要求8所述的制动控制装置或者如权利要求9所述的电子设备。
技术总结
本申请提供了一种制动控制方法、装置、电子设备及工程机械,该制动控制方法应用于斩波制动系统,斩波制动系统中包括斩波子系统与制动子系统,根据电机的制动回馈功率与动力电池的最大充电功率的大小关系,判断制动子系统中是否有制动回馈功率溢出,若是,则基于溢出功率控制斩波制动系统工作,若否,则禁止斩波子系统工作,并控制制动子系统工作。这样,本申请提供了一种基于制动回馈功率、最大充电功率来控制斩波制动系统工作,以消耗制动回馈功率的方案,在没有功率溢出时,禁止斩波子系统工作,减少资源浪费,在有功率溢出时,基于溢出功率控制斩波制动系统工作,可较好地消耗掉溢出功率,实现全部制动回馈功率的消耗。
技术研发人员:陈日,黄芝友,章震
受保护的技术使用者:湖南三一华源机械有限公司
技术研发日:
技术公布日:2024/4/7
- 还没有人留言评论。精彩留言会获得点赞!