一种纯电动车的下坡辅助方法、装置、设备及存储介质与流程
本发明涉及电动汽车领域,特别涉及一种纯电动车的下坡辅助方法、装置、设备及存储介质。
背景技术:
1、纯电汽车在下坡路况时,司机需要主动通过对油门和刹车踏板的操控来维持车速的稳定,这一过程相较于在平坦路段上行驶更为复杂。特别是在坡道行驶中,司机必须更频繁地调整油门和刹车,需要更敏捷的反应速度,以确保车辆在陡峭的下坡路段上能够保持适当的速度。
2、在坡道行驶中,由于道路的不规则性和坡度的变化,驾驶员可能需要不断地施加油门以提供动力,或者使用刹车来控制车速,以避免过快的下坡速度。这种手动操作的频繁性和强度使得在长时间坡道运营中,驾驶员面临较高的驾驶负担,容易导致驾驶疲劳,同时在长下坡时对常规制动部件的磨损可能造成过热失效的问题。
3、有鉴于此,提出本申请。
技术实现思路
1、本发明公开了一种纯电动车的下坡辅助方法、装置、设备及存储介质,旨在解决在电动汽车进行长下坡时频繁的操作油门和刹车存在安全隐患的问题。
2、本发明第一实施例提供了一种纯电动车的下坡辅助方法,包括:
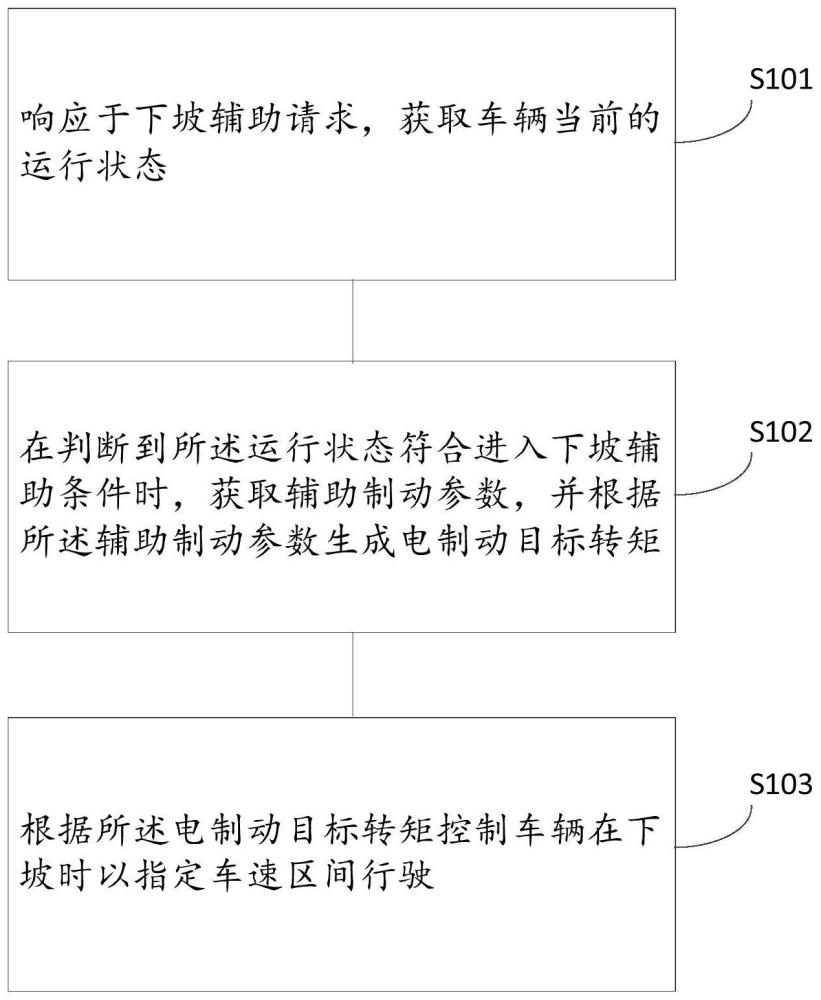
3、响应于下坡辅助请求,获取车辆当前的运行状态;
4、在判断到所述运行状态符合进入下坡辅助条件时,获取辅助制动参数,并根据所述辅助制动参数生成电制动目标转矩;
5、根据所述电制动目标转矩控制车辆在下坡时以指定车速区间行驶。
6、优选地,所述下坡辅助条件为:车辆处于d档行驶状态、车辆在预设车速区间内行驶、车辆无二级限功率故障和一级停车下高压故障、abs未启用、以及未踩制动踏板和加速踏板。
7、优选地,在所述根据所述电制动目标转矩控制车辆在下坡时以指定车速区间行驶之后,还包括:
8、实时监测车辆的运行状态,在判断到所述车辆的运行状态不符合下坡辅助条件时,退出下坡辅助。
9、优选地,所述电制动目标转矩的运算模型为:
10、tmp=f32_tmmaxebraketorq*(r_currspeed-f32r_daclimt)/f32r_dactzspan;
11、其中,tmp为电制动目标扭矩,f32_tmmaxebraketorq为电机最大制动扭矩,r_currspeed为电机当前转速,f32r_daclimt为下坡辅助需求限速值对应的电机转速,f32r_dactzspan为限速过渡区间对应的电机转速。
12、本发明第二实施例提供了一种纯电动车的下坡辅助装置,包括:
13、运行状态获取单元,用于响应于下坡辅助请求,获取车辆当前的运行状态;
14、电制动目标转矩生成单元,用于在判断到所述运行状态符合进入下坡辅助条件时,获取辅助制动参数,并根据所述辅助制动参数生成电制动目标转矩;
15、车速控制单元,用于根据所述电制动目标转矩控制车辆在下坡时以指定车速区间行驶。
16、优选地,所述下坡辅助条件为:车辆处于d档行驶状态、车辆在预设车速区间内行驶、车辆无二级限功率故障和一级停车下高压故障、abs未启用、以及未踩制动踏板和加速踏板。
17、优选地,所述车速控制单元还用于:
18、实时监测车辆的运行状态,在判断到所述车辆的运行状态不符合下坡辅助条件时,退出下坡辅助。
19、优选地,所述电制动目标转矩的运算模型为:
20、tmp=f32_tmmaxebraketorq*(r_currspeed-f32r_daclimt)/f32r_dactzspan;
21、其中,tmp为电制动目标扭矩,f32_tmmaxebraketorq为电机最大制动扭矩,r_currspeed为电机当前转速,f32r_daclimt为下坡辅助需求限速值对应的电机转速,f32r_dactzspan为限速过渡区间对应的电机转速。
22、本发明第二实施例提供了一种纯电动车的下坡辅助设备,包括存储器以及处理器,所述存储器内存储有计算机程序,所述计算机程序能够被所述处理器执行,以实现如上任意一项所述的一种纯电动车的下坡辅助方法。
23、本发明第四实施例提供了一种计算机可读存储介质,存储有计算机程序,所述计算机程序能够被所述计算机可读存储介质所在设备的处理器执行,以实现如上任意一项所述一种纯电动车的下坡辅助方法。
24、基于本发明提供的一种纯电动车的下坡辅助方法、装置、设备及存储介质,在接收到下坡辅助请求时,响应于下坡辅助请求,获取车辆当前的运行状态;接着,在判断到所述运行状态符合进入下坡辅助条件时,获取辅助制动参数,并根据所述辅助制动参数生成电制动目标转矩;最后,根据所述电制动目标转矩控制车辆在下坡时以指定车速区间行驶。解决了在电动汽车进行长下坡时频繁的操作油门和刹车存在安全隐患的问题。
技术特征:
1.一种纯电动车的下坡辅助方法,其特征在于,包括:
2.根据权利要求1所述的一种纯电动车的下坡辅助方法,其特征在于,所述下坡辅助条件为:车辆处于d档行驶状态、车辆在预设车速区间内行驶、车辆无二级限功率故障和一级停车下高压故障、abs未启用、以及未踩制动踏板和加速踏板。
3.根据权利要求1所述的一种纯电动车的下坡辅助方法,其特征在于,在所述根据所述电制动目标转矩控制车辆在下坡时以指定车速区间行驶之后,还包括:
4.根据权利要求1所述的一种纯电动车的下坡辅助方法,其特征在于,所述电制动目标转矩的运算模型为:
5.一种纯电动车的下坡辅助装置,其特征在于,包括:
6.根据权利要求5所述的一种纯电动车的下坡辅助装置,其特征在于,所述下坡辅助条件为:车辆处于d档行驶状态、车辆在预设车速区间内行驶、车辆无二级限功率故障和一级停车下高压故障、abs未启用、以及未踩制动踏板和加速踏板。
7.根据权利要求5所述的一种纯电动车的下坡辅助装置,其特征在于,所述车速控制单元还用于:
8.根据权利要求5所述的一种纯电动车的下坡辅助装置,其特征在于,所述电制动目标转矩的运算模型为:
9.一种纯电动车的下坡辅助设备,其特征在于,包括存储器以及处理器,所述存储器内存储有计算机程序,所述计算机程序能够被所述处理器执行,以实现如权利要求1至4任意一项所述的一种纯电动车的下坡辅助方法。
10.一种计算机可读存储介质,其特征在于,存储有计算机程序,所述计算机程序能够被所述计算机可读存储介质所在设备的处理器执行,以实现如权利要求1至4任意一项所述一种纯电动车的下坡辅助方法。
技术总结
本发明提供了一种纯电动车的下坡辅助方法、装置、设备及存储介质,在接收到下坡辅助请求时,响应于下坡辅助请求,获取车辆当前的运行状态;接着,在判断到所述运行状态符合进入下坡辅助条件时,获取辅助制动参数,并根据所述辅助制动参数生成电制动目标转矩;最后,根据所述电制动目标转矩控制车辆在下坡时以指定车速区间行驶。解决了在电动汽车进行长下坡时频繁的操作油门和刹车存在安全隐患的问题。
技术研发人员:赖志艺,尚小辉,林必生,王柏卫,尤双和,陆军,毛永佳,张建青,游运旺,兰发祥,彭禹博
受保护的技术使用者:厦门金龙旅行车有限公司
技术研发日:
技术公布日:2024/5/10
- 还没有人留言评论。精彩留言会获得点赞!