车辆后轮转角控制方法、装置、电子设备及存储介质与流程
本申请涉及车辆后轮转向,具体涉及一种车辆后轮转角控制方法、装置、电子设备及存储介质。
背景技术:
1、后轮转向通过线控转向完成,相关部件会根据车辆的转向过程中的前轮转向控制信息以及车辆的相关状态,计算出后轮的转向方向以及角度等信息,并进一步基于这些信息对车辆后轮进行转向控制。
2、现有技术中,后轮的转角一般通过前馈控制和反馈控制共同决定,此时前馈控制器会通过相关信息计算出一个前馈转角比,反馈控制器会计算出一个反馈转角比。而后,分别赋予前馈转角比与反馈转角比固定的权重(一般是0.5与0.5),以计算出转角比。但基于此方式获取的转角比,无法满足车辆在不同工况下的不同需求。
技术实现思路
1、鉴于上述问题,本申请提供了一种车辆后轮转角控制方法、装置、电子设备及存储介质,能够根据当前车速值与前轮转角值确定出前馈权重与反馈权重,进而确定出目标转角比,符合车辆在不同工况下的具体转向需求。
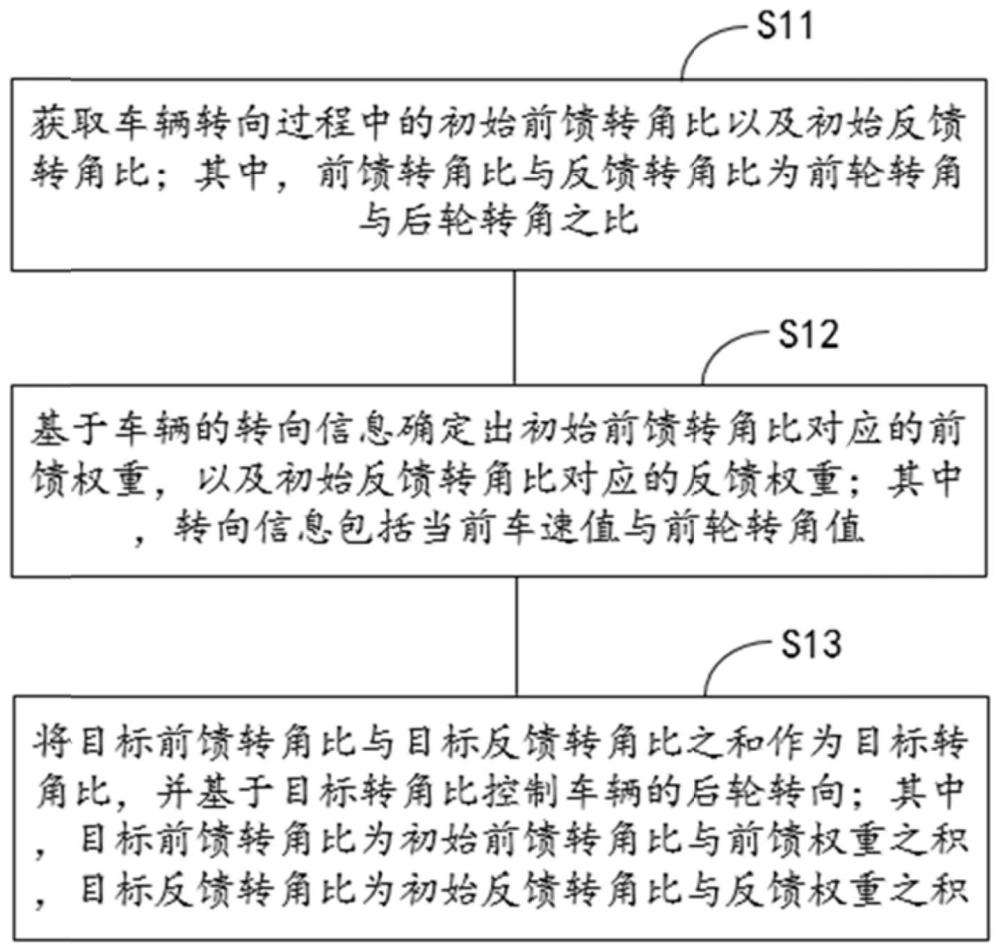
2、本申请第一方面提供一种车辆后轮转角控制方法,包括:获取车辆转向过程中的初始前馈转角比以及初始反馈转角比;其中,前馈转角比与反馈转角比为前轮转角与后轮转角之比;基于车辆的转向信息确定出初始前馈转角比对应的前馈权重,以及初始反馈转角比对应的反馈权重;其中,转向信息包括当前车速值与前轮转角值;将目标前馈转角比与目标反馈转角比之和作为目标转角比,并基于目标转角比控制车辆的后轮转向;其中,目标前馈转角比为初始前馈转角比与前馈权重之积,目标反馈转角比为初始反馈转角比与反馈权重之积。
3、在一些具体实施例中,基于车辆的转向信息确定出初始前馈转角比对应的前馈权重,以及初始反馈转角比对应的反馈权重的步骤,包括:确定出当前车速值所处的预设车速区间,以及前轮转角值所处的预设转角值区间;其中,车速值被划分为多个预设车速区间,前轮转角值被划分为多个预设转角值区间;基于预设车速区间与预设转角值区间构成的第一区间组,确定出初始前馈转角比对应的前馈权重以及初始反馈转角比对应的反馈权重;其中,不同第一区间组中,预设车速区间和/或预设转角值区间不同,不同第一区间组与不同大小的前馈权重对应。
4、在一些具体实施例中,转向信息还包括道路附着系数,方法还包括:确定出道路附着系数所在的预设附着系数区间;其中,道路附着系数被划分为多个预设附着系数区间;基于第一区间组以及预设附着系数区间构成的第二区间组,确定出初始前馈转角比对应的前馈权重以及初始反馈转角比对应的反馈权重;其中,不同第二区间组中,预设车速区间、预设转角值区间以及预设附着系数区间中的至少一者不同,不同第二区间组与不同大小的前馈权重对应。
5、在一些具体实施例中,不同第一区间组之间仅存在预设车速区间不同时,第一区间组中的预设车速区间的车速均值越大,第一区间组对应的前馈权重越小;不同第一区间组之间仅存在预设转角值区间不同时,第一区间组中的预设转角值区间的转角值均值越大,第一区间组对应的前馈权重越大。
6、在一些具体实施例中,不同第二区间组之间仅存在预设附着系数区间不同时,第二区间组中的预设附着系数区间的附着系数的均值越大,第二区间组对应的前馈权重越小。
7、在一些具体实施例中,第一区间组中的预设车速区间的最大车速值小于第一预设车速值时,第一区间组对应的前馈权重大于第一预设权重;第一区间组中的预设车速区间的最小车速值大于第二预设车速值时,第一区间组对应的前馈权重小于第二预设权重且大于第三预设权重;其中,第二预设车速值大于第一预设车速值。
8、在一些具体实施例中,在第一区间组中的预设车速区间的最大车速值小于第三预设车速值,且预设转角值区间中的最小转角值大于预设转角值时,第一区间组对应的前馈权重大于第四预设权重。
9、本申请第二方面提供一种车辆后轮转角控制装置,装置包括:获取模块,用于获取车辆转向过程中输出的初始前馈转角比以及初始反馈转角比;其中,前馈转角比与反馈转角比为前轮转角与后轮转角之比;处理模块,基于车辆的转向信息确定出初始前馈转角比对应的前馈权重,以及初始反馈转角比对应的反馈权重;其中,转向信息包括当前车速值与前轮转角值;控制模块,用于将目标前馈转角比与目标反馈转角比之和作为目标转角比,并基于目标转角比控制车辆的后轮转向;其中,目标前馈转角比为初始前馈转角比与前馈权重之积,目标反馈转角比为初始反馈转角比与反馈权重之积。
10、本申请第三方面提供一种电子设备,包括:处理器;存储器,用于存储计算机程序,计算机程序被处理器执行时上述任一项的控制方法。
11、本申请第四方面提供一种计算机可读存储介质,存储介质中存储有计算机程序,计算机程序被处理器执行时实现如上述任一项的控制方法。
12、本申请至少具备的有益技术效果:基于本申请提供的车辆后轮转角控制方法、装置、电子设备及存储介质,包括:获取车辆转向过程中的初始前馈转角比以及初始反馈转角比;其中,前馈转角比与反馈转角比为前轮转角与后轮转角之比;基于车辆的转向信息确定出初始前馈转角比对应的前馈权重,以及初始反馈转角比对应的反馈权重;其中,转向信息包括当前车速值与前轮转角值;将目标前馈转角比与目标反馈转角比之和作为目标转角比,并基于目标转角比控制车辆的后轮转向;其中,目标前馈转角比为初始前馈转角比与前馈权重之积,目标反馈转角比为初始反馈转角比与反馈权重之积。因此,能够根据当前车速值与前轮转角值确定出前馈权重与反馈权重,进而确定出目标转角比,符合车辆在不同工况下的具体转向需求。
13、上述说明仅是本申请实施例技术方案的概述,为了能够更清楚了解本申请实施例的技术手段,而可依照说明书的内容予以实施,并且为了让本申请实施例的上述和其它目的、特征和优点能够更明显易懂,以下特举本申请的具体实施方式。
技术特征:
1.一种车辆后轮转角控制方法,其特征在于,包括:
2.根据权利要求1所述的控制方法,其特征在于,
3.根据权利要求2所述的控制方法,其特征在于,
4.根据权利要求2所述的控制方法,其特征在于,
5.根据权利要求3所述的控制方法,其特征在于,
6.根据权利要求4所述的控制方法,其特征在于,
7.根据权利要求3所述的控制方法,其特征在于,
8.一种车辆后轮转角控制装置,其特征在于,所述装置包括:
9.一种电子设备,其特征在于,包括:
10.一种计算机可读存储介质,其特征在于,所述存储介质中存储有计算机程序,所述计算机程序被处理器执行时实现如权利要求1-7中任一项所述的控制方法。
技术总结
本申请公开一种车辆后轮转角控制方法、装置、电子设备及存储介质,方法包括:获取车辆转向过程中的初始前馈转角比以及初始反馈转角比;前馈转角比与反馈转角比为前轮转角与后轮转角之比;基于车辆的转向信息确定出初始前馈转角比对应的前馈权重,以及初始反馈转角比对应的反馈权重;转向信息包括当前车速值与前轮转角值;将目标前馈转角比与目标反馈转角比之和作为目标转角比,并基于目标转角比控制车辆的后轮转向;目标前馈转角比为初始前馈转角比与前馈权重之积,目标反馈转角比为初始反馈转角比与反馈权重之积。因此,能够根据当前车速值与前轮转角值确定出前馈权重与反馈权重,进而确定出目标转角比,符合车辆在不同工况下的具体转向需求。
技术研发人员:刘海,吕麟华,墙懿,王学黎
受保护的技术使用者:重庆赛力斯新能源汽车设计院有限公司
技术研发日:
技术公布日:2024/4/7
- 还没有人留言评论。精彩留言会获得点赞!