一种车辆控制方法、装置、计算机设备及存储介质与流程
本公开涉及车辆,具体而言,涉及一种车辆控制方法、装置、计算机设备及存储介质。
背景技术:
1、目前,电动汽车的驱动防滑主要依靠车辆配置的牵引力控制系统(tractioncontrol system,tcs)。tcs系统通过监控车辆的滑移率,并在检测到车辆滑移时,通过降低车辆的驱动力来进行防滑控制。然而tcs系统在进行滑移控制时,可能会出现由于车辆驱动力降幅过大,而导致车辆明显顿挫的问题,影响驾驶体验。
技术实现思路
1、本公开实施例至少提供一种车辆控制方法、装置、计算机设备及存储介质。
2、第一方面,本公开实施例提供了一种车辆控制方法,包括:
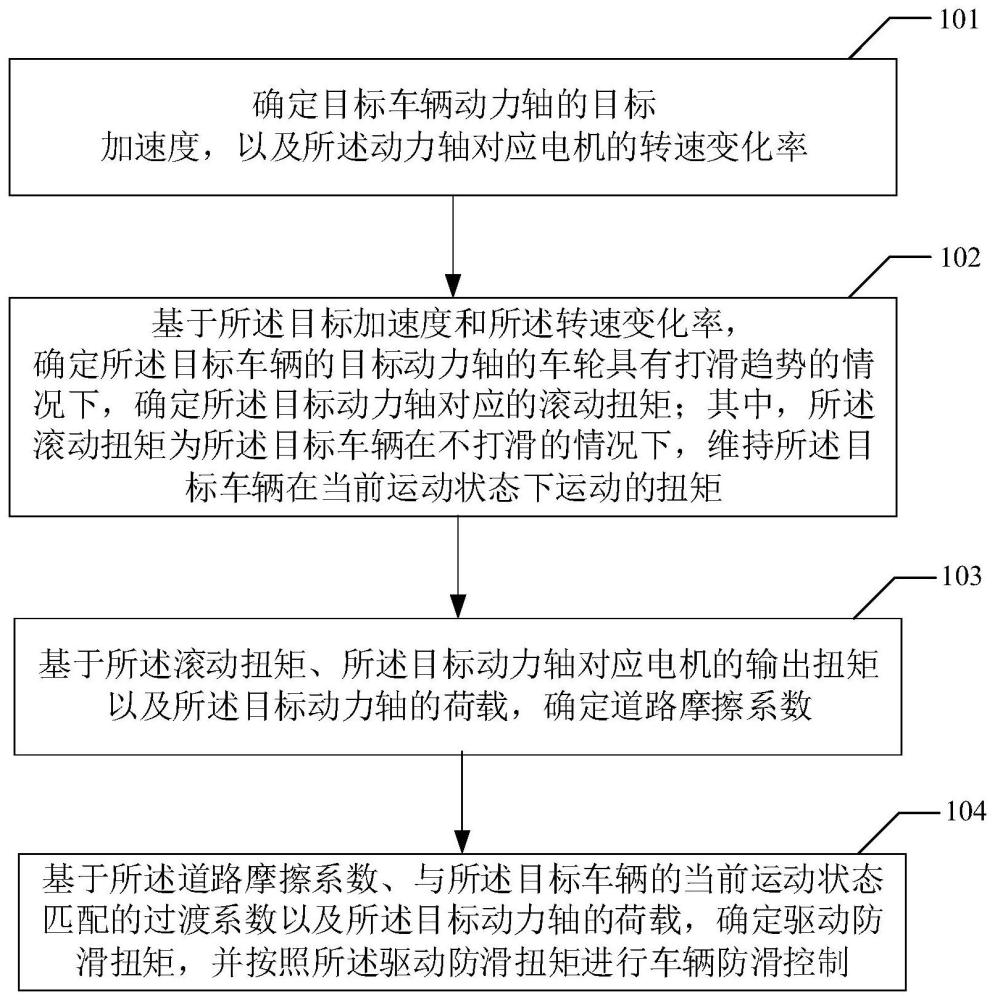
3、确定目标车辆动力轴的目标加速度,以及所述动力轴对应电机的转速变化率;
4、基于所述目标加速度和所述转速变化率,确定所述目标车辆的目标动力轴的车轮具有打滑趋势的情况下,确定所述目标动力轴对应的滚动扭矩;其中,所述滚动扭矩为所述目标车辆在不打滑的情况下,维持所述目标车辆在当前运动状态下运动的扭矩;
5、基于所述滚动扭矩、所述目标动力轴对应电机的输出扭矩以及所述目标动力轴的荷载,确定道路摩擦系数;
6、基于所述道路摩擦系数、与所述目标车辆的当前运动状态匹配的过渡系数以及所述目标动力轴的荷载,确定驱动防滑扭矩,并按照所述驱动防滑扭矩进行车辆防滑控制。
7、一种可能的实施方式中,所述方法还包括根据以下方法确定所述目标车辆的目标动力轴的车轮具有打滑趋势:
8、确定所述目标车辆的车辆加速度;
9、在所述目标加速度和所述转速变化率满足预设条件,且满足预设条件的时长达到预设时长的情况下,确定所述目标车辆的目标动力轴的车轮具有打滑趋势;
10、其中,所述预设条件为所述目标加速度与所述车辆加速度之间的加速度差超过第一阈值,且所述转速变化率超过第二阈值。
11、一种可能的实施方式中,所述确定所述目标动力轴对应的滚动扭矩,包括:
12、确定所述目标动力轴的轮端滚动扭矩,以及确定所述目标动力轴对应电机的电机转动扭矩;其中,所述轮端转动扭矩为维持所述目标动力轴以当前运动状态进行运动的扭矩,所述电机转动扭矩为维持所述电机以当前运动状态进行运动的扭矩;
13、基于所述轮端转动扭矩和所述电机转动扭矩,确定所述滚动扭矩。
14、一种可能的实施方式中,所述确定所述目标动力轴的轮端滚动扭矩,包括:
15、基于安装在所述目标动力轴的车轮半径、在所述目标加速度和所述转速变化率满足所述预设条件的开始时刻的第一轮速,以及所述开始时刻之后的预设时长后的第二轮速,确定所述车轮的角加速度;
16、基于所述角加速度和车轮转动惯量,确定所述目标动力轴的轮端转动扭矩;
17、所述确定所述目标动力轴对应电机的电机转动扭矩,包括:
18、基于所述角加速度、所述目标车辆的速比以及所述目标动力轴对应电机的电机转动惯量,确定所述电机对应的电机转动扭矩。
19、一种可能的实施方式中,所述基于所述滚动扭矩、所述目标动力轴对应电机的输出扭矩以及所述目标动力轴的荷载,确定道路摩擦系数,包括:
20、确定所述目标动力轴对应电机,在所述目标加速度和所述转速变化率满足所述预设条件的开始时刻的第一输出扭矩,以及所述开始时刻之后的预设时长后的第二输出扭矩;
21、基于所述第一输出扭矩和所述第二输出扭矩,确定所述电机在所述预设时长内输出的平均输出扭矩;
22、基于所述平均输出扭矩和所述滚动扭矩,确定可能会引起滑移的滑移扭矩;
23、基于所述滑移扭矩和所述目标动力轴的荷载,确定所述道路摩擦系数。
24、一种可能的实施方式中,所述目标车辆的当前运动状态包括车轮的当前轮速和/或当前加速度,以及包括电机的当前转速和/或当前转速变化率。
25、一种可能的实施方式中,所述按照所述驱动防滑扭矩进行车辆防滑控制,包括:
26、确定所述目标车辆的汽车电子稳定控制系统请求的稳定防滑扭矩;
27、基于所述驱动防滑扭矩和所述稳定防滑扭矩,确定目标扭矩,并基于所述目标扭矩控制所述目标动力轴对应的电机,以进行车辆防滑控制。
28、第二方面,本公开实施例还提供一种车辆控制装置,包括:
29、第一确定模块,用于确定目标车辆动力轴的目标加速度,以及所述动力轴对应电机的转速变化率;
30、打滑预估模块,用于基于所述目标加速度和所述转速变化率,确定所述目标车辆的目标动力轴的车轮具有打滑趋势的情况下,确定所述目标动力轴对应的滚动扭矩;其中,所述滚动扭矩为所述目标车辆在不打滑的情况下,维持所述目标车辆在当前运动状态下运动的扭矩;
31、第二确定模块,用于基于所述滚动扭矩、所述目标动力轴对应电机的输出扭矩以及所述目标动力轴的荷载,确定道路摩擦系数;
32、防滑控制模块,用于基于所述道路摩擦系数、与所述目标车辆的当前运动状态匹配的过渡系数以及所述目标动力轴的荷载,确定驱动防滑扭矩,并按照所述驱动防滑扭矩进行车辆防滑控制。
33、一种可能的实施方式中,所述打滑预估模块,用于根据以下方法确定所述目标车辆的目标动力轴的车轮具有打滑趋势:
34、确定所述目标车辆的车辆加速度;
35、在所述目标加速度和所述转速变化率满足预设条件,且满足预设条件的时长达到预设时长的情况下,确定所述目标车辆的目标动力轴的车轮具有打滑趋势;
36、其中,所述预设条件为所述目标加速度与所述车辆加速度之间的加速度差超过第一阈值,且所述转速变化率超过第二阈值。
37、一种可能的实施方式中,所述打滑预估模块,在确定所述目标动力轴对应的滚动扭矩时,用于:
38、确定所述目标动力轴的轮端滚动扭矩,以及确定所述目标动力轴对应电机的电机转动扭矩;其中,所述轮端转动扭矩为维持所述目标动力轴以当前运动状态进行运动的扭矩,所述电机转动扭矩为维持所述电机以当前运动状态进行运动的扭矩;
39、基于所述轮端转动扭矩和所述电机转动扭矩,确定所述滚动扭矩。
40、一种可能的实施方式中,所述打滑预估模块,在确定所述目标动力轴的轮端滚动扭矩时,用于:
41、基于安装在所述目标动力轴的车轮半径、在所述目标加速度和所述转速变化率满足所述预设条件的开始时刻的第一轮速,以及所述开始时刻之后的预设时长后的第二轮速,确定所述车轮的角加速度;
42、基于所述角加速度和车轮转动惯量,确定所述目标动力轴的轮端转动扭矩;
43、所述打滑预估模块,在确定所述目标动力轴对应电机的电机转动扭矩时,用于:
44、基于所述角加速度、所述目标车辆的速比以及所述目标动力轴对应电机的电机转动惯量,确定所述电机对应的电机转动扭矩。
45、一种可能的实施方式中,所述第二确定模块,在基于所述滚动扭矩、所述目标动力轴对应电机的输出扭矩以及所述目标动力轴的荷载,确定道路摩擦系数时,用于:
46、确定所述目标动力轴对应电机,在所述目标加速度和所述转速变化率满足所述预设条件的开始时刻的第一输出扭矩,以及所述开始时刻之后的预设时长后的第二输出扭矩;
47、基于所述第一输出扭矩和所述第二输出扭矩,确定所述电机在所述预设时长内输出的平均输出扭矩;
48、基于所述平均输出扭矩和所述滚动扭矩,确定可能会引起滑移的滑移扭矩;
49、基于所述滑移扭矩和所述目标动力轴的荷载,确定所述道路摩擦系数。
50、一种可能的实施方式中,所述目标车辆的当前运动状态包括车轮的当前轮速和/或当前加速度,以及包括电机的当前转速和/或当前转速变化率。
51、一种可能的实施方式中,所述防滑控制模块,在按照所述驱动防滑扭矩进行车辆防滑控制时,用于:
52、确定所述目标车辆的汽车电子稳定控制系统请求的稳定防滑扭矩;
53、基于所述驱动防滑扭矩和所述稳定防滑扭矩,确定目标扭矩,并基于所述目标扭矩控制所述目标动力轴对应的电机,以进行车辆防滑控制。
54、第三方面,本公开实施例还提供一种计算机设备,包括:处理器、存储器和总线,所述存储器存储有所述处理器可执行的机器可读指令,当计算机设备运行时,所述处理器与所述存储器之间通过总线通信,所述机器可读指令被所述处理器执行时执行上述第一方面,或第一方面中任一种可能的实施方式中的步骤。
55、第四方面,本公开实施例还提供一种计算机可读存储介质,该计算机可读存储介质上存储有计算机程序,该计算机程序被处理器运行时执行上述第一方面,或第一方面中任一种可能的实施方式中的步骤。
56、本公开实施例提供的车辆控制方法、装置、计算机设备及存储介质中,可以在车辆打滑之前,在基于目标车辆的目标动力轴的目标加速度和转速变化率预测到目标动力轴的车轮具有打滑趋势的情况下,确定目标动力轴对应的滚动扭矩,并基于所述滚动扭矩、所述目标动力轴对应电机的输出扭矩以及所述目标动力轴的荷载,确定道路摩擦系数,然后再基于所述道路摩擦系数、与所述目标车辆的当前运动状态匹配的过渡系数以及所述目标动力轴的荷载,确定驱动防滑扭矩,并按照所述驱动防滑扭矩进行车辆防滑控制。上述方法在计算过程中结合了预估的道路摩擦系数,因此,通过这种方法计算出的驱动防滑扭矩,能够更加匹配当前的道路情况,防滑控制更加合理;并且,由于是在预测到车轮具有打滑趋势的情况下进行的车辆防滑控制,因此,相比较车轮打滑时再进行防滑控制,避免了突然间降扭带来的驾驶顿挫感,提升驾驶体验。
57、为使本公开的上述目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附附图,作详细说明如下。
- 还没有人留言评论。精彩留言会获得点赞!