一种基于工业应用机器人的动力轮的避震机构的制作方法
本技术涉及避震结构,特别是一种基于工业应用机器人的动力轮的避震机构。
背景技术:
1、在当前社会发展水平下,企业的产制造的人工成本越来越高,越来越多的机器人代替人工,针对市面上常见的工业agv的主动轮避震结构采用固定式,过坑、过坎的幅度较小,使用环境比较单一,不能适应复杂的地面环境,为此我们提供一种基于工业应用机器人的动力轮的避震机构来解决上述问题。
技术实现思路
1、本实用新型的目的在于克服现有技术的缺点,提供一种基于工业应用机器人的动力轮的避震机构。
2、本实用新型的目的通过以下技术方案来实现:
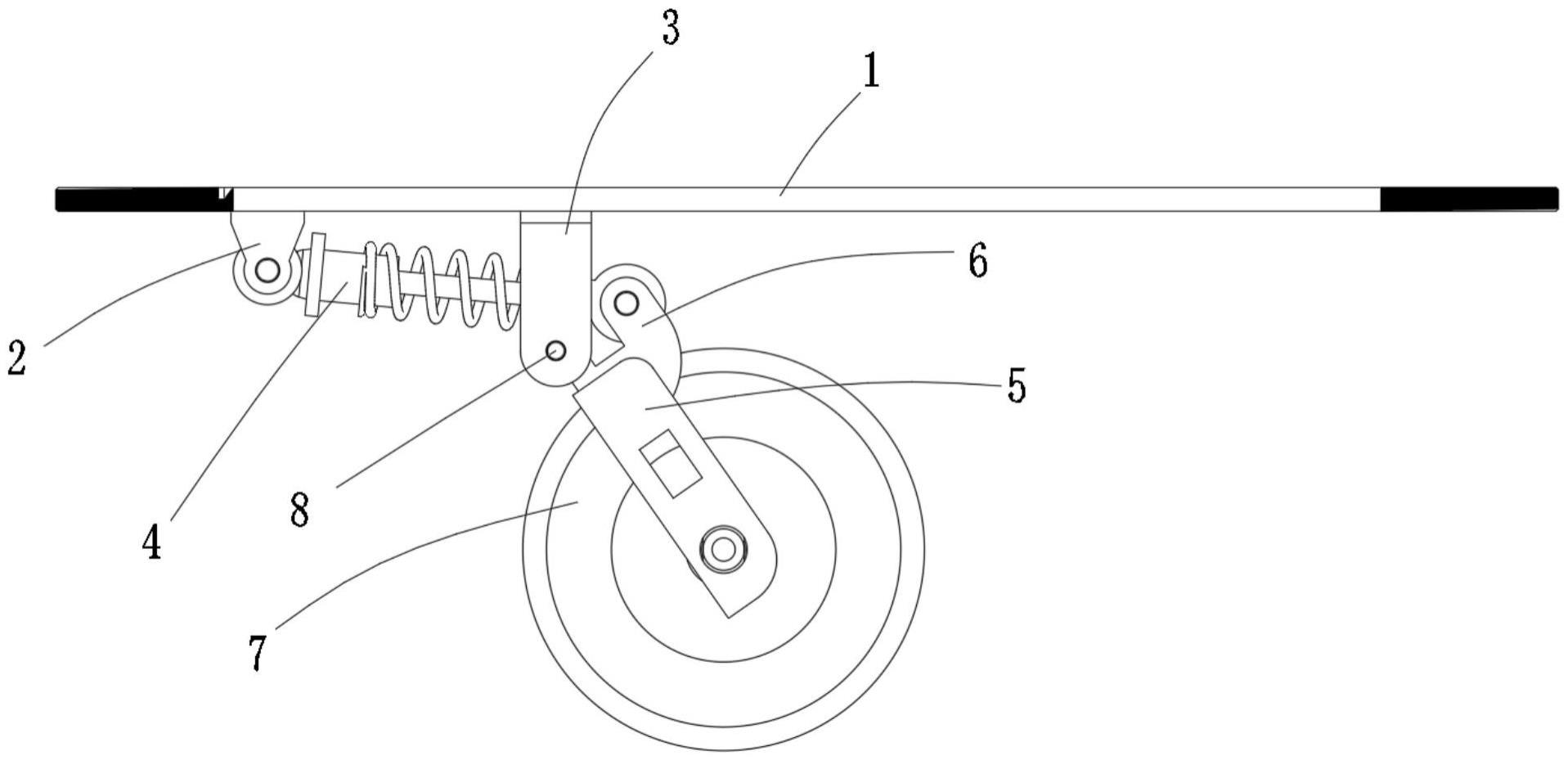
3、一种基于工业应用机器人的动力轮的避震机构,包括底盘支架,所述底盘支架底面分别安装有第一固定座和第二固定座,所述第二固定座的底部转动连接有与滚轮进行安装的滚轮支架,所述滚轮支架顶部一侧设置有侧支架,所述第一固定座与侧支架之间设置有用于减震的减震结构。
4、优选的,所述减震结构包括转动连接在第一固定座底部的第一安装轴,所述侧支架铰接有第二安装轴,所述第二安装轴连接有与第一安装轴滑动连接的导向轴,所述导向轴外表面套有弹簧。
5、优选的,所述第一安装轴外表面固定设置有挡片,且弹簧位于挡片与第二安装轴之间。
6、优选的,所述滚轮支架与第二固定座之间设置有用于二者铰接的转轴。
7、优选的,所述第二固定座呈“u”形状。
8、优选的,所述减震结构可以为油压缓冲器。
9、本实用新型具有以下优点:
10、1、本实用新型通过在滚轮支架铰接在第二固定座上的基础上在第一固定座和侧支架之间设置减震结构,当滚轮支架受到来自滚轮的冲击力时候,由于滚轮支架被第二固定座铰接,则滚轮支架会沿着转轴为旋转中心进行转动,从而将将冲击力传动至侧支架,进而使侧支架向靠近第一固定座的方向移动,从而使侧支架上的力传递到减震结构并使减震结构受到挤压,从而减震结构将受到的力吸收,进而达到减震的效果,并且该结构能够大大提高底盘支架与底面的高度,使其能够通过更大的坑/坎。
11、2、本实用新型通过弹簧的收缩来吸收来自滚轮通过坑/坎时候的冲击力,当弹簧从压缩状态返回初始状态时会向侧支架产生一个反作用力,该力会通过滚轮支架作用于滚轮,使滚轮具有一个作用力作为摩擦力为动力。
技术特征:
1.一种基于工业应用机器人的动力轮的避震机构,包括底盘支架(1),其特征在于:所述底盘支架(1)底面分别安装有第一固定座(2)和第二固定座(3),所述第二固定座(3)的底部转动连接有与滚轮(7)进行安装的滚轮支架(5),所述滚轮支架(5)顶部一侧设置有侧支架(6),所述第一固定座(2)与侧支架(6)之间设置有用于减震的减震结构(4)。
2.根据权利要求1所述的一种基于工业应用机器人的动力轮的避震机构,其特征在于:所述减震结构(4)包括转动连接在第一固定座(2)底部的第一安装轴(41),所述侧支架(6)铰接有第二安装轴(43),所述第二安装轴(43)连接有与第一安装轴(41)滑动连接的导向轴(44),所述导向轴(44)外表面套有弹簧(45)。
3.根据权利要求2所述的一种基于工业应用机器人的动力轮的避震机构,其特征在于:所述第一安装轴(41)外表面固定设置有挡片(42),且弹簧(45)位于挡片(42)与第二安装轴(43)之间。
4.根据权利要求1所述的一种基于工业应用机器人的动力轮的避震机构,其特征在于:所述滚轮支架(5)与第二固定座(3)之间设置有用于二者铰接的转轴(8)。
5.根据权利要求1所述的一种基于工业应用机器人的动力轮的避震机构,其特征在于:所述第二固定座(3)呈“u”形状。
6.根据权利要求1所述的一种基于工业应用机器人的动力轮的避震机构,其特征在于:所述减震结构(4)可以为油压缓冲器。
技术总结
本技术公开了一种基于工业应用机器人的动力轮的避震机构,包括底盘支架,所述底盘支架底面分别安装有第一固定座和第二固定座,所述第二固定座的底部转动连接有与滚轮进行安装的滚轮支架,所述滚轮支架顶部一侧设置有侧支架,所述第一固定座与侧支架之间设置有用于减震的减震结构。本技术的有益效果是:通过在滚轮支架铰接在第二固定座上的基础上在第一固定座和侧支架之间设置减震结构,当滚轮支架受到来自滚轮的冲击力时候,由于滚轮支架被第二固定座铰接,则滚轮支架会沿着转轴为旋转中心进行转动,从而将将冲击力传动至侧支架,进而使侧支架向靠近第一固定座的方向移动,从而使侧支架上的力传递到减震结构并使减震结构受到挤压。
技术研发人员:王海良,黄银伟,朱志华,余祖旺
受保护的技术使用者:厦门攸信信息技术有限公司
技术研发日:20230227
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!