基于道路信息和侧向加速度预测的时变刚度汽车稳定性控制方法
:本发明涉及汽车稳定性控制领域以及车辆的路径跟踪性能,更具体地说,涉及基于道路信息和侧向加速度预测的时变刚度汽车稳定性控制方法。
背景技术
0、
背景技术:
1、随着交通拥堵问题的日益严重和道路安全问题的日益突出,汽车主动安全技术得到快速发展,自动驾驶车辆已经成为汽车行业发展的趋势。当谈及车辆动态性能时,侧向稳定性和路径跟踪能力成为两个至关重要的方面。但是,由于实际的道路环境十分复杂,车辆本身也存在着强非线性,使得自动驾驶车辆的跟踪控制面临巨大的挑战。基于此,对汽车稳定性控制以及路径跟踪能力的控制方法被广泛研究。
2、汽车侧向加速度是汽车侧向稳定性中常用的衡量指标。有许多研究表明加速度是影响驾驶员与乘客安全性的与舒适性的重要指标。一般情况下,普通汽车在转弯时的操作顺序应为:入弯前减速、弯道内保持、转弯后加速。在这三个过程中,汽车将依次产生向后加速度、向心加速度和向前加速度。在短时间内,三个方向的加速度会使汽车的驾驶员和乘坐者的坐姿偏离原来的坐姿,并且由于惯性的影响,可能会发生碰撞等安全事件,影响乘坐的安全性和舒适性。为了提高舒适性,出现了gvc技术,根据转向引起的横向加速度的变化率自动控制纵向加速度,从而使加速度的均方根值最小化,从而提高舒适性。为提高过弯稳定性及舒适性,进行汽车侧向加速度的预测,在汽车接近或达到动力学极限时对汽车提前进行主动干预,避免汽车侧向加速度超出安全范围是非常有必要的。
3、目前,在路径跟踪控制算法领域,主要的控制算法包括比例积分微分控制(pid)、纯跟踪控制、线性二次调节器控制(lqr)、滑模控制(smc)和模型预测控制(mpc)等。由于mpc在处理多目标以及系统约束方面具有明显的优势,因此在车辆控制领域得到了广的应用。轮胎力是影响车辆稳定性的重要因素,高速极限工况下自动驾驶汽车路径跟踪控制器设计时需要建立高精度的非线性轮胎模型。论文[falcone p.,borrelli f.,asgari j.,etal.predictive active steering control for autonomous vehicle systems[j].ieeetransactions on control systems technology,2007,15(3):566-580.]将模型预测控制算法应用于基于非线性车辆模型和线性时变车辆模型的路径跟随控制器设计,实现了低附着系数道路上双车道变道和变道的路径跟随控制。基于线性模型的mpc算法计算量较小,但当车辆偏离线性化工作区时,会导致控制效果恶化,甚至导致车辆不稳定。[brown m,funkej,erlien s,et al.safe driving envelopes for path tracking in autonomousvehicles[j].control engineering practice,2017,61(04):307-316.]提出了一种线性时变mpc方法,该方法利用最后时刻求解的轮胎侧偏角序列在时域中将当前预测的轮胎力线性化,同时兼顾了系统的非线性特性和计算负担。但是,论文中对轮胎力线性化处理的方法过于简单,并未考虑参考的信息例如道路以及车辆与道路之间的航向误差、横向误差,无法表征轮胎侧向力的实际变化趋势,因此模型精度存在一定误差。
技术实现思路
0、
技术实现要素:
1、为解决上述问题,提高车辆的侧向稳定性并且提高控制器跟踪路径的精度,本发明提供了基于道路信息和侧向加速度预测的时变刚度汽车稳定性控制方法,解决入弯减速出弯加速的权衡问题。其次,采用考虑道路信息的线性时变模型预测控制方法(ltv-mpc)设计基于道路曲率信息,车辆与道路之间的侧向偏差、航向偏差对汽车侧偏刚度的影响的一体式集成控制器。建立以汽车状态量增量为状态变量的目标函数,设计对系统的控制输入和控制增量的约束,并将目标函数转换为具有约束的二次规划问题,以进行优化控制,提高车辆的路径跟踪能力以及侧向稳定性。
2、本发明解决技术问题所采取的技术方案如下:
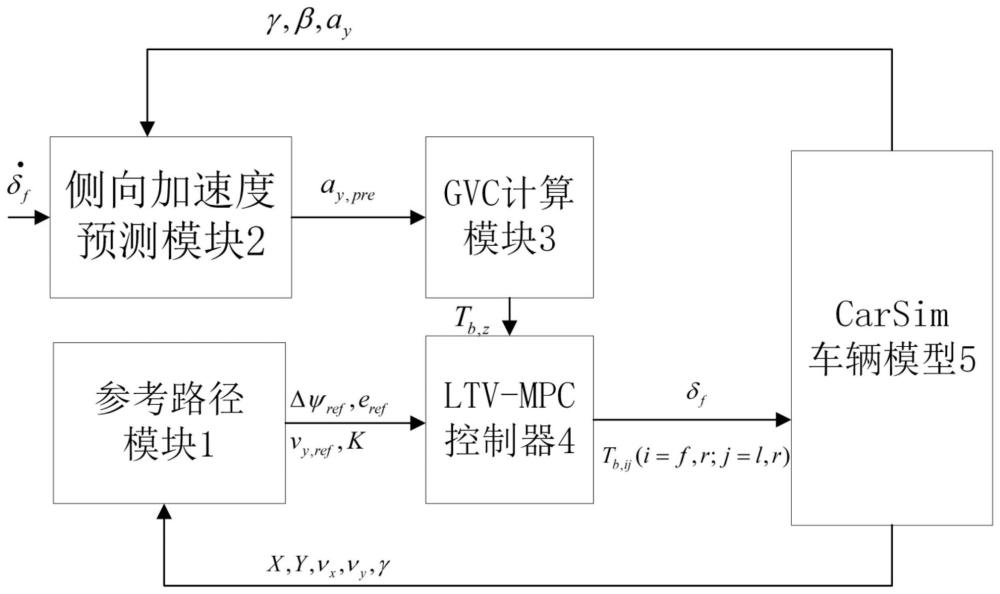
3、基于道路信息和侧向加速度预测的时变刚度汽车稳定性控制方法,其特征在于,该方法包括参考路径模块、ltv-mpc控制器、侧向加速度预测模块、gvc计算模块以及carsim车辆模型;参考路径模块用于确定期望的侧向偏差、航向偏差、侧向速度以及道路曲率;侧向加速度预测模块预测出当前时刻之后ts*p(ts是采样时间,p是预测时域)秒内的侧向加速度;gvc计算模块根据预测出的侧向加速度,求解出总的制动力矩输入给ltv-mpc控制器进行等式约束;carsim车辆模型用于输出汽车的实际状态量,包括汽车的横纵坐标、纵侧向车速、横摆角速度;ltv-mpc控制器根据期望的侧向速度、航向偏差、侧向偏差以及道路的曲率对车辆的侧偏刚度进行时变,优化求解出汽车的前轮转角以及制动力矩输入给carsim车辆模型,实现汽车的稳定性控制,提高路径跟踪能力。
4、该方法包括一下步骤:
5、步骤1、设计参考路径模型模块,用于确定期望的侧向速度、侧向偏差、航向偏差以及道路的曲率,其过程包括如下子步骤:
6、步骤1.1、采用前轮驱动并配备主动前轮转向和差速制动的四轮车辆模型作为参考模型,其运动微分方程为如下(假设前轮转角很小):
7、
8、
9、其中,γ是横摆角速度;vy是侧向速度;iz是绕汽车质心的铅垂轴的横摆转动惯量;vx是汽车纵向速度;lf和lr分别是汽车质心至前、后轴的距离;fyij(ij=fl,fr,rl,rr)是轮胎的左前、右前、左后、右后侧向力,m是车辆的整备质量,tbij(ij=fl,fr,rl,rr)是车辆的左前、右前、左后、右后制动力矩,w是车辆的轮距,r是车轮的半径。
10、在建立车辆动力学模型时,可以用相对道路的航向偏差和侧向偏差e作为状态变量的动力学模型,车辆的航向和侧向偏差由以下方程进行描述并且进行小角度假设:
11、
12、
13、其中k是参考路径下的曲率。
14、步骤1.2、根据步骤1.1中的微分方程(2),设计期望的汽车的侧向速度。稳定性控制的目标是让侧向速度尽可能小,故将其期望值设为零;所以期望的侧向速度表达式如下表示:
15、
16、步骤1.3、根据步骤1.1中的微分方程(3)、(4),设计期望的侧向偏差和航向偏差。路径跟踪的目标是侧向偏差,航向偏差越小越好,故将其参考值设为零;为了保证路径跟踪的精度,所以期望的侧向偏差以及航向偏差的表达式如下所示:
17、eref=0 (6)
18、δψref=0 (7)
19、步骤2、设计侧向加速度预测模块,过程如下:
20、步骤2.1、预测模型采用线性模型,其动力学微分方程表达式如下:
21、
22、
23、
24、
25、其中,ay是汽车侧向加速度;
26、汽车轮胎侧向力模型采用线性轮胎模型,侧向力表达式如下:
27、fy,fl=fy,fr=cfjαfj,fy,rl=fy,rr=crjαrj (12)
28、其中,fyij(i=f,r;j=l,r)分别是左前、右前、左后、右后轮的侧向力;cfj与crj分别为前后轮胎的侧偏刚度;αfj与αrj分别为前后轮的侧偏角,(j=l,r);
29、前后轮侧偏角可以近似的表示为:
30、
31、其中δfj(j=l,r)为左右前轮转角;
32、将式(12)(13)带入式(8)(9)中,整理为:
33、
34、
35、将式(14b)左右求导可得:
36、
37、由汽车动力学可得:
38、
39、将式(14a)与式(16)带入式(15)可得:
40、
41、步骤2.2、建立汽车侧向加速度预测模型
42、将式(14a)(16)(17)(10)(11)表达为状态空间方程形式:
43、
44、其中,状态变量ξ=[γ,β,ay,δψ,e]t;控制输入u=[δ,tb,fl,tb,fr,tb,rl,tb,rr]t;干扰矩阵干扰输入输出ζ(k)=ay;系数矩阵aξ与bu分别为:其中步骤2.3汽车侧向加速度预测模型输出,其过程包括:
45、将式(18)所示状态空间方程进行离散化;假设离散系统的采样时间为ts,预测时域为p,则增量式离散化状态空间方程写为:
46、
47、在当前时刻k,假设与测试与内控制量不变,以状态ζ(k)为预测起点,对预测时域内汽车状态进行预测,则预测时域内p步的预测输出可以表示为:
48、
49、
50、
51、步骤3、设计gvc计算模块,过程如下:
52、通过得到的侧向加速度,通过(10)得到纵向加速度,根据换算关系得到总的制动力矩,将制动力输入到mpc模块对四个车轮的制动力矩进行等式约束。gvc的经验公式如下:
53、
54、其中是axc纵向加速度命令。这是一个非常简单的控制规则,即纵向加速度命令基本上是通过将增益cxy乘以给出第一个延迟的横向抖动来确定的。
55、步骤4、设计ltv-mpc控制器,其过程包括如下子步骤:
56、步骤4.1、推导线性时变预测模型:
57、ltv-mpc在当前时刻对轮胎力进行线性化,根据参考路径模块得到的期望的侧向速度、航向偏差、侧向偏差以及道路的曲率对侧偏刚度进行时变,具体方法如下:
58、将线性轮胎模型fy,i=ciαi带入到式(8)(9),得到车辆动力学方程为
59、
60、
61、
62、
63、联立式(21)和式(22),然后进行整理,得到
64、
65、
66、将(25a)(25b)中的横摆角、横摆角速度、侧向加速度用(23)(24)中表示出来:
67、
68、
69、
70、将参考路径模块得到的vy,δψ,e及其对时间的一阶和二阶导代入(26)~(28),得到
71、
72、
73、
74、其中kμ,γ,是补偿附着系数影响的调节因子。
75、将(25a)(25b)的侧偏刚度利用参考道路信息进行表示,可得:
76、
77、
78、将式(21)~(24)整理成标准的状态空间方程为:
79、
80、其中,状态变量ξ=[γ,vy,δψ,e]t,控制输入u=[δ,tx,fl,tx,fr,tx,rl,tx,rr]t,控制输出ζ=[vy,δψ,e]t,干扰输入矩阵aξ、bu分别定义为:
81、
82、
83、
84、将步骤4.1中的式(34)通过ts=0.01进行离散化,可以得到增量型的离散系统模型如下:
85、
86、步骤4.2、计算预测输出,根据模型预测控制理论,取预测时域为p,控制时域为m,可以得到在当前k时刻的预测输出为:
87、y(k+1|k)=sξ·δξ(k)+su·δu(k)+sdδd(k)+i·y(k) (36)
88、
89、
90、
91、步骤4.3、预测输出序列,控制输入序列以及参考输出序列在k时刻定义如下:
92、
93、
94、
95、其中,r=[vy,ref,δψref,eref]t。
96、步骤4.4、采用mpc实现路径跟踪控制时,应满足一下指标:1)路径跟踪精度;2)跟踪参考的侧向速度,侧向误差、航向误差尽可能地小。此外,设计的控制器应满足执行器的物理约束。
97、步骤4.4.1、设计控制器的成本函数,可以设计为如下所示:
98、j=||γy(y(k+1)-r(k+1))||2+||γuδu(k)||2 (40)
99、其中,γy时预测输出的权重矩阵,γy=diag([τy(k+1),…,τy(k+p)]),
100、γu是控制输入的权重矩阵,
101、γu=diag([τu(k),…,τu(k+m-1)]),
102、τδψ,τe,τδ,时与其下标对应变量的权重。
103、步骤4.4.2、设置控制器的物理约束,满足控制器要求:
104、控制输入以及控制输入的变化率应受到的约束为:
105、
106、最后,mpc的优化问题可以表示如下:
107、
108、将优化问题转化成二次规划问题进行求解:
109、
110、其中h,g,定义如下:
111、
112、
113、ep(k+1)=r(k+1)-sξδx(k)-iζ(k)
114、
115、tu=diag([inu,…inu]m)
116、
117、
118、其中u(k-1)是在时间k-1时控制输入的测量值的矩阵。
119、本发明的有益效果是:
120、本发明提出了基于道路信息和侧向加速度预测的时变刚度汽车稳定性控制方法,设计了侧向加速度预测模块,将预测出的ay联合gvc技术对车辆的制动力矩进行等式约束,权衡了车辆入弯减速和出弯加速的关系,提升车辆的稳定性。设计了一体式集成路径跟踪与稳定性控制器,提高了车辆在行驶过程中的侧向稳定性,提高了路径跟踪的精度。
- 还没有人留言评论。精彩留言会获得点赞!