在用于自动驾驶的冗余系统中用于解耦和防止补偿电流的设备的制作方法
本发明涉及一种在用于自动驾驶的冗余系统中用于解耦和防止补偿电流的设备。
背景技术:
1、在高度自动化或者自动驾驶的车辆中(例如高度自动化或者自动驾驶的载货车),驾驶员辅助系统代替驾驶员控制车辆并且还监控车辆的周围环境。根据sae(机动车工程师协会),将驾驶员辅助系统分为六级(0至5)。特别是在没有随时准备干预的驾驶员的情况下至少暂时地实施自动驾驶功能的车辆中(在从等级或者说级别3——该等级或者说级别涉及高度自动化行驶——起的辅助功能中,基础系统在特定的应用情况下接管纵向引导和横向引导、识别系统极限并且要求驾驶员以充分的时间余量接管。驾驶员无须再持续地监视车辆或者系统,但是潜在地能够接管控制),即使在电气控制回路中发生故障的情况下,制动系统还能够操控执行器、例如压力控制阀(pcv,pressure control valves),以便即使在故障情况下还能够实施电控功能、例如abs(防抱死制动系统)、esp(电子稳定程序)、转向制动器和诸如此类。然而在故障情况下,例如在组件失灵的情况下可能出现驾驶员不再能够或者至少不再能够充分迅速地干预并且接管对车辆的控制。出于这个原因,必须立刻由备用控制器接管所述功能。因此,对于安全关键的电子系统进行冗余设计。
2、因此出于安全原因,对关键的电子系统进行冗余地设计。例如通过多个、例如两个独立的电压源确保供电冗余,所述电压源通常共享一个共同的接地线,或者在车辆中设置多个、例如两个独立的用于制动控制的电气控制回路,所述电气控制回路具有共同的接地线(车辆接地线)的。
3、在压缩空气制动系统中,这特别是涉及对制动系统的电子器件(即控制器)以及对电动气动式执行器(例如电磁阀或者压力控制阀)的操控。在已知的系统中通过两个单独的控制器将电子器件设计为冗余的,而在许多电动气动式的阀中将一个阀与两个冗余的制动系统控制器共同连接并且根据情况地由其中一个控制器或者另一个控制器实施对这样的阀进行操控就足够了。
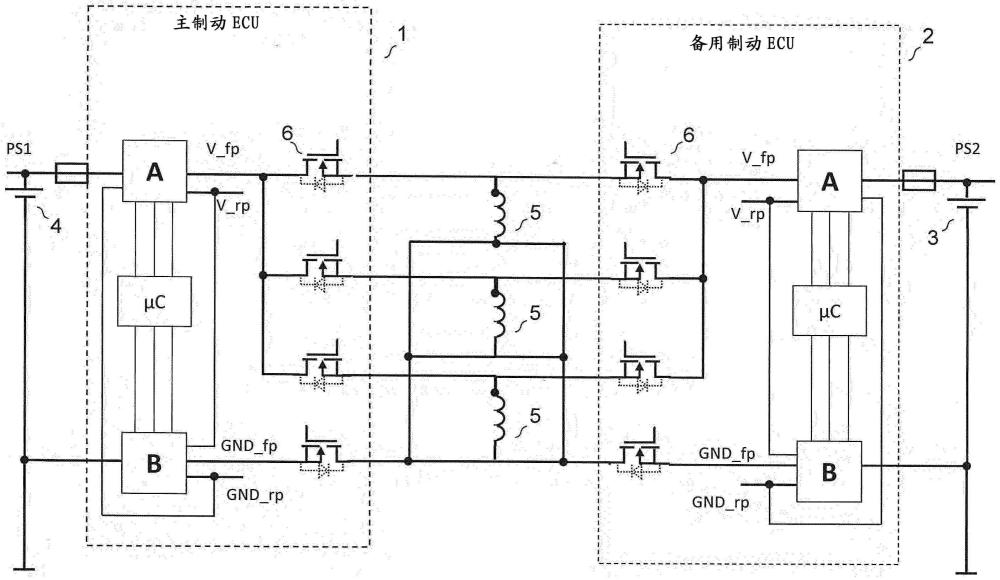
4、图1示意性地和局部地示出具有两个制动控制器的系统的结构,其中第一制动控制器是主制动控制器,而第二制动控制器是备用制动控制器,它们共同动用电磁阀的线圈。所述线圈通过半导体驱动器或者半导体开关操控,所述半导体驱动器或者半导体开关全部通过一个共同的供电路径和接地路径供电。示意性地示出导线保护装置。
5、由于通过共用的电磁阀的触点进行连接,在所述两个电压源之间可能不利地出现补偿电流。这样的补偿电流的原因在于在各电压源之间的电压差或者接地偏移(通常gnd1与gnd2相等,然而在某些情况下可能出现接地偏移,亦即在各接地输入端之间的电压差)。于是,电流流经一个控制器中的已接通的mosfet(金属氧化物半导体场效应晶体管)和另一个控制器中的mosfet的反向二极管或者体二极管。
6、图2示例性地示出在具有共用的电磁阀而没有另外的保护措施的系统中出现补偿电流。在图2中例如用实线示意性示出所期望的电流,而用虚线示出可能的补偿电流。
7、此外,在存在多个独立的用于制动控制的控制回路的情况下必须确保在各操控回路的一个操控回路中的故障情况不对其他操控回路产生不利影响。特别是不允许一个单独的故障导致所有、例如两个操控回路同时失灵。
8、在已知的设备中,压力控制阀例如在电气方面包括两个电磁阀,所述电磁阀具有一个共同的连接端和各一个自身的连接端。进行操控的电子控制单元具有如下开关,利用该开关能够接通所有电磁阀的共同的连接端,以及进行操控的电子控制单元分别具有用于电磁阀中的每一个电磁阀的专用的开关,以便能够对这些电磁阀单独通电。
9、所述开关可以构造为电子输出级,所述电子输出级由电子控制单元的逻辑单元控制。在此,在将电磁阀的馈电线与正电位(+)相连接的输出级(高压侧)和将电磁阀的返回导线与负电位(-)或者接地电位相连接的输出级(低压侧)之间进行区分。将用于多个电磁阀的两个路径中的一个路径共同接通的输出级可以是高压侧输出级或者低压侧输出级(共地,common ground)。以下简化地假设为负极侧或者说低压侧连接端。必需存在两侧的关断可能性,以便即使在各馈电线中的一个馈电线相对于电源或者接地线短路的情况下,或者由于短路的(“熔合的(durchlegiert)”)、亦即在例如漏极与源极之间由于温度过热而短路的(具有短路故障的)和因此损坏的输出级也排除对电磁阀的非期望的通电。
10、为了及时识别出其他的故障,特别是在馈电线与返回导线之间的短路、在返回导线与电源之间的短路和在返回导线与接地线之间的短路以及电缆断裂,对电气值(在连接端上的电压、过大的电流)通常进行长期监控以及将测试脉冲不时地发射到磁体上并对其电气响应进行评估。
11、然而如果压力控制阀由两个或者更多个电子控制单元操控,当所述电子控制单元中的一个电子控制单元将测试脉冲发射到磁体上时,则在另一个电子控制单元中的长期监控将起作用并错误地识别出故障。此外,当两个电气回路具有一个共同的接地线(-)时,在两个进行控制的电子控制单元之间的接地偏移导致所述电子控制单元中的一个或者两个损坏。此外,当有缺陷的电子控制单元例如由于故障与其供电电压断开时,所述有缺陷的电子控制单元可能被非期望地“反向”供电,或者当在有缺陷的电子控制单元中存在其电源对地短路时,从完好的电子控制单元流向电磁阀的电流可能短路,因为当所述第二电子控制单元接通电磁阀时,有缺陷的电子控制单元的高压侧输出级的寄生二极管允许电流从完好的电子控制单元通过。这可能导致非期望地且潜在危险地激活有缺陷的第一电子控制单元和/或阻止接通所涉及的压力控制阀的电磁阀,或者由于过高的电流还损坏第二电子控制单元并且由此消除必要的冗余。
12、如果在一个电子控制单元中用于对电磁阀单独通电的输出级短路,则仅这个电子控制单元将相应的反极性的共同的输出级关断是不够的,因为在这种情况下电流将流经另一个电子控制单元的反极性的共同的输出级并且非期望地激活电磁阀。
技术实现思路
1、基于上述问题,本发明的目的在于,在具有电磁阀、共用的冗余的控制器的压缩空气制动系统中在即使没有电隔离且在遵守安全要求的情况下通过所述控制器防止在电压源之间的补偿电流。此外,本发明在压缩空气制动系统中应该确保在一个操控回路中的故障情况不对另一个操控回路产生影响。
2、按照本发明,该目的通过权利要求1的特征得以实现。
3、本发明的总体构思在于,在用于自动驾驶的冗余系统中当两个独立供电的控制器共用电气执行器时用于解耦和防止补偿电流的设备。在模块化的方案中,本发明包含电路模块(a和b),所述电路模块能够对常规的控制器进行补充,并且所述电路模块与控制器相组合地在共用的情况下提供防止补偿电流和反向耦合的保护。
4、用于解耦和防止补偿电流的设备包含两个模块(半导体电路模块)和/或二极管或者在功能上与此等效的元件或者组件,这些作为电流截止装置配置用于,连接到正路径和接地路径中并且这些能实现即使在没有电隔离且在遵守安全要求的情况下通过控制器防止在电压源之间的补偿电流和其他非预期的电流。
5、所述模块优选设计为直接插入到供电路径或者接地路径中的开关装置或者开关。所述模块通过多个控制导线操纵。当所有控制导线激活时,模块作用为接通的开关。否则,所述模块保持如断开的开关那样的状态,其中模块的内部电路布置结构提供上述的保护功能。
6、此外,所述模块能在不同的扩充级(ausbaustufe)中实现,这些扩充级能分别配置用于相应的安全要求。所述模块例如可以配置用于,满足较简单至提高的安全要求、例如针对内部mosfet的各个短路的预先确定的公差或者针对在位于下游的高压侧或者低压侧电磁阀驱动器中的短路的预先确定的公差。此外,所述模块优选还为非共用的且仅需要防止控制器供电电压的反极性的电路部分提供抽头(abgriff)。
7、按照本发明的用于解耦和/或用于防止补偿电流的设备,所述设备用于在用于自动驾驶的冗余系统中由多个独立供电的控制器装置共用至少一个电气执行器的情况下使用,规定所述至少一个电气执行器分别具有:一个共同的连接端,所述至少一个电气执行器经由所述共同的连接端与另外的电气执行器的共同的连接端能耦联和能切换;以及至少一个专用的连接端,通过所述专用的连接端能够给所述至少一个电气执行器单独通电;多个控制器装置具有:至少一个第一控制器装置,所述第一控制器装置具有第一电子控制单元和与所有电气执行器的所述共同的连接端和专用的连接端的数量相对应的第一数量的开关装置;和至少一个第二控制器装置,所述第二控制器装置具有第二电子控制单元和与所有电气执行器的所述共同的连接端和专用的连接端的数量相对应的第二数量的开关装置,并且所述至少一个第一和第二控制器装置设置用于,通过开关装置切换式地将电流引入或者不引入到所述至少一个电气执行器中。至少一个电流截止装置配置用于,当第一和第二控制器装置中的一个控制器装置切换式地将电流引入到所述至少一个电气执行器中时,禁止由该引入产生的电流流向所述第一和第二控制器装置中的另一个控制器装置的电子控制单元。
8、通过如上述按照本发明的特征特别是有利地防止电压偏移或者接地偏移而导致用于自动驾驶的冗余设计的系统(例如制动设备)中的控制器和/或电子控制单元之间的非预期的电流,由此又有利地防止:由于非期望的电流而引起所述电子控制单元中的一个或者全部电子控制单元损伤或者损坏,或者当有缺陷的电子控制单元例如由于故障而与其供电电压断开时,所述有缺陷的电子控制单元又被非期望地“反向”供电,或者当有缺陷的电子控制单元其电源对地短路或者其接地线相对供电电压短路时,从完好的电子控制单元至电磁阀的电流短路。利用按照本发明的特征,即使在故障情况下或者在电压状况和/或接地状况不适当的情况下也能够总体上有利地保持对于自动驾驶所需的冗余。
9、通过在从属权利要求中说明的措施能够实现在独立权利要求中给出的本发明的有利的进一步经扩展方案和改进。
10、根据本发明,所述第一和第二控制器装置包括具有第一电子控制单元的主制动控制器和具有第二电子控制单元的备用制动控制器,并且所述至少一个电气执行器包括电磁阀或者包含电磁阀的压力控制模块,所述第一和第二控制器装置设置用于共同动用电磁阀和压力控制模块的线圈,所述线圈配置用于通过开关装置操控,并且所述开关装置包含半导体开关,所述半导体开关配置用于通过共同的供电路径和接地路径供电。
11、根据本发明,所述开关装置配置为电子输出级,所述电子输出级设置用于由第一或者第二电子控制单元的逻辑单元控制,输出级分别是将电气执行器的馈电线与正电位相连接的输出级,或者是将电气执行器的返回导线与负电位或者接地电位相连接的输出级。
12、特别优选地,所述电流截止装置构成为第一补偿电流保护模块和第二补偿电流保护模块,这些补偿电流保护模块分别配置为进行切换的半导体电路模块并且配置用于连接到正路径和接地路径中并且通过控制器装置防止在电压源之间补偿电流。
13、还特别优选地,所述第一补偿电流保护模块具有:输入端;三个单独的控制输入端,用于操控在所述模块中提供的进行切换的mosfet的mosfet栅极操控部中的内部控制开关;完全受保护的输出端;提供反极性保护的输出端;接地连接端;以及电荷泵,为了防止由于mosfet的个别短路故障导致的失灵,栅极操控导线构成为相互解耦的。
14、还特别优选地,所述第二补偿电流保护模块具有:输入端;用于操控在所述模块中提供的进行切换的mosfet的mosfet栅极操控部中的内部控制开关的三个单独的输入端;完全受保护的输出端;提供反极性保护的输出端;和接地连接端,为了防止由于mosfet的个别短路故障导致的失灵,栅极操控导线构成为相互解耦的。
15、在此有利地规定,在第一和第二补偿电流保护模块中mosfet在模块内部的定向通过所述mosfet在用于所述至少一个电气执行器的驱动器的位于下游的高压侧和低压侧驱动器中的定向确定,并且所述第一和第二补偿电流保护模块的mosfet这样的布线使得两个相应的mosfet的两个体二极管反向地连接并且提供防止反向电流的直接保护,并且第一和第二补偿电流保护模块的第三mosfet如下地定向,使得所述第三mosfet提供冗余的反向电流保护。
16、进一步优选地,所述电流截止装置可以构成为设置在所述开关装置中的每个开关装置的连接端上的二极管。
17、在这种情况下优选地,所述二极管可以设置在第一和第二控制器之内或者第一和第二控制器之外。
18、备选地,在这种情况下优选地,多个二极管可以设置在与每个单独的二极管等效运行的构成t形件的二极管电路布置结构中。
19、又备选地,在这种情况下优选地,二极管作为电流截止装置可以设置在开关装置与相应电子控制单元之间的各一个共同的电流路径区段中。
20、又备选地,在这种情况下优选地,在供电电位侧在开关装置与第一和第二电子控制单元之间的共同的电流路径区段中设置有反向极化的且主动切换的输出级作为电流截止装置,以及在接地电位侧在开关装置与第一和第二电子控制单元之间的共同的电流路径区段中设置有二极管作为电流截止装置。
21、又备选地,在这种情况下优选地,在供电侧在开关装置与第一和第二电子控制单元之间的共同的电流路径区段中设置有反向极化的且主动切换的输出级作为电流截止装置,以及在接地电位侧在开关装置与第一和第二电子控制单元之间的共同的电流路径区段中设置有反向极化的且主动切换的输出级作为电流截止装置。
22、此外,在所述设备中还优选且有利的是,所述第一和第二电子控制单元可以配置用于,当无须给电气执行器通电时,不仅截止正极导线的、而且截止接地导线的开关装置;在与预先确定的标准相符合的无故障运行中限定地仅第一和第二电子控制单元中的一个控制单元接管对所述至少一个电气执行器的操控;第一和第二电子控制单元的处于非活动的状态中的电子控制单元配置用于,为了测试目的,不实施对电气执行器的主动通电;并且处于非活动的状态中的电子控制单元配置用于,在第一和第二电子控制单元的活动的控制单元的故障情况(所述故障情况阻碍所述活动的控制单元继续运行)下,转换到活动的状态中的且作为新的活动的电子控制单元代替易出故障的电子控制单元从此以后接管对电气执行器的操控;其中,处于非活动的状态中的电子控制单元配置用于,对所述处于非活动的状态中的电子控制单元的至所述至少一个电气执行器的导线上的电压电平和/或电流电平进行监控,所述监控利用从活动的电子控制单元传递到所述处于非活动的状态中的电子控制单元上的关于所述至少一个电气执行器的目前操控的信息来验证;并且对电流截止装置的可靠截止进行监控。
23、本发明不仅涉及上述在用于自动驾驶的冗余系统中用于解耦和防止补偿电流的设备,而且涉及一种用于控制和/或用于运行这样的设备的方法。如上面已经阐述的那样,所述设备能够安装在其中并且可实施所述方法的制动设备在此能够电气、液压、气动、电动液压或者电动气动地操纵。该制动设备可以是乘用车或者载货车(牵引车和/或挂车)的制动设备,并且可以是任意类型和特别是电气、液压、气动、电动液压或者电动气动地操作。就这点而言,本发明扩展到所有类型的车辆,特别是也扩展到乘用车、载货车或者重型载货车。
24、所述控制器装置可以由单独的控制器形成,亦或由已有的电子控制器形成,特别是由车辆控制器、制动装置的制动控制器或者由电动气动式制动控制模块的控制器形成。
25、由说明书和附图得出本发明的有利的进一步经扩展方案。各特征和多个特征组合的在说明书开头中提到的优点仅是示例性的,并且可以替代地或者累积地起作用,而无须强制性地从按照本发明的实施方式实现这些优点。
26、另外的特征可以从附图、特别是从多个构件的所示出的几何形状和相互关系以及它们的相对布置结构和作用连接中得出。本发明的不同实施方式的特征组合或者不同权利要求的特征组合同样可以与各权利要求的所选择的引用关系不同并且借此予以提倡。这也涉及在单独的附图中示出的或者在对附图的说明中提到的特征。这些特征也可以与不同权利要求的特征相组合。同样地,在权利要求书中列举的特征对于本发明的另外的实施方式来说也可以省略。
27、相同的或者起同样作用的构件和组件在不同的实施方式中分别标记有同一附图标记。
- 还没有人留言评论。精彩留言会获得点赞!