一种车辆悬架控制方法和装置与流程
本技术涉及汽车领域,更具体的说,是涉及一种车辆悬架控制方法和装置。
背景技术:
1、车辆采用的半主动悬架,能够通过对控制阻尼系数进行调节改善汽车行驶平顺性和稳定性。
2、现有技术中,为了提高车辆运行过程中的稳定舒适性,采用天棚控制方法对于车辆悬架的控制阻尼系数进行控制。
3、但是,现有的天棚控制方法主要是对车辆四个轮子处的车身加速度进行监测,根据车辆簧上加速度的大小决定悬架控制阻尼系数的大小,实现对车辆的舒适性进行调节的目的,但天棚控制仅仅考虑了车身部分的运动,未考虑到悬架对车轮部分的影响,悬架对车辆操纵稳定性也有不可忽视的影响,因此,现有的天棚控制方法对于车辆悬架的阻尼控制不够精确。
技术实现思路
1、有鉴于此,本技术提供了一种车辆悬架控制方法和装置,如下:
2、一种车辆悬架控制方法,包括:
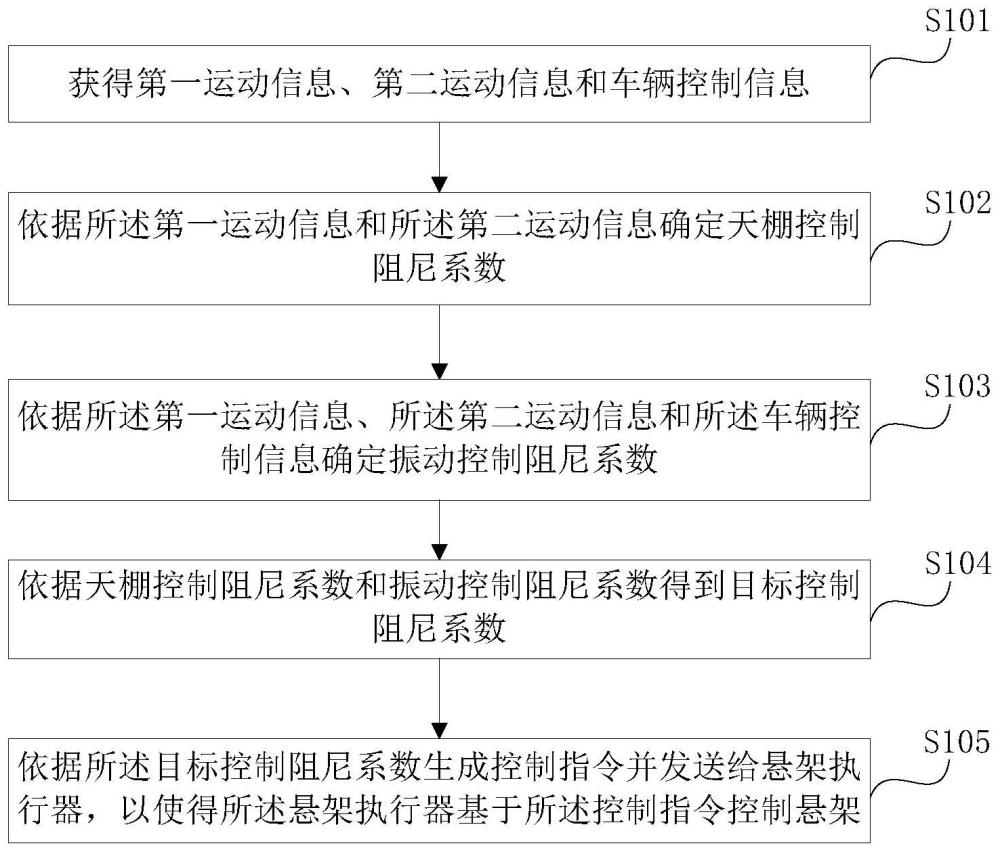
3、获得第一运动信息、第二运动信息和车辆控制信息,所述第一运动信息与悬架无关,所述第二运动信息与悬架相关;
4、依据所述第一运动信息和所述第二运动信息确定天棚控制阻尼系数;
5、依据所述第一运动信息、所述第二运动信息和所述车辆控制信息确定振动控制阻尼系数,所述振动控制阻尼系数与车辆运动中的振动相关;
6、依据天棚控制阻尼系数和振动控制阻尼系数得到目标控制阻尼系数;
7、依据所述目标控制阻尼系数生成控制指令并发送给悬架执行器,以使得所述悬架执行器基于所述控制指令控制悬架。
8、可选的,上述的车辆悬架控制方法,所述依据所述第一运动信息、所述第二运动信息和所述车辆控制信息确定振动控制阻尼系数,包括:
9、依据所述第一运动信息确定所述车辆的运动是否满足预设车轮跳动条件;
10、基于所述车辆的运动满足预设车轮跳动条件,依据第一运动信息、第二运动信息和控制阻尼系数的第一对应关系,确定与所述第一运动信息、所述第二运动信息对应的第一振动控制阻尼系数,所述第一运动信息包括车速,所述第二运动信息包括悬架相对速度。
11、可选的,上述的车辆悬架控制方法,所述依据所述第一运动信息、所述第二运动信息和所述车辆控制信息确定振动控制阻尼系数,包括:
12、依据所述第二运动信息确定所述车辆的运动是否满足预设前轴过障碍条件;
13、基于所述车辆的运动满足预设前轴过障碍条件,依据第一运动信息和车辆控制信息,确定所述车辆的运动是否满足后轴待过障碍条件;
14、基于所述车辆的运动满足后轴待过障碍条件,依据第二运动信息和控制阻尼系数的第二对应关系,确定所述第二运动信息对应的第二振动控制阻尼系数,所述第二运动信息包括前轮悬架相对速度和前轮悬架行程。
15、可选的,上述的车辆悬架控制方法,所述第一运动信息还包括车轮速度,依据所述第一运动信息确定所述车辆的运动是否满足预设车轮跳动条件,包括:
16、获得当前检测时刻的车轮速度以及预设连续历史检测时刻的至少两个历史车轮速度;
17、依据当前检测时刻的车轮速度以及所述至少两个历史车轮速度,得到车轮平均速度;
18、确定当前检测时刻的车轮速度与所述车轮平均速度的第一差值;
19、若所述第一差值大于第一预设差值阈值,确定所述车辆的运动满足预设车轮跳动条件;
20、若所述第一差值不大于所述第一预设差值阈值,确定所述车辆的运动不满足预设车轮跳动条件。
21、可选的,上述的车辆悬架控制方法,依据所述第二运动信息确定所述车辆的运动是否满足预设前轴过障碍条件,包括:
22、获得预设连续历史检测时刻的历史前轮悬架相对速度和历史前轮悬架行程;
23、依据当前检测时刻的前轮悬架相对速度以及预设连续历史检测时刻的历史前轮悬架相对速度,得到前轮悬架平均速度;
24、依据当前检测时刻的前轮悬架行程以及预设连续历史检测时刻的历史前轮悬架行程,得到前轮悬架平均行程;
25、确定所述前轮悬架相对速度与所述前轮悬架平均速度的第二差值;
26、确定所述前轮悬架行程与所述前轮悬架平均行程的第三差值;
27、若所述第二差值大于第二预设差值阈值、且所述第三差值大于第三预设差值阈值,表征所述车轮的运动满足预设前轴过障碍条件;
28、若所述第二差值不大于第二预设差值阈值和/或所述第三差值不大于第三预设差值阈值,表征所述车轮的运动不满足预设前轴过障碍条件。
29、可选的,上述的车辆悬架控制方法,所述第一运动信息包括车速,所述车辆控制信息包括方向盘角度,所述依据第一运动信息和车辆控制信息,确定所述车辆的运动是否满足后轴待过障碍条件,包括:
30、依据预设车速值与方向盘角度的第三对应关系,确定所述车速对应的目标方向盘角度范围;
31、判断所述方向盘角度是否属于所述目标方向盘角度范围;
32、若所述方向盘角度属于目标方向盘角度范围,确定所述车辆的运动满足后轴待过障碍条件;
33、若所述方向盘角度不属于目标方向盘角度范围,确定所述车辆的运动不满足后轴待过障碍条件。
34、可选的,上述的车辆悬架控制方法,所述第一运动信息包括车速,所述方法还包括:
35、获得第二振动控制阻尼系数作用时间;
36、依据车速、预设车辆轴距以及所述第二振动控制阻尼系数作用时间,确定所述第二振动控制阻尼系数对应的控制指令发送给悬架执行器的目标时刻,以使得在达到目标时刻时,将所述第二振动控制阻尼系数与天棚控制阻尼系数对应的控制指令发送给后轴悬架执行器。
37、可选的,上述的车辆悬架控制方法,所述依据天棚控制阻尼系数和振动控制阻尼系数得到目标控制阻尼系数,包括:
38、依据设定权重值以及所述天棚控制阻尼系数和振动控制阻尼系数计算得到初始控制阻尼系数;
39、若所述初始控制阻尼系数属于预设阻尼系数范围,确定所述初始控制阻尼系数为目标控制阻尼系数;
40、若所述初始控制阻尼系数大于预设阻尼系数范围上限值,确定所述预设阻尼系数范围上限值为目标控制阻尼系数;
41、若所述初始控制阻尼系数小于预设阻尼系数范围下限值,确定所述预设阻尼系数范围下限值为目标控制阻尼系数。
42、可选的,上述的车辆悬架控制方法,依据所述目标控制阻尼系数生成控制指令并发送给悬架执行器,包括:
43、获得悬架执行器的当前控制阻尼系数;
44、确定所述目标控制阻尼系数与所述当前控制阻尼系数之间的阻尼系数差值;
45、基于所述目标控制阻尼系数属于预设阻尼变化范围,基于所述阻尼系数差值生成第一控制指令,将第一控制指令发送给悬架执行器,所述阻尼变化范围的上限值是预设增加限值,所述阻尼变化范围的下限值是预设减小限值;
46、基于所述阻尼系数差值大于预设增加限值,按照输出周期,依据当前控制阻尼系数与所述预设增加限值生成第二控制指令,将所述第二控制指令发送给悬架执行器,并返回执行所述获得悬架执行器的当前控制阻尼系数步骤至所述阻尼系数差值属于预设阻尼变化范围;
47、基于所述阻尼系数差值小于预设减小限值,按照输出周期,依据当前控制阻尼系数与所述预设减小限值生成第三控制指令,将所述第三控制指令发送给悬架执行器,并返回执行所述获得悬架执行器的当前控制阻尼系数步骤,至确定所述阻尼系数差值属于所述预设阻尼变化范围。
48、一种车辆悬架控制装置,包括:
49、获得模块,用于获得第一运动信息、第二运动信息和车辆控制信息,所述第一运动信息与悬架无关,所述第二运动信息与悬架相关;
50、天棚控制确定模块,用于依据所述第一运动信息和所述第二运动信息确定天棚控制阻尼系数;
51、振动控制确定模块,用于依据所述第一运动信息、所述第二运动信息和所述车辆控制信息确定振动控制阻尼系数,所述振动控制阻尼系数与车辆运动中的振动相关;
52、得到模块,用于依据天棚控制阻尼系数和振动控制阻尼系数得到目标控制阻尼系数;
53、生成模块,用于依据所述目标控制阻尼系数生成控制指令并发送给悬架执行器,以使得所述悬架执行器基于所述控制指令控制悬架。
54、综上,本技术提供的一种车辆悬架控制方法和装置,包括:获得第一运动信息、第二运动信息和车辆控制信息,所述第一运动信息与悬架无关,所述第二运动信息与悬架相关;依据所述第一运动信息和所述第二运动信息确定天棚控制阻尼系数;依据所述第一运动信息、所述第二运动信息和所述车辆控制信息确定振动控制阻尼系数;依据天棚控制阻尼系数和振动控制阻尼系数得到目标控制阻尼系数;依据所述目标控制阻尼系数生成控制指令并发送给悬架执行器,以使得所述悬架执行器基于所述控制指令控制悬架。本技术中,基于天棚控制阻尼系数和振动控制阻尼系数得到的目标控制阻尼系数的生成控制指令,该控制指令中的目标控制阻尼系数是结合了天棚控制阻尼系数和振动控制阻尼系数的,将车辆加速情况和振动情况均考虑,基于该控制指令控制悬架的动作,提高了车辆的稳定性。
- 还没有人留言评论。精彩留言会获得点赞!