夹持装置及汽车搬运机器人的制作方法
本技术涉及汽车搬运设备,特别涉及一种夹持装置及汽车搬运机器人。
背景技术:
1、在日常生活中,由于场地因素和司机个人技能的影响,泊车困难成为了一个日益明显的问题,为此人们发明了汽车搬运机器人,用以辅助人们进行泊车。其通过四对夹持臂对汽车的四个车轮进行前后夹持,并将汽车夹离地面,从而带动汽车进行搬运。
2、但现有的夹持臂刚性强度不足,且夹持臂对车轮进行前后夹持的时候,不能对车轮进行更好的固定,车轮的车轮会在两个夹持臂之间滑动,进而导致运送车辆过程中,车辆出现晃动,导致安全问题。
技术实现思路
1、本实用新型的一个目的在于解决传统的夹持臂夹持汽车轮胎不够稳定,汽车容易从夹持臂上滑落的技术问题。
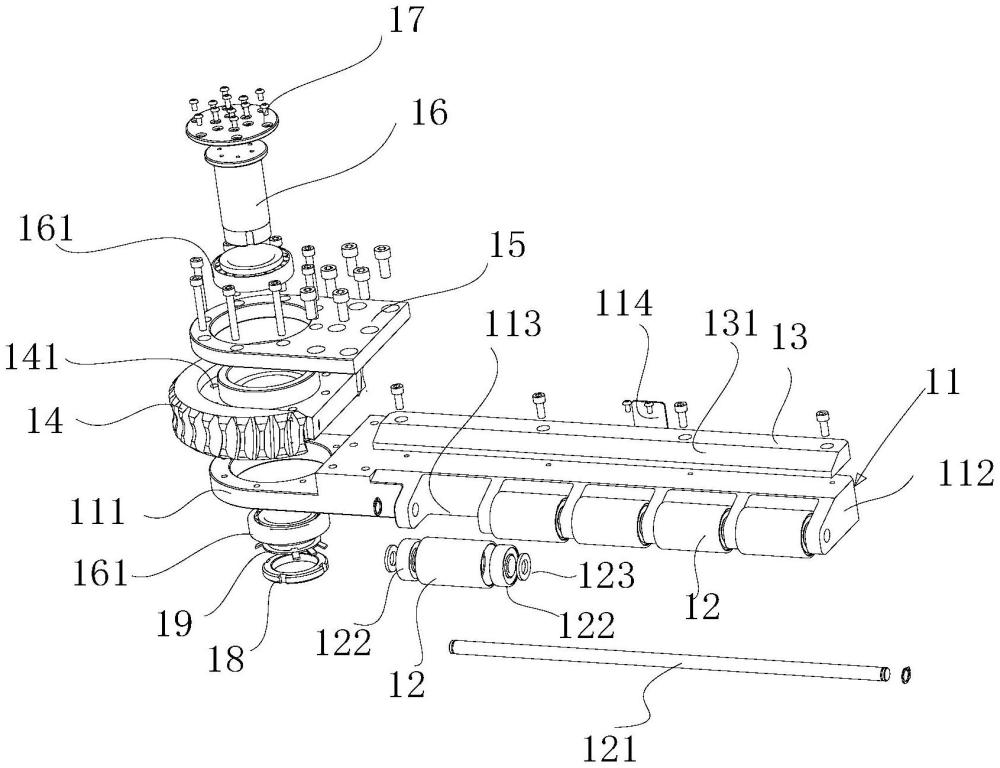
2、为解决上述技术问题,本实用新型提供一种夹持装置,包括设置在汽车搬运机器人的车体上的多组夹持臂,多组所述夹持臂可相对转动以将汽车轮胎夹紧;所述夹持臂包括:夹臂本体,包括夹臂板、滚轮以及挡板;所述夹臂板的一端设有第一通孔;所述滚轮转动连接在所述夹臂板的一侧,所述滚轮的转动轴线沿所述夹臂板的长度方向延伸;所述挡板设置在所述夹臂板设有所述滚轮一端的顶面,并沿所述夹臂板的长度方向延伸;所述挡板沿所述夹臂板顶面向上凸起,使所述挡板朝向所述滚轮的侧面凸起形成挡止面;涡轮,其中心设有第二通孔,所述涡轮固定连接在所述夹臂板设有第一通孔的一端,并使所述涡轮的第二通孔与所述夹臂板的第一通孔相对应;支撑转轴,穿设于所述夹臂板的第一通孔和所述涡轮的第二通孔内,并与所述涡轮转动连接,使所述涡轮和与所述涡轮固定连接的夹臂板能绕所述支撑转轴的轴线转动;以将所述汽车轮胎夹持。
3、可选地,所述夹臂板包括连接板和与所述连接板相接的悬臂板,所述第一通孔设置在所述连接板上;所述连接板的厚度小于所述悬臂板厚度,所述涡轮设置在所述连接板上。
4、可选地,所述夹持臂夹臂本体还包括夹臂压板,所述夹臂压板上设有与所述第一通孔对应的第三通孔;所述夹臂压板与所述悬臂板连接,所述夹臂压板与所述连接板之间的间隔形成安装位;所述涡轮设置所述夹臂压板与所述连接板之间的所述安装位上,并与所述夹臂压板和所述连接板固定连接。
5、可选地,所述涡轮的上下侧面均设有环形容置槽,所述环形容置槽形状与所述夹臂压板和所述连接板的形状相适配;所述夹臂压板和所述连接板均可容置于所述涡轮上下侧的所述环形容置槽中。
6、可选地,所述夹持臂还包括多个第一轴承;所述第一轴承设置在所述涡轮的第二通孔内;所述支撑转轴穿设在所述第一轴承中,以使所述涡轮和与所述涡轮固定的所述夹臂板能绕所述支撑转轴的轴线转动。
7、可选地,所述夹持臂还包括圆螺母和止推垫圈,所述圆螺母与所述支撑转轴螺纹连接;所述圆螺母的外侧面上开有多个定位槽,所述止推垫圈的外侧设有多个定位块,所述止推垫圈套设在所述支撑转轴上,并位于所述第一轴承与所述圆螺母之间,所述止推垫圈上的所述定位块可弯曲嵌入至所述圆螺母的所述定位槽中,以将所述圆螺母的转动锁止。
8、可选地,所述夹臂本体还包括连接轴;所述夹臂板的侧壁开设有多个安装槽,所述安装槽沿所述夹臂板的长度方向间隔布置,所述连接轴横向穿过多个所述安装槽,所述连接轴靠近所述夹臂板的底面一侧;所述滚轮设置在所述安装槽中,并与穿过所述安装槽的所述连接轴转动连接。
9、可选地,所述夹持装置还包括驱动组件,用于驱动所述夹持臂绕所述支撑转轴的轴线转动;所述驱动组件包括驱动件和蜗杆,所述驱动件的输出端与所述蜗杆连接,所述蜗杆与所述夹持臂的涡轮连接,所述驱动件带动所述蜗杆绕自身轴线转动,并驱动所述涡轮绕所述支撑转轴的轴线转动。
10、可选地,所述驱动组件还包括设置在所述蜗杆两端的轴承座,所述轴承座内设有轴承,所述蜗杆穿设在所述轴承座内的轴承上,以使所述蜗杆能绕自身轴线转动。
11、本申请还提供一种汽车搬运机器人,包括:车体;上述的夹持装置,所述夹持臂装置的所述夹持臂转动连接在所述车体上,所述夹持臂可相对转动对车轮进行夹持。
12、可选地,所述汽车搬运机器人还包括感应器和与所述感应器电连接的控制器;所述感应器设置在所述车体靠近所述夹持臂的一侧,所述夹持臂的夹臂板上设有与所述感应器相配合的感应片;所述感应器可感知是否与所述感应片接触信号,并将所述信号传输至所述控制器中,以判断所述夹持臂是否回转到位。
13、由上述技术方案可知,本实用新型的有益效果为:
14、本申请提供了一种夹持装置和汽车搬运机器人,夹持装置包括设置在搬运机器人上的多组夹持臂,每组夹持臂可相对转动将汽车轮胎夹紧。该夹持臂的夹臂板的侧面上转动连接有滚轮,滚轮沿夹臂板的长度方向布置。当两个夹持臂相互转动至工作状态时,夹臂板上的滚轮与车轮进行抵接,以对车轮的前后两侧进行夹持。并且在夹臂板设有滚轮的一端的顶面设置一个挡板且挡板沿夹臂板顶面向上凸起,使挡板面向滚轮的侧面形成一个向上凸起挡止面。当汽车轮胎夹持在两夹持臂之间时,挡板向上凸起以提高对轮胎的夹持深度,并且挡止面与轮胎的前后侧相互抵接,增加了摩擦力,可以防止轮胎的打滑,使汽车在夹持臂上的状态更加稳定,搬运汽车时更加安全。
技术特征:
1.一种夹持装置,包括设置在汽车搬运机器人的车体上的多组夹持臂,多组所述夹持臂可相对转动以将汽车轮胎夹紧;其特征在于,所述夹持臂包括:
2.根据权利要求1所述的夹持装置,其特征在于,所述夹臂板包括连接板和与所述连接板相接的悬臂板,所述第一通孔设置在所述连接板上;所述连接板的厚度小于所述悬臂板厚度,所述涡轮设置在所述连接板上。
3.根据权利要求2所述的夹持装置,其特征在于,所述夹持臂夹臂本体还包括夹臂压板,所述夹臂压板上设有与所述第一通孔对应的第三通孔;所述夹臂压板与所述悬臂板连接,所述夹臂压板与所述连接板之间的间隔形成安装位;所述涡轮设置所述夹臂压板与所述连接板之间的所述安装位上,并与所述夹臂压板和所述连接板固定连接。
4.根据权利要求3所述的夹持装置,其特征在于,所述涡轮的上下侧面均设有环形容置槽,所述环形容置槽形状与所述夹臂压板和所述连接板的形状相适配;所述夹臂压板和所述连接板均可容置于所述涡轮上下侧的所述环形容置槽中。
5.根据权利要求1所述的夹持装置,其特征在于,所述夹持臂还包括多个第一轴承;所述第一轴承设置在所述涡轮的第二通孔内;所述支撑转轴穿设在所述第一轴承中,以使所述涡轮和与所述涡轮固定的所述夹臂板能绕所述支撑转轴的轴线转动。
6.根据权利要求5所述的夹持装置,其特征在于,所述夹持臂还包括圆螺母和止推垫圈,所述圆螺母与所述支撑转轴螺纹连接;所述圆螺母的外侧面上开有多个定位槽,所述止推垫圈的外侧设有多个定位块,所述止推垫圈套设在所述支撑转轴上,并位于所述第一轴承与所述圆螺母之间,所述止推垫圈上的所述定位块可弯曲嵌入至所述圆螺母的所述定位槽中,以将所述圆螺母的转动锁止。
7.根据权利要求1所述的夹持装置,其特征在于,所述夹臂本体还包括连接轴;所述夹臂板的侧壁开设有多个安装槽,所述安装槽沿所述夹臂板的长度方向间隔布置,所述连接轴横向穿过多个所述安装槽,所述连接轴靠近所述夹臂板的底面一侧;所述滚轮设置在所述安装槽中,并与穿过所述安装槽的所述连接轴转动连接。
8.根据权利要求1所述的夹持装置,其特征在于,所述夹持装置还包括驱动组件,用于驱动所述夹持臂绕所述支撑转轴的轴线转动;所述驱动组件包括驱动件和蜗杆,所述驱动件的输出端与所述蜗杆连接,所述蜗杆与所述夹持臂的涡轮连接,所述驱动件带动所述蜗杆绕自身轴线转动,并驱动所述涡轮绕所述支撑转轴的轴线转动。
9.根据权利要求8所述夹持装置,其特征在于,所述驱动组件还包括设置在所述蜗杆两端的轴承座,所述轴承座内设有轴承,所述蜗杆穿设在所述轴承座内的轴承上,以使所述蜗杆能绕自身轴线转动。
10.一种汽车搬运机器人,其特征在于,包括:
11.根据权利要求10所述的汽车搬运机器人,其特征在于,所述汽车搬运机器人还包括感应器和与所述感应器电连接的控制器;所述感应器设置在所述车体靠近所述夹持臂的一侧,所述夹持臂的夹臂板上设有与所述感应器相配合的感应片;所述感应器可感知是否与所述感应片接触信号,并将所述信号传输至所述控制器中,以判断所述夹持臂是否回转到位。
技术总结
本技术涉及一种夹持装置及汽车搬运机器人,属于汽车搬运设备技术领域。夹持装置包括设置在汽车搬运机器人的车体上的多组夹持臂;该夹持臂包括夹臂本体,涡轮和支撑转轴。夹臂本体包括夹臂板、滚轮以及挡板;夹臂板的一端设有第一通孔,滚轮转动连接在夹臂板的一侧,挡板设置在夹臂板设有滚轮一端的顶面,并沿夹臂板顶面向上凸起;使挡板朝向滚轮的侧面凸起形成挡止面;涡轮与夹臂板固定连接,使涡轮的第二通孔与夹臂板的第一通孔相对;支撑转轴穿设于第一通孔和所述第二通孔之间,并与涡轮转动连接,使夹臂板上的滚轮和挡板与轮胎抵接,将汽车轮胎夹紧固定。其解决传统的夹持臂夹持汽车轮胎不够稳定,汽车容易从夹持臂上滑落的技术问题。
技术研发人员:黄涛,程宏达,钟志祥
受保护的技术使用者:中集物联科技有限公司
技术研发日:20230717
技术公布日:2024/2/21
- 还没有人留言评论。精彩留言会获得点赞!