用于提高车辆辅助驾驶功能安全性的避让控制方法及系统与流程
本发明属于驾驶辅助领域,具体涉及一种用于提高车辆辅助驾驶功能安全性的避让控制方法及系统。
背景技术:
1、随着汽车驾驶功能的发展以及汽车性能的提升,目前市场上的一些车辆配置了可以自动控制车辆按照预设的巡航车速保持在车道中间行驶的功能,由于不同的汽车厂商有不同的叫法,有的叫做lcc,也有的叫lcw、lka(lane keep assist,车道辅助系统),中文名字叫做车道居中辅助系统或者车道保持辅助系统,当车辆居中行驶时,尤其是当自车以较高的速度行驶在左侧车道,而右侧是速度较慢的大货车时,或者是当自车行驶在弯道上时,相邻车道的车辆可能在一定概率或者幅度上入侵自车所在的车道,若此时自车的辅助驾驶功能仍控制车辆保持在车道中间行驶,可能会对驾驶员造成恐慌,甚至引发碰撞危险,酿成行车事故。
2、因此,现有技术中亟待解决如何在自车保持在车道中间行驶时面对入侵车辆进行及时横向避让和预警的问题。
技术实现思路
1、鉴于以上所述的现有技术的缺点,本发明的目的是提供一种用于提高车辆辅助驾驶功能安全性的避让控制方法及系统,解决了自车保持在车道中间行驶时面对入侵车辆进行及时预警和横向避让的问题,提高车辆辅助驾驶功能的安全性。
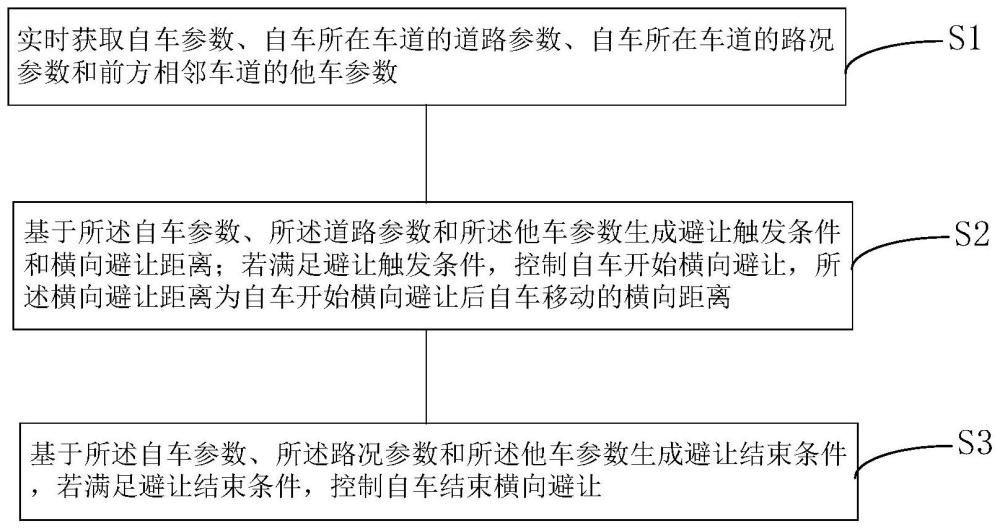
2、本发明第一方面提供一种用于提高车辆辅助驾驶功能安全性的避让控制方法,包括:实时获取自车参数、自车所在车道的道路参数、自车所在车道的路况参数和前方相邻车道的他车参数;
3、基于所述自车参数、所述道路参数和所述他车参数生成避让触发条件和横向避让距离;若满足避让触发条件,控制自车开始横向避让,所述横向避让距离为自车开始横向避让后自车移动的横向距离;
4、基于所述自车参数、所述路况参数和所述他车参数生成避让结束条件,若满足避让结束条件,控制自车结束横向避让。
5、可选的,所述实时获取自车参数、自车所在车道的道路参数、自车所在车道的路况参数和前方相邻车道的他车参数,包括:
6、以自车前轴中心点为坐标系原点建立相对坐标系;
7、实时获取所述自车参数中的自车位置、自车速度、自车上次触发冷却时间和手力矩信号;
8、实时获取所述自车所在车道的道路参数中的中间线、弯道半径和边缘轮廓类型;
9、实时获取所述自车所在车道的路况参数中的障碍物切入信号;
10、实时获取前方相邻车道的他车参数中的他车车长、他车位置和他车速度。
11、可选的,所述基于所述自车参数、所述道路参数和所述他车参数生成避让触发条件和横向避让距离,包括:
12、基于所述自车位置和所述他车位置获取两车之间的横向距离,基于所述自车位置、所述弯道半径和所述边缘轮廓类型获取安全距离;基于所述横向距离和所述安全距离生成初始横向避让距离;
13、设置预设车长阈值,判断所述他车车长和所述预设车长阈值的关系;若所述他车车长超过所述预设车长阈值,得到第一预设车长极限值,基于所述初始横向避让距离和所述第一预设车长极限值生成横向避让距离;若所述他车车长不超过所述预设车长阈值,得到第二预设车长极限值,基于所述初始横向避让距离和所述第二预设车长极限值生成横向避让距离。
14、可选的,所述避让触发条件包括第一避让触发条件、第二避让触发条件、第三避让触发条件和第四避让触发条件;
15、获取所述中间线和所述他车位置之间的距离为车线距离,基于所述车线距离生成第一避让触发条件;若所述车线距离小于预设车线距离阈值,则满足第一避让触发条件;
16、基于所述自车位置和所述他车位置获取自车和他车之间的纵向距离;基于所述自车速度、所述他车速度、所述自车位置和所述他车位置获取自车和他车之间的碰撞时间,基于所述纵向距离和碰撞时间生成第二避让碰撞条件;若所述纵向距离低于预设纵向距离阈值和/或所述碰撞时间低于预设碰撞时间阈值,则满足第二避让触发条件;
17、基于所述弯道半径生成第三避让条件;若所述弯道半径大于预设第一半径阈值,则满足第三避让触发条件;
18、基于所述自车上次触发冷却时间生成第四避让条件,若所述自车上次触发冷却时间超过预设触发冷却时间阈值,则满足第四避让触发条件;
19、当所述第一避让触发条件、所述第二避让触发条件、所述第三避让触发条件和所述第四避让触发条件均被满足时,所述避让触发条件才被满足。
20、可选的,所述基于所述自车参数、所述路况参数和所述他车参数生成避让结束条件,若满足避让结束条件,控制自车结束横向避让,包括:
21、所述避让结束条件包括第一避让结束条件、第二避让结束条件、第三避让结束条件和第四避让结束条件;
22、基于自车位置获取自车车尾的坐标,基于他车位置和他车车长获取他车车头的坐标,基于所述自车车尾的坐标和所述他车车头的坐标生成第一避让结束条件;若所述自车车尾在预设第一持续时间阈值内持续超过他车车头,则满足第一避让结束条件;
23、基于所述手力矩信号生成第二避让结束条件;若所述手力矩信号满足预设手力矩信号阈值,则满足第二避让结束条件;
24、基于所述障碍物切入信号生成第三避让结束条件;若所述障碍物切入信号存在,则满足第三避让结束条件;
25、基于所述弯道半径生成第四避让条件;若所述弯道半径在预设第二持续时间阈值内持续小于预设第二半径阈值,则满足第四避让触发条件;
26、当所述第一避让结束条件、所述第二避让结束条件、所述第三避让结束条件和所述第四避让结束条件中至少一个避让结束条件被满足时,所述避让结束条件即被满足;当所述避让结束条件被满足后,控制自车结束横向避让。
27、可选的,所述若满足避让触发条件,控制自车开始横向避让之后,还包括:
28、获取自车所在车道的后方车辆分布信息;
29、基于所述自车参数、所述道路参数、所述他车参数和所述后方车辆分布信息触发或结束车外提醒信号,所述车外提醒信号包括鸣笛提醒信号。
30、可选的,所述基于所述自车参数、所述道路参数、所述他车参数和所述后方车辆分布信息触发或结束车外提醒信号,还包括:
31、获取当前光照强度值,若所述当前光照强度值低于预设光强值,在所述鸣笛提醒信号的基础上增加灯光提醒信号。
32、本发明第二方面,提供一种用于提高车辆辅助驾驶功能安全性的避让控制系统,包括:参数获取模块,至少用于实时获取自车参数、自车所在车道的道路参数、自车所在车道的路况参数和前方相邻车道的他车参数;
33、避让触发模块,至少用于基于所述自车参数、所述道路参数和所述他车参数生成避让触发条件和横向避让距离;若满足避让触发条件,控制自车开始横向避让,所述横向避让距离为自车开始横向避让后自车移动的横向距离;
34、避让结束模块,至少用于基于所述自车参数、所述路况参数和所述他车参数生成避让结束条件,若满足避让结束条件,控制自车结束横向避让;
35、鸣笛提醒模块,至少用于获取自车所在车道的后方车辆分布信息,基于所述自车参数、所述道路参数、所述他车参数和所述后方车辆分布信息触发或结束车外提醒信号,所述车外提醒信号包括鸣笛提醒信号;
36、灯光提醒模块,至少用于获取当前光照强度值,若所述当前光照强度值低于预设光强值,在所述鸣笛提醒信号的基础上增加灯光提醒信号。
37、本发明第三方面,提供一种用于提高车辆辅助驾驶功能安全性的避让控制系统,包括:
38、辅助驾驶控制器、采集装置和转向系统;
39、所述辅助驾驶控制器通过实时获取自车参数、自车所在车道的道路参数、自车所在车道的路况参数和前方相邻车道的他车参数;
40、当自车前方相邻车道存在他车时,所述辅助驾驶控制器基于所述自车参数、所述道路参数和所述他车参数生成避让触发条件和横向避让距离;若满足避让触发条件,控制自车中的转向系统开始横向避让,所述横向避让距离为自车开始横向避让后自车移动的横向距离;
41、基于所述自车参数、所述路况参数和所述他车参数生成避让结束条件,若满足避让结束条件,控制自车结束横向避让。
42、可选的,所述避让控制系统还包括车身控制系统;
43、所述若满足避让触发条件,控制自车中的转向系统开始横向避让之后,还包括:
44、所述辅助驾驶控制器通过采集装置获取自车所在车道的后方车辆分布信息;
45、基于所述自车参数、所述道路参数、所述他车参数和所述后方车辆分布信息触发所述车身控制系统发出车外提醒信号,所述车外提醒信号包括由喇叭或扬声器发出的鸣笛提醒信号。
46、可选的,所述避让控制系统还包括光强传感器、灯光控制器和大灯;
47、所述光强传感器获取当前光照强度值并发送至驾驶辅助控制器,
48、若所述当前光照强度值低于预设光强值,所述驾驶辅助控制器向所述灯光控制器发出灯光提醒信号,所述灯光提醒信号包括由所述大灯进行投影的示宽光毯。
49、本发明第四方面,提供一种可读存储介质,存储有计算机程序,该计算机程序被处理器执行时实现本发明第一方面所述的用于提高车辆辅助驾驶功能安全性的避让控制方法的步骤。
50、综上所述,与现有技术相比,本发明包括以下至少一种有益技术效果:
51、1.本发明可以使得自车在横向控制过程中与相邻车道车辆保持一定的横向安全距离,提高用户行车安全,既可以实现自车有效避让,也可以在一些不满足避让要求如自车处于半径较小的弯道中的场景时,及时结束避让;
52、2.本发明可以提高驾驶员的安心感和当系统异常时提前接管车辆的能力,可以以鸣笛的方式提醒自车用户和相邻车道入侵的车辆;
53、3.本发明可以在增加横向避让功能的辅助驾驶系统中,通过闪远光灯+鸣笛等方式同时提醒相邻车道入侵的车辆,可大幅度提高超车的通过性和安全性,对于配置了矩阵式大灯的车型,可以直接在道路上投影出代表自车未来几秒内行驶区域示宽光毯,可大大提高驾驶员的安心感和当系统异常时提前接管车辆的能力。
- 还没有人留言评论。精彩留言会获得点赞!