一种新能源半挂车驱动控制方法及系统与流程
本发明涉及半挂车转速异常检测及驱动控制,具体涉及一种新能源半挂车驱动控制方法及系统。
背景技术:
1、在半挂车驱动系统中,驱动控制包括电机控制等,用以精确控制电机的扭矩和转速,以适应不同的驾驶情况;通常情况下,可以依据半挂车轮胎转速分配电机驱动速度,但由于转弯过程中牵引车车轮转速与半挂车车轮转速存在速度差的问题,车轮转速会发生异常,影响整车转弯的安全性,所以需要检测车轮转速数据的异常。
2、现有技术中,采用孤立森林算法采集每一时刻车轮转速数据的异常情况,但由于当半挂车车轮转速在不同时刻都属于异常值时,正常值可能会被认为异常值,未能获得牵引车车轮转速与半挂车车轮转速之间准确的联系度,无法识别异常数据,进而导致异常检测结果不能够有效反应驱动电机转速存在偏差的问题。
技术实现思路
1、为了解决未能考虑不同维度的转速数据之间准确的联系度,导致异常检测不准确的技术问题,本发明的目的在于提供一种新能源半挂车驱动控制方法及系统,所采用的技术方案具体如下:
2、本发明提出了一种新能源半挂车驱动控制方法,所述方法包括:
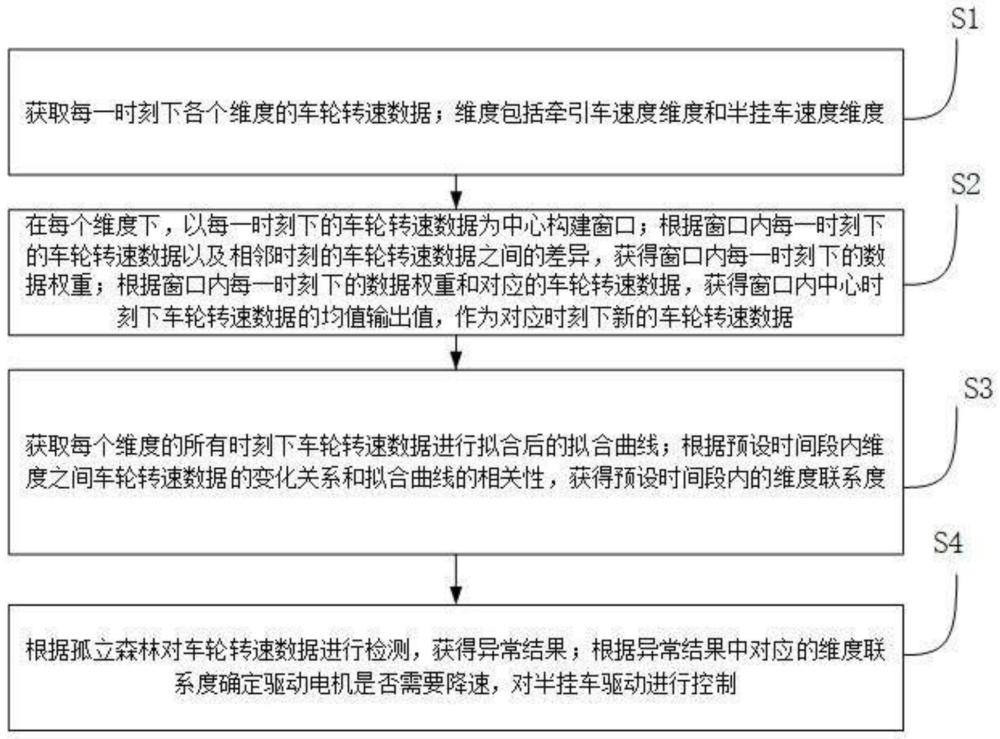
3、获取每一时刻下各个维度的车轮转速数据;所述维度包括牵引车速度维度和半挂车速度维度;
4、在每个维度下,以每一时刻下的车轮转速数据为中心构建窗口;根据所述窗口内每一时刻下的车轮转速数据以及相邻时刻的车轮转速数据之间的差异,获得所述窗口内每一时刻下的数据权重;根据所述窗口内每一时刻下的所述数据权重和对应的车轮转速数据,获得所述窗口内中心时刻下车轮转速数据的均值输出值,作为对应时刻下新的车轮转速数据;
5、获取每个维度的所有时刻下车轮转速数据进行拟合后的拟合曲线;根据预设时间段内维度之间车轮转速数据的变化关系和拟合曲线的相关性,获得预设时间段内的维度联系度;
6、根据孤立森林对车轮转速数据进行检测,获得异常结果;根据所述异常结果中对应的所述维度联系度确定驱动电机是否需要降速,对半挂车驱动进行控制。
7、进一步地,所述数据权重的获取方法包括:
8、在每个维度下,计算所述窗口内相邻时刻下的车轮转速数据之间的差值,将所有差值累加,作为第一累加值;计算第一累加值与预设常数之和,并求倒数,获得第一权重系数;
9、计算所述窗口内每一时刻下的车轮转速数据与第一权重系数的乘积,并归一化,获得所述窗口内每一时刻下的数据权重。
10、进一步地,所述均值输出值的获取方法包括:
11、对于每个维度下,计算所述窗口内每一时刻下的所述数据权重与对应的车轮转速数据的乘积,获得每一时刻下的加权转速数据;
12、对所述窗口内所有时刻下的加权转速数据进行累加,并求均值,获得所述窗口内中心时刻下车轮转速数据的均值输出值。
13、进一步地,所述拟合曲线的获取方法包括:
14、采用最小二乘法获得每个维度下所有时刻的车轮转速数据进行拟合后的拟合曲线。
15、进一步地,所述拟合曲线的相关性的获取方法包括:
16、在预设时间段内,将每个维度拟合曲线的连续函数进行积分,获得每个维度拟合曲线的整体分布;
17、计算维度之间拟合曲线的整体分布差异,获得维度之间拟合曲线的相关性。
18、进一步地,所述维度联系度的获取方法包括:
19、根据维度联系度的获取公式获得维度联系度,维度联系度的获取公式为:
20、其中,con表示预设时间段内的维度联系度;xout,i表示牵引车速度维度的第i个时刻的数据;yout,i表示半挂车速度维度的第i个时刻的数据;axy表示牵引车速度维度和半挂车速度维度之间拟合曲线的相关性;θ表示整车转弯时的夹角;cosθ表示整车转弯时的夹角的余弦值;n表示预设时间段内时刻的总数量;α表示预设权重系数;norm()表示归一化函数。
21、进一步地,所述确定驱动电机是否需要降速的获取方法包括:
22、预设维度联系度阈值;在异常结果中对应的所述维度联系度大于预设维度联系度阈值时,维持所述驱动电机运行;
23、在异常结果中对应的所述维度联系度小于等于预设维度联系度阈值时,对所述驱动电机进行降速处理。
24、进一步地,所述预设权重系数为0.6。
25、进一步地,所述预设维度联系度阈值为0.9。
26、本发明还提出了一种新能源半挂车驱动控制系统,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时,实现任意一项所述一种新能源半挂车驱动控制方法的步骤。
27、本发明具有如下有益效果:
28、本发明为了避免噪声的干扰,更细致地研究数据的变化和趋势,在每个维度下,以每一时刻下的车轮转速数据为中心构建窗口;根据窗口内每一时刻下的车轮转速数据以及相邻时刻的车轮转速数据之间的差异,获得窗口内每一时刻下车轮转速数据的数据权重,为数据的变化速度和趋势为数据点赋予重要性;根据窗口内每一时刻下的数据权重和对应的车轮转速数据,获得窗口内中心时刻下车轮转速数据的均值输出值,作为对应时刻下新的车轮转速数据,得到一个更稳定、更准确的转速数据表示;获取每个维度的所有时刻下车轮转速数据进行拟合后曲线,更好地描述每个维度下转速数据的整体趋势;根据预设时间段内维度之间车轮转速数据的变化关系和拟合曲线的相关性,获得预设时间段内的维度联系度,判断维度之间数据的关系;根据孤立森林对车轮转速数据进行检测,获得异常结果;确定驱动电机是否需要降速,对半挂车驱动进行控制。本发明通过考虑不同维度数据之间准确的联系度,提高异常检测的准确性,优化半挂车辅助驱动功能。
技术特征:
1.一种新能源半挂车驱动控制方法,其特征在于,所述方法包括:
2.根据权利要求1所述的一种新能源半挂车驱动控制方法,其特征在于,所述数据权重的获取方法包括:
3.根据权利要求1所述的一种新能源半挂车驱动控制方法,其特征在于,所述均值输出值的获取方法包括:
4.根据权利要求1所述的一种新能源半挂车驱动控制方法,其特征在于,所述拟合曲线的获取方法包括:
5.根据权利要求1所述的一种新能源半挂车驱动控制方法,其特征在于,所述拟合曲线的相关性的获取方法包括:
6.根据权利要求1所述的一种新能源半挂车驱动控制方法,其特征在于,所述维度联系度的获取方法包括:
7.根据权利要求1所述的一种新能源半挂车驱动控制方法,其特征在于,所述确定驱动电机是否需要降速的获取方法包括:
8.根据权利要求6所述的一种新能源半挂车驱动控制方法,其特征在于,所述预设权重系数为0.6。
9.根据权利要求7所述的一种新能源半挂车驱动控制方法,其特征在于,所述预设维度联系度阈值为0.9。
10.一种新能源半挂车驱动控制系统,所述系统包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如权利要求1~9任意一项所述一种新能源半挂车驱动控制方法的步骤。
技术总结
本发明涉及半挂车转速异常检测及驱动控制技术领域,具体涉及一种新能源半挂车驱动控制方法及系统。该发明通过构建每个维度下的窗口;根据窗口内每一时刻下的车轮转速数据以及相邻时刻的车轮转速数据之间的差异,获得窗口内每一时刻下车轮转速数据的数据权重;进一步获得窗口内中心时刻下车轮转速数据的均值输出值,作为对应时刻下新的车轮转速数据;根据预设时间段内在维度之间车轮转速数据的变化关系和拟合曲线的相关性,获得预设时间段内的维度联系度;结合孤立森林结果,确定驱动电机是否需要降速,对半挂车驱动进行控制。本发明通过考虑不同维度数据之间准确的联系度,提高异常检测的准确性,优化半挂车辅助驱动功能。
技术研发人员:谢铁华,谢奇智,支倩,谭欣荣,谢晓妍,汪力
受保护的技术使用者:湖南铁华精斧汽车集团股份有限公司
技术研发日:
技术公布日:2024/3/21
- 还没有人留言评论。精彩留言会获得点赞!