巡航速度的确定方法、装置、车载设备和计算机存储介质与流程
本发明涉及车辆的巡航速度的确定技术,尤其涉及一种巡航速度的确定方法、装置、车载设备和计算机存储介质。
背景技术:
1、目前,伴随着汽车智能驾驶系统的发展和推广,特别是低阶巡航辅助类功能,例如,自适应巡航等基本达到标准配置的情况。自适应巡航控制(adaptive cruise control,acc)功能可以根据驾驶员设置的车速进行巡航控制,目前,提供给驾驶员调节设置巡航速度为按压式按键或者滚动按键,每操作一次巡航车速变化固定值。
2、然而,现有的确定车辆的巡航速度的方法效率低下。
技术实现思路
1、本发明实施例提供一种巡航速度的确定方法、装置、车载设备和计算机存储介质,能够提高巡航速度的确定效率。
2、本发明的技术方案是这样实现的:
3、本发明实施例提供一种巡航速度的确定方法,包括:
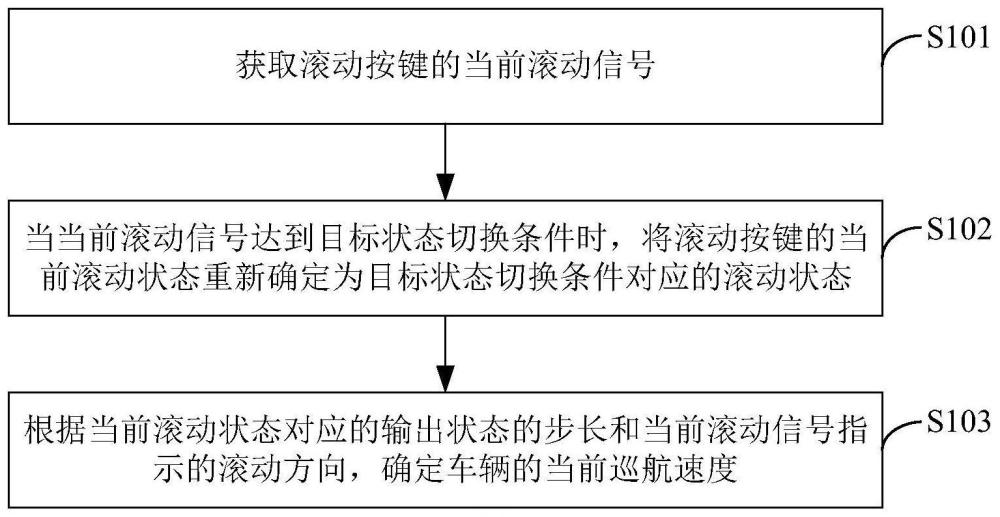
4、获取滚动按键的当前滚动信号;
5、当所述当前滚动信号达到目标状态切换条件时,将所述滚动按键的当前滚动状态重新确定为所述目标状态切换条件对应的滚动状态;其中,所述目标状态切换条件为所述当前滚动状态对应的状态切换条件;
6、根据所述当前滚动状态对应的输出状态的步长和所述当前滚动信号指示的滚动方向,确定车辆的当前巡航速度。
7、如此,利用目标状态切换条件可以确定出准确的当前滚动状态,有利于提高巡航速度的确定效率,针对不同的当前滚动状态确定不同的当前巡航速度,提高了巡航速度的确定效率。
8、进一步,所述滚动状态包括:第一滚动状态、第二滚动状态和第二滚动的判断状态;其中,所述第一滚动状态对应的步长小于所述第二滚动状态对应的步长。
9、如此,将上述滚动状态分为第一滚动状态、第二滚动状态和第二滚动的判断状态三种滚动状态,对滚动按键的状态进行了更加细致的划分,有利于准确地确定出滚动按键的当前滚动状态,进而有利于准确地确定出巡航速度。
10、进一步,所述当所述当前滚动信号达到目标状态切换条件时,将所述滚动按键的当前滚动状态重新确定为所述目标状态切换条件对应的滚动状态,包括:
11、当所述当前滚动状态为所述第一滚动状态时,将所述当前滚动状态重新确定为所述第二滚动的判断状态。
12、如此,在当前滚动状态为慢滚状态时若接收到滚动信号,就将当前滚动状态重新确定为快滚判断状态,以在下一次接收到滚动信号之后确定将当前滚动状态是确定为慢滚状态还是快滚状态,有利于为滚动按键确定出准确的滚动状态。
13、进一步,所述当所述当前滚动信号达到目标状态切换条件时,将所述滚动按键的当前滚动状态重新确定为所述目标状态切换条件对应的滚动状态,包括:
14、当所述当前滚动状态为所述第二滚动判断状态,根据预设时长内获取到的滚动信号的数目,对所述当前滚动状态进行重新确定;
15、其中,所述预设时长的起始时间为所述滚动按键的当前滚动状态确定为所述第二滚动的判断状态的时刻。
16、如此,通过预设时长内获取到的滚动信号的数目可以知晓滚动按键的滚动频次,从而确定出用户对巡航速度改变的幅度大小的意向,进而基于该数目来准确地确定出处于第二滚动的判断状态的滚动按键的下一滚动状态。
17、进一步,所述当所述当前滚动状态为所述第二滚动的判断状态,根据预设时长内获取到的滚动信号的数目,对所述当前滚动状态进行重新确定,包括:
18、当所述当前滚动状态为所述第二滚动的判断状态,且预设时长内获取到的滚动信号的数目小于预设阈值时,将所述当前滚动状态重新确定为所述第一滚动状态;
19、当所述当前滚动状态为所述第二滚动的判断状态,且预设时长内获取到的滚动信号的数目大于等于预设阈值时,将所述当前滚动状态重新确定为所述第二滚动状态。
20、如此,当滚动按键处于第二滚动的判断状态时,通过判断预设时长内获取到的滚动信号的数目来重新确定当前滚动状态是第一滚动状态还是第二滚动状态,从而可以依据用户的意向来确定出滚动按键的当前滚动状态,提高了滚动按键的当前滚动状态进行确定的准确。
21、进一步,所述当所述当前滚动信号达到目标状态切换条件时,将所述滚动按键的当前滚动状态重新确定为所述目标状态切换条件对应的滚动状态,包括:
22、当所述当前滚动状态为所述第二滚动的判断状态,根据所述当前滚动信号与上一滚动信号之间的关系,对所述当前滚动状态进行重新确定。
23、如此,可以基于当前滚动信号与上一滚动信号之间的关系来知晓滚动按键在相邻两次滚动中存在的差异和不同,从而确定出用户对巡航速度的改变幅度大小的意向,进而基于该数目来准确地确定出处于第二滚动的判断状态的滚动按键的下一滚动状态。
24、进一步,所述当所述当前滚动状态为所述第二滚动的判断状态,根据所述当前滚动信号与上一滚动信号之间的关系,对所述当前滚动状态进行重新确定,包括:
25、当所述当前滚动状态为所述第二滚动的判断状态,且所述当前滚动信号指向的滚动方向与上一滚动信号指向的方向不同时,将所述当前滚动状态重新确定为所述第一滚动状态;
26、当所述当前滚动状态为所述第二滚动的判断状态,且所述当前滚动信号与上一滚动信号的时间间隔大于预设时间阈值时,将所述当前滚动状态重新确定为所述第一滚动状态。
27、如此,当滚动按键处于第二滚动的判断状态时,通过判断当前滚动信号与上一滚动信号的滚动方向和时间间隔来重新确定当前滚动状态是否为第一滚动状态或者维持不变,从而可以依据用户的意向来确定出滚动按键的当前滚动状态,提高了滚动按键的当前滚动状态进行确定的准确性。
28、进一步,所述当所述当前滚动信号达到目标状态切换条件时,将所述滚动按键的当前滚动状态重新确定为所述目标状态切换条件对应的滚动状态,包括:
29、当所述当前滚动状态为所述第二滚动状态,根据所述当前滚动信号与上一滚动信号之间的关系,对所述当前滚动状态进行重新确定。
30、如此,可以基于当前滚动信号与上一滚动信号之间的关系来知晓滚动按键在相邻两次滚动中存在的差异和不同,从而确定出用户对巡航速度的改变幅度大小的意向,进而基于该关系来准确地确定出处于第二滚动状态的滚动按键的下一滚动状态。
31、进一步,所述当所述当前滚动状态为所述第二滚动状态,根据所述当前滚动信号与上一滚动信号之间的关系,对所述当前滚动状态重新确定,包括:
32、当所述当前滚动状态为所述第二滚动状态,且所述当前滚动信号指向的滚动方向与上一滚动信号指向的方向不同时,将所述当前滚动状态重新确定为所述第一滚动状态;
33、当所述当前滚动状态为所述第二滚动状态,且所述当前滚动信号与上一滚动信号的时间间隔大于预设时间阈值时,将所述当前滚动状态重新确定为所述第一滚动状态。
34、如此,当滚动按键处于第二滚动状态时,通过判断当前滚动信号与上一滚动信号的滚动方向和时间间隔来重新确定当前滚动状态是否为第一滚动状态或者维持不变,从而可以依据用户的意向来确定出滚动按键的当前滚动状态,提高了滚动按键的当前滚动状态进行确定的准确性。
35、进一步,所述方法还包括:
36、当所述当前滚动状态为所述第二滚动状态,且接收到复位信号或者上电信号时,将所述当前滚动状态重新确定为所述第一滚动状态。
37、如此,在复位和上电之后,用户此时改变巡航速度的幅度的意向较小,将当前滚动状态重新确定为第一滚动状态,如此,保持了巡航速度的平稳。
38、进一步,所述根据所述当前滚动状态对应的输出状态的步长和所述当前滚动信号指示的滚动方向,确定车辆的当前巡航速度,包括:
39、当所述当前滚动状态为所述第一滚动状态时,确定所述输出状态为所述第一滚动状态;
40、当所述当前滚动状态为所述第二滚动状态时,确定所述输出状态为所述第二滚动状态;
41、当所述当前滚动状态为所述第二滚动的判断状态时,确定所述输出状态为所述第二滚动状态;
42、根据所述输出状态的步长和所述当前滚动信号指示的滚动方向,确定所述当前巡航速度。
43、如此,由于第一滚动状态的步长小于第二滚动状态的步长,那么,输出状态的不同,对巡航速度的增大或者减小的幅度是不同的,在确定出准确的当前滚动状态基础上,能够提高巡航速度的确定效率。
44、进一步,所述根据所述输出状态的步长和所述当前滚动信号指示的滚动方向,确定所述当前巡航速度,包括:
45、当所述当前滚动信号指示的滚动方向为第一方向,且所述当前巡航速度不是所述输出状态的步长的整数倍时,将所述输出状态的步长的整数倍中大于所述当前巡航速度且与所述当前巡航速度的差值的绝对值中的最小值,确定为所述当前巡航速度;
46、当所述当前滚动信号指示的滚动方向为第一方向,且所述当前巡航速度是所述输出状态的步长的整数倍时,将所述当前巡航速度与所述输出状态的步长的和,确定所述当前巡航速度;
47、当所述当前巡航速度达到预设的上限值时,保持不变。
48、如此,通过当前滚动信号指示的滚动方向为第一方向来按照输出状态的步长来增大巡航速度,若为第一滚动状态就小幅度增大巡航速度,若为第二滚动状态就大幅度增大巡航速度,按照当前滚动信号的滚动方向和当前滚动状态能够准确地确定出巡航速度。
49、进一步地,所述根据所述输出状态的步长和所述当前滚动信号指示的滚动方向,确定所述当前巡航速度,包括:
50、当所述当前滚动信号指示的滚动方向为第二方向,且所述当前巡航速度不是所述输出状态的步长的整数倍时,将所述输出状态的步长的整数倍中小于所述当前巡航速度且与所述当前巡航速度的差值的绝对值中的最小值,确定为所述当前巡航速度;
51、当所述当前滚动信号指示的滚动方向为第二方向,且所述当前巡航速度是所述输出状态的步长的整数倍时,将所述当前巡航速度与所述输出状态的步长的差,确定所述当前巡航速度;
52、当所述当前巡航速度达到预设的下限值时,保持不变。
53、如此,通过当前滚动信号指示的滚动方向为第二方向来按照输出状态的步长来减小巡航速度,若为第一滚动状态就大幅度减小巡航速度,若为第二滚动状态就小幅度减小巡航速度,按照当前滚动信号的滚动方向和当前滚动状态能够准确地确定出巡航速度。
54、本发明实施例提供一种巡航速度的确定装置,包括:
55、获取模块,用于获取滚动按键的当前滚动信号;
56、第一确定模块,用于当所述当前滚动信号达到目标状态切换条件时,将所述滚动按键的当前滚动状态重新确定为所述目标状态切换条件对应的滚动状态;其中,所述目标状态切换条件为所述当前滚动状态对应的状态切换条件;
57、第二确定模块,用于根据所述当前滚动状态对应的输出滚动状态的步长和所述当前滚动信号指示的滚动方向,确定车辆的当前巡航速度。
58、如此,利用目标状态切换条件可以确定出准确的当前滚动状态,有利于提高巡航速度的确定效率,针对不同的当前滚动状态确定不同的当前巡航速度,提高了巡航速度的确定效率。
59、本发明实施例提供一种车载设备,包括:处理器以及存储有所述处理器可执行指令的存储介质,所述存储介质通过通信总线依赖所述处理器执行操作,当所述指令被所述处理器执行时,执行上述一个或多个实施例所述的巡航速度的确定方法。
60、本发明实施例提供一种计算机存储介质,存储有可执行指令,当所述可执行指令被处理器执行时,所述处理器执行如一个或多个实施例所述的巡航速度的确定方法。
61、本发明实施例提供一种计算机程序产品,包括计算机程序或指令,所述计算机程序或指令被处理器执行时,实现上述一个或多个实施例所述的巡航速度的确定方法的步骤。
62、本发明的有益效果:
63、(1)通过在获取到当前滚动信号后判断当前滚动信号是否达到目标状态切换条件,只有为是时,对当前滚动状态进行重新确定,进而确定当前巡航速度,如此,利用目标状态切换条件可以确定出准确的当前滚动状态,有利于提高巡航速度的确定效率;
64、(2)通过在重新确定出当前滚动状态之后,利用当前滚动状态对应的输出状态的步长和当前滚动信号指示的滚动方向来确定当前巡航速度,如此,针对不同的当前滚动状态确定不同的当前巡航速度,提高了巡航速度的确定效率。
- 还没有人留言评论。精彩留言会获得点赞!