一种公铁两运车的编组连接方法及公铁两运车与流程
本发明涉及轨道交通装备,尤其是涉及一种公铁两运车的编组连接方法及公铁两运车。
背景技术:
1、公铁两运车可以结合公路运输和铁路运输的优势,提升货物运输效率,降低运输成本,成为物流运输的研究热点。
2、相关技术中,公铁两运车进行列车编组连接的方法一般是:汽车头牵引半挂车来到带铁轨的水平路面上,汽车开上铁轨后卸掉半挂车,半挂车再与专用转向架连接,即可实现铁路列车编组,半挂车与集装箱货物即可在火车头的牵引下成为一组货运列车。
3、在这个过程中,由于前后两节半挂车的载货重量不同,导致两者的高度不一致,编组时需要多名工作人员不断的调整校正位置,才能有效的对接上。这个过程耗费较多的时间和人力,制约了公铁两运车运输效率的提升。
技术实现思路
1、针对上述技术问题和缺陷,本发明的目的是提供一种公铁两运车的编组连接方法及公铁两运车,可以提升公铁两运车的编组效率和可靠性,进而提高公铁两运车的运输效率。
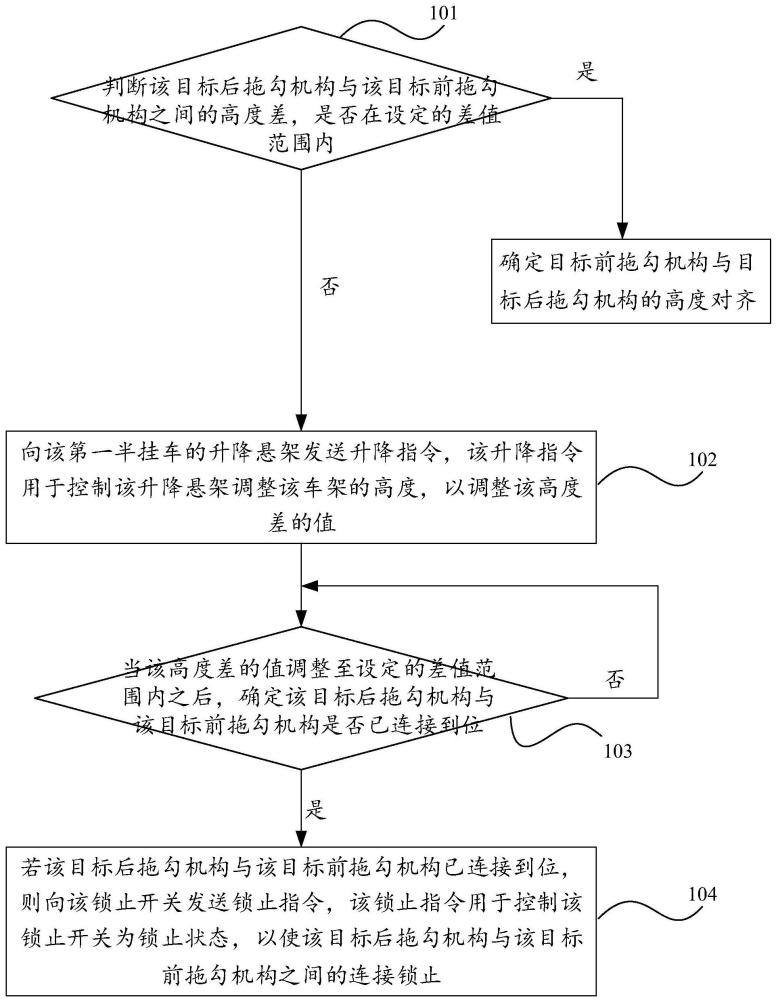
2、为实现上述目的,第一方面,本发明提供一种公铁两运车的编组连接方法,应用于公铁两运车的控制单元,该公铁两运车还包括多节半挂车和多个转向架,该半挂车包括车架、前拖勾机构、后拖勾机构、升降悬架及锁止开关,该前拖勾机构设置在该车架的前部,该后拖勾机构设置在该车架的后部,该转向架和该升降悬架分别与该车架相连,该锁止开关设置在该前拖勾机构或该后拖勾机构上;当两节该半挂车准备连接时,位于前面的该半挂车为第一半挂车,位于后面的该半挂车为第二半挂车,该第一半挂车的后拖勾机构为目标后拖勾机构,该第二半挂车的前拖勾机构为目标前拖勾机构,该控制单元设置在该第一半挂车上;该方法包括:判断该目标后拖勾机构与该目标前拖勾机构之间的高度差,是否在设定的差值范围内;若否,则向该第一半挂车的升降悬架发送升降指令,该升降指令用于控制该升降悬架调整该车架的高度,以调整该高度差的值;当该高度差的值调整至设定的差值范围内之后,确定该目标后拖勾机构与该目标前拖勾机构是否已连接到位;若是,则向该锁止开关发送锁止指令,该锁止指令用于控制该锁止开关为锁止状态,以使该目标后拖勾机构与该目标前拖勾机构之间的连接锁止。
3、采用上述实施例,通过控制单元判断两节半挂车之间的高度差是否在设定差值范围内,如果不在范围内,控制单元会发送升降指令,调整车架的高度,以使高度差值在设定范围内,确保了前后半挂车在高度上的一致性,为后续的连接操作提供了稳定的基础。在高度差调整至设定范围内后,检查后拖勾机构和前拖勾机构是否已连接到位,如果已连接,控制单元会发送锁止指令,使锁止开关处于锁止状态,进一步加固两车之间的连接,这种锁止机制确保了连接的稳定性和可靠性,防止在运输过程中出现意外分离。利用控制单元实现了高度的自动调整和连接的智能锁止,控制单元作为整个编组连接的核心,可以根据预设的算法和程序自动完成一系列操作,减少了人为干预的需要,提高了编组连接的效率和准确性。本发明方法能够实现公铁两运车的快速、准确编组连接,提高了运输效率,具有广泛的应用前景。
4、在一些实施例中,该目标后拖勾机构上设置有第一高度传感器,该目标前拖勾机构上设置有第二高度传感器;在该判断该目标后拖勾机构与该目标前拖勾机构之间的高度差,是否在设定的差值范围内的步骤之前,还包括:获取由该第一高度传感器采集的该目标后拖勾机构的第一高度,及由该第二高度传感器采集的该目标前拖勾机构的第二高度;根据该第一高度和该第二高度,确定该目标后拖勾机构与该目标前拖勾机构之间的高度差。
5、采用上述实施例,通过在目标后拖勾机构和目标前拖勾机构上设置高度传感器,精确测量两个机构的高度,并根据这些高度数据计算出它们之间的高度差。这种方法不仅简化了高度差的判断过程,提高了编组连接的效率,而且通过实时的数据采集和计算,确保了高度差的精确性和可靠性。在调整高度差的过程中,控制单元通过发送升降指令,精确控制升降悬架的高度调整,使高度差值达到设定的范围内。这种高度差调整的精确控制提高了编组连接的安全性和稳定性。
6、在一些实施例中,该目标后拖勾机构上设置有位置信号收发器,该目标前拖勾机构上设置有位置信号反射器;该判断该目标后拖勾机构与该目标前拖勾机构之间的高度差,是否在设定的差值范围内的步骤,包括:向该位置信号收发器发送第一信号发射指令,该第一信号发射指令用于控制该位置信号收发器,向该位置信号反射器发射第一位置检测信号;若接收到该位置信号收发器反馈的第一检查结果信号,则确定该目标后拖勾机构与该目标前拖勾机构之间的高度差在设定的差值范围内,该第一检查结果信号是由该位置信号收发器,在接收到该位置信号反射器反射回来的该第一位置检测信号后生成的;若未接收到该第一检查结果信号,则确定该高度差超出该差值范围。
7、采用上述实施例,通过在目标后拖勾机构和目标前拖勾机构上设置位置信号收发器和位置信号反射器,实现了高度差的非接触式检测。这种方法简化了高度差的判断过程,提高了编组连接的效率和可靠性。通过向位置信号收发器发送第一信号发射指令,控制该收发器向位置信号反射器发射第一位置检测信号,然后根据收发器反馈的第一检查结果信号,判断高度差是否在设定的差值范围内。这种方法避免了直接测量和计算高度差的需要,降低了误差和不确定性。同时,该方法还可以及时发现高度差超出设定范围的情况,提高了编组连接的安全性和稳定性。这种非接触式的高度差检测技术为物流运输和其他相关领域提供了重要的技术支持。
8、在一些实施例中,该目标后拖勾机构上设置有位置信号发射器,该目标前拖勾机构上设置有位置信号接收器;该判断该目标后拖勾机构与该目标前拖勾机构之间的高度差,是否在设定的差值范围内的步骤,包括:向该位置信号发射器发送第二信号发射指令,该第二信号发射指令用于控制该位置信号发射器,向该位置信号接收器发射位第二位置检测信号;若接收到该位置信号接收器反馈的第二检查结果信号,则确定该目标后拖勾机构与该目标前拖勾机构之间的高度差在设定的差值范围内,该第二检查结果信号是由该位置信号接收器在接收到该第二位置检测信号后生成的;若未接收到该第二检查结果信号,则确定该高度差超出该差值范围。
9、采用上述实施例,通过在目标后拖勾机构和目标前拖勾机构上设置位置信号发射器和位置信号接收器,实现了高度差的非接触式检测。这种方法简化了高度差的判断过程,提高了编组连接的效率和可靠性。通过向位置信号发射器发送第二信号发射指令,控制该发射器向位置信号接收器发射第二位置检测信号,然后根据接收器反馈的第二检查结果信号,判断高度差是否在设定的差值范围内。这种方法避免了直接测量和计算高度差的需要,降低了误差和不确定性。同时,该方法还可以及时发现高度差超出设定范围的情况,提高了编组连接的安全性和稳定性。这种非接触式的高度差检测技术为物流运输和其他相关领域提供了重要的技术支持。
10、在一些实施例中,该目标后拖勾机构上还设置有距离传感器,在该判断该目标后拖勾机构与该目标前拖勾机构之间的高度差,是否在设定的差值范围内的步骤之前,还包括:获取由该距离传感器所采集的对接间距,该对接间距为该目标后拖勾机构与该目标前拖勾机构之间相隔的距离;当该对接间距小于或等于设定的间距阈值时,开始获取该目标后拖勾机构与该目标前拖勾机构之间的高度差。
11、采用上述实施例,通过在目标后拖勾机构上设置距离传感器,精确测量目标后拖勾机构与目标前拖勾机构之间的对接间距。这种方法确保了在判断高度差之前,两个机构之间的距离在合适范围内。避免间距过大,导致高度检测出现较大误差。只有对接间距小于或等于设定的间距阈值时,才开始检测高度差,以确保高度差检测的准确性。
12、在一些实施例中,该目标前拖勾机构形成有凸体,该目标后拖勾机构形成有凹槽,该凹槽上设置有位置传感器,该凸体上设置有位置标记,当该凸体插入至该凹槽中到指定位置时,该位置传感器与该位置标记在该位置传感器的信号发射方向上相对;该确定该目标后拖勾机构与该目标前拖勾机构的是否已连接到位的步骤,包括:在该位置传感器发射位置探测信号后,若接收到该位置传感器反馈的位置到达信号,则确定该目标后拖勾机构与该目标前拖勾机构已连接到位,该位置到达信号是由该位置传感器在接收到该位置标记反射回来的该位置探测信号后生成的。
13、采用上述实施例,通过在目标前拖勾机构上设置凸体,目标后拖勾机构上设置凹槽,实现了快速、准确的连接定位。凸体和凹槽的设计使得连接过程更加稳定,减少了连接误差。同时,在凹槽上设置的位置传感器和在凸体上设置的位置标记,进一步提高了连接的精确性。当凸体插入凹槽到指定位置时,位置传感器与位置标记在传感器的信号发射方向上相对,从而检测到连接到位的状态。这种方法避免了传统连接方式中需要手动调整和检测的问题,提高了连接效率和安全性。
14、在一些实施例中,该升降悬架包括空气弹簧和气压传感器,该气压传感器设置在该空气弹簧的内部;在该向该第一半挂车的升降悬架发送升降指令的步骤之前,还包括:获取该气压传感器采集倒的气压检测值;根据该气压检测值、该第一半挂车的当前高度和该差值范围,确定气压变化量;根据该气压变化量生成用于控制该空气弹簧充气或放气的升降指令。
15、采用上述实施例,通过在升降悬架中设置气压传感器,实现了对气囊压力的实时监测和控制。气压传感器设置在空气弹簧的内部,能够准确测量气囊内的气压。根据气压检测值、半挂车的当前高度和设定的差值范围,控制单元可以精确计算出气压变化量,并根据该变化量生成升降指令。升降指令用于控制空气弹簧的充气或放气,进而调整半挂车的高度。这种方法避免了因气囊压力变化而导致的编组连接问题,提高了编组连接的稳定性和可靠性。同时,实时监测气囊压力也有助于及时发现潜在的安全隐患,提高了运输过程的安全性。这种气压控制技术为物流运输和其他相关领域提供了更加高效和可靠的编组连接方法。
16、第二方面,本发明提供一种公铁两运车,包括控制单元、多节半挂车和多个转向架,该半挂车包括车架、前拖勾机构、后拖勾机构、升降悬架及锁止开关,该前拖勾机构设置在该车架的前部,该后拖勾机构设置在该车架的后部,该转向架和该升降悬架分别与该车架相连,该锁止开关设置在该前拖勾机构或该后拖勾机构上;当两节该半挂车准备连接时,位于前面的该半挂车为第一半挂车,位于后面的该半挂车为第二半挂车,该第一半挂车的后拖勾机构为目标后拖勾机构,该第二半挂车的前拖勾机构为目标前拖勾机构,该控制单元设置在该第一半挂车上;该控制单元包括高度判断模块、第一发送模块、连接确定模块及第二发送模块;高度判断模块用于判断该目标后拖勾机构与该目标前拖勾机构之间的高度差,是否在设定的差值范围内;第一发送模块用于当该高度差超出该差值范围时,向该第一半挂车的升降悬架发送升降指令,该升降指令用于控制该升降悬架调整该车架的高度,以调整该高度差的值;连接确定模块用于当该高度差的值调整至设定的差值范围内之后,确定该目标后拖勾机构与该目标前拖勾机构的是否已连接到位;第二发送模块用于当该目标后拖勾机构与该目标前拖勾机构已连接到位时,则向该锁止开关发送锁止指令,该锁止指令用于控制该锁止开关为锁止状态,以使该目标后拖勾机构与该目标前拖勾机构之间的连接锁止。
17、本发明实施例的公铁两运车可以实现上述方法的技术效果,此处不在赘述。
18、第三方面,本发明提供一种公铁两运车的控制单元,包括处理器和存储器,存储器上存储有计算机程序,计算机程序被处理器执行时,实现上述的方法。
19、本发明实施例的控制单元可以实现上述方法的技术效果,此处不在赘述。
20、第四方面,本发明提供一种计算机可读的存储介质,其上存储有计算机程序,计算机程序被处理器执行时,实现上述的方法。
21、本发明实施例的存储介质可以实现上述方法的技术效果,此处不在赘述。
22、本发明实施例中提供的一个或多个技术方案,至少具有如下技术效果或优点:
23、1.精确的高度调整:通过控制单元判断两节半挂车之间的高度差是否在设定差值范围内。如果不在范围内,控制单元会发送升降指令,调整车架的高度,以使高度差值在设定范围内。这一步骤确保了前后半挂车在高度上的一致性,为后续的连接操作提供了稳定的基础。
24、2.可靠的连接与锁止:在高度差调整至设定范围内后,该方法会检查后拖勾机构和前拖勾机构是否已连接到位。如果已连接,控制单元会发送锁止指令,使锁止开关处于锁止状态,进一步加固两车之间的连接。这种锁止机制确保了连接的稳定性和可靠性,防止在运输过程中出现意外分离。
25、3.自动化与智能化:利用控制单元实现了高度的自动调整和连接的智能锁止。控制单元作为整个编组连接的核心,可以根据预设的算法和程序自动完成一系列操作,减少了人为干预的需要,提高了编组连接的效率和准确性。
- 还没有人留言评论。精彩留言会获得点赞!