换电泊车控制方法、介质、装置及车辆与流程
本发明涉及换电,具体涉及一种换电泊车控制方法、介质、装置及车辆。
背景技术:
1、随着新能源汽车的销量快速增长,用户对于补能服务的需求也日趋强烈。以纯电动汽车为例,相较于充电的补能方式而言,换电的方式通常可以在很短的时间内就可以完成补能,很大程度上提高了补能效率,因此是国家重点发展的补能方向之一。换电过程在充换电站中进行,首先待换电车辆泊车至充换电站的换电平台上,然后换电机器人将待换电车辆上的亏电电池卸下,最后将满电电池安装在待换电车辆上。
2、目前,换电泊车主要有两种形式:换电自动泊车和换电手动泊车,其中为提高换电体验,通常以换电自动泊车为主。但在实际应用中,换电自动泊车激活过程,车辆可能存在自动泊车系统故障,导致换电自动泊车无法正常工作,此时需要将泊车流程从换电自动泊车切换至换电手动泊车,即驾驶员手动泊车进入换电站。但是,由于驾驶员的驾驶水平参差不齐,手动泊车过程中容易存在无法控制好车速、冲撞充换电站基础设施等风险。
3、相应地,本领域需要一种新的技术方案来解决上述问题。
技术实现思路
1、为了解决现有技术中的上述至少一个问题,即为了解决换电手动泊车存在的无法控制好车速、冲撞充换电站基础设施的问题,本申请提供了一种换电泊车控制方法,所述控制方法包括:
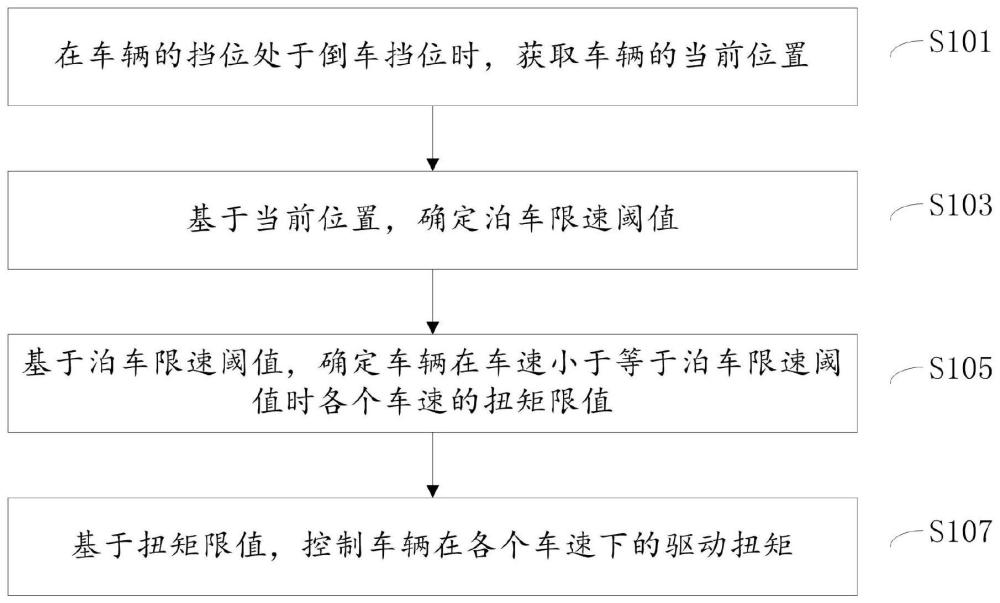
2、在车辆的挡位处于倒车挡位时,获取车辆的当前位置;
3、基于所述当前位置,确定泊车限速阈值;
4、基于所述泊车限速阈值,确定所述车辆在车速小于等于所述泊车限速阈值时各个车速的扭矩限值;
5、基于所述扭矩限值,控制所述车辆在各个车速下的驱动扭矩。
6、本申请的上述控制方法,通过获取车辆在泊车过程中的当前位置,并基于当前位置所对应的泊车限速阈值确定车辆在各个车速的扭矩限值,然后基于扭矩限值控制车辆在各个车速下的驱动扭矩,可以在泊车过程中基于车辆的位置控制车辆的泊车速度,防止驾驶员非预期的操作导致车辆冲撞换电站基础设施发生事故,提升换电手动泊车过程的安全性。并且基于车辆位置的不同,泊车限速阈值也不同,相应地扭矩限值不同,还能够兼顾泊车过程中的安全与效率。
7、在上述换电泊车控制方法的优选技术方案中,“基于所述当前位置,确定泊车限速阈值”的步骤进一步包括:
8、如果所述车辆的当前位置处于充换电站外,则确定所述泊车限速阈值为第一阈值;
9、如果所述车辆的当前位置处于充换电站内且所述车辆的用于定位的车轮处于定位槽附近,则确定所述泊车限速阈值为第二阈值;
10、如果所述车辆的当前位置处于充换电站内且所述车辆的用于定位的车轮嵌设于定位槽中,则确定所述泊车限速阈值为第三阈值;
11、其中,所述第一阈值、所述第二阈值和所述第三阈值的大小依次递减。
12、通过基于不同位置确定不同的泊车限速阈值,可以实现更加高效地泊车。
13、在上述换电泊车控制方法的优选技术方案中,“基于所述泊车限速阈值,确定所述车辆在车速小于等于所述泊车限速阈值时的各个车速的扭矩限值”的步骤进一步包括:
14、基于所述泊车限速阈值以下的各个车速点与扭矩限值之间的对应关系,确定扭矩限值。
15、在上述换电泊车控制方法的优选技术方案中,“基于所述扭矩限值,控制所述车辆在各个车速下的驱动扭矩”的步骤进一步包括:
16、如果所述车辆的当前车速小于所述泊车限速阈值,则基于所述当前车速和所述车辆的加速踏板的开度,确定扭矩请求值;
17、基于所述当前车速下的扭矩限值和所述扭矩请求值中的较小值,控制所述车辆在所述当前车速的驱动扭矩。
18、通过基于当前车速的扭矩限值和扭矩请求值中的较小值控制车辆的驱动扭矩,可以在有效限制泊车速度的同时,保证车辆泊车过程的顺畅度。
19、在上述换电泊车控制方法的优选技术方案中,“基于所述当前车速和所述车辆的加速踏板的开度值,确定扭矩请求值”的步骤进一步包括:
20、基于所述当前车速、所述车辆的加速踏板的开度与所述扭矩请求值的对应关系,确定所述扭矩请求值。
21、在上述换电泊车控制方法的优选技术方案中,“基于所述扭矩限值,控制所述车辆在各个车速下的驱动扭矩”的步骤进一步包括:
22、如果所述车辆的当前车速等于所述泊车限速阈值,则基于所述泊车限速阈值所对应的扭矩限值控制所述车辆的驱动扭矩。
23、通过当前车速等于泊车限速阈值时基于泊车限速阈值对应的扭矩限值控制车辆的驱动扭矩,可以有效避免车辆泊车速度过快而导致冲撞充换电站基础设施,提升泊车过程安全性。
24、在上述换电泊车控制方法的优选技术方案中,所述控制方法还包括:
25、获取所述车辆的制动踏板的开度;
26、基于所述制动踏板的开度,控制所述车辆的驱动扭矩,直至所述制动踏板的开度大于预设开度时,控制所述车辆的驱动扭矩为零。
27、上述控制方法,可以保证车辆的平稳刹停。
28、本申请第二方面,还提供了一种计算机可读存储介质,其存储有多条程序代码,所述程序代码适于由处理器加载并运行以执行第一方面中任一项所述的换电泊车控制方法。
29、本申请第三方面,还提供了一种控制装置,所述控制装置包括:
30、处理器;
31、存储器,所述存储器适于存储多条程序代码,所述程序代码适于由所述处理器加载并运行以执行第一方面中任一项所述的换电泊车控制方法。
32、本申请第四方面,还提供了一种车辆,所述车辆包括第三方面所述的控制装置。
33、本申请的车辆,通过设置上述控制装置,可以在泊车过程中基于车辆的位置控制车辆的泊车速度,防止驾驶员非预期的操作导致车辆冲撞换电站基础设施发生事故,提升换电手动泊车过程的安全性。
技术特征:
1.一种换电泊车控制方法,其特征在于,所述控制方法包括:
2.根据权利要求1所述的换电泊车控制方法,其特征在于,“基于所述当前位置,确定泊车限速阈值”的步骤进一步包括:
3.根据权利要求1所述的换电泊车控制方法,其特征在于,“基于所述泊车限速阈值,确定所述车辆在车速小于等于所述泊车限速阈值时的各个车速的扭矩限值”的步骤进一步包括:
4.根据权利要求1所述的换电泊车控制方法,其特征在于,“基于所述扭矩限值,控制所述车辆在各个车速下的驱动扭矩”的步骤进一步包括:
5.根据权利要求4所述的换电泊车控制方法,其特征在于,“基于所述当前车速和所述车辆的加速踏板的开度值,确定扭矩请求值”的步骤进一步包括:
6.根据权利要求1所述的换电泊车控制方法,其特征在于,“基于所述扭矩限值,控制所述车辆在各个车速下的驱动扭矩”的步骤进一步包括:
7.根据权利要求1所述的换电泊车控制方法,其特征在于,所述控制方法还包括:
8.一种计算机可读存储介质,其存储有多条程序代码,其特征在于,所述程序代码适于由处理器加载并运行以执行权利要求1至7中任一项所述的换电泊车控制方法。
9.一种控制装置,其特征在于,所述控制装置包括:
10.一种车辆,其特征在于,所述车辆包括权利要求9所述的控制装置。
技术总结
本发明涉及换电技术领域,具体涉及一种换电泊车控制方法、介质、装置及车辆。本申请旨在解决换电手动泊车存在的无法控制好车速、冲撞充换电站基础设施的问题。为此目的,本申请的换电泊车控制方法包括:在车辆的挡位处于倒车挡位时,获取车辆的当前位置和当前车速;基于当前位置,确定泊车限速阈值;比较当前车速与泊车限速阈值的大小;基于比较结果,控制车辆的驱动扭矩。本申请的上述控制方法,通过获取车辆在泊车过程中的当前位置,并基于当前位置所对应的泊车限速阈值与当前车速的大小控制车辆的驱动扭矩,可以在泊车过程中控制车辆的泊车速度,避免车速过快而损坏对充换电站的基础设施,提升换电手动泊车过程的安全性。
技术研发人员:舒南翔,马平川,吴迪,马健,李欣,尹碧如,张栋
受保护的技术使用者:蔚来汽车科技(安徽)有限公司
技术研发日:
技术公布日:2024/3/12
- 还没有人留言评论。精彩留言会获得点赞!