车辆速度的控制方法、装置、电子设备、车辆和存储介质与流程
本申请涉及自动驾驶,尤其涉及一种行驶速度的控制方法、装置、电子设备、车辆和存储介质。
背景技术:
1、目前越来越多的车辆具备自动跟车的功能,车辆能够根据前车速度自动加速或者减速,实现自动跟车的目的。但是,一旦跟车目标丢失,会导致跟车功能失效,在车辆转弯时车速过快或者过慢都容易引发交通事故。因此,如何在车辆转弯时对车辆的行驶速度进行控制,避免交通事故,成为本领域技术人员亟待解决的技术问题。
技术实现思路
1、有鉴于此,本申请提出一种车辆速度的控制方法、装置、电子设备、车辆和存储介质,该方法能够在车辆转弯时对车辆的行驶速度进行控制,进而避免交通事故。
2、本申请提出的技术方案具体如下:
3、第一方面,本申请的实施例提供一种车辆速度的控制方法,包括:
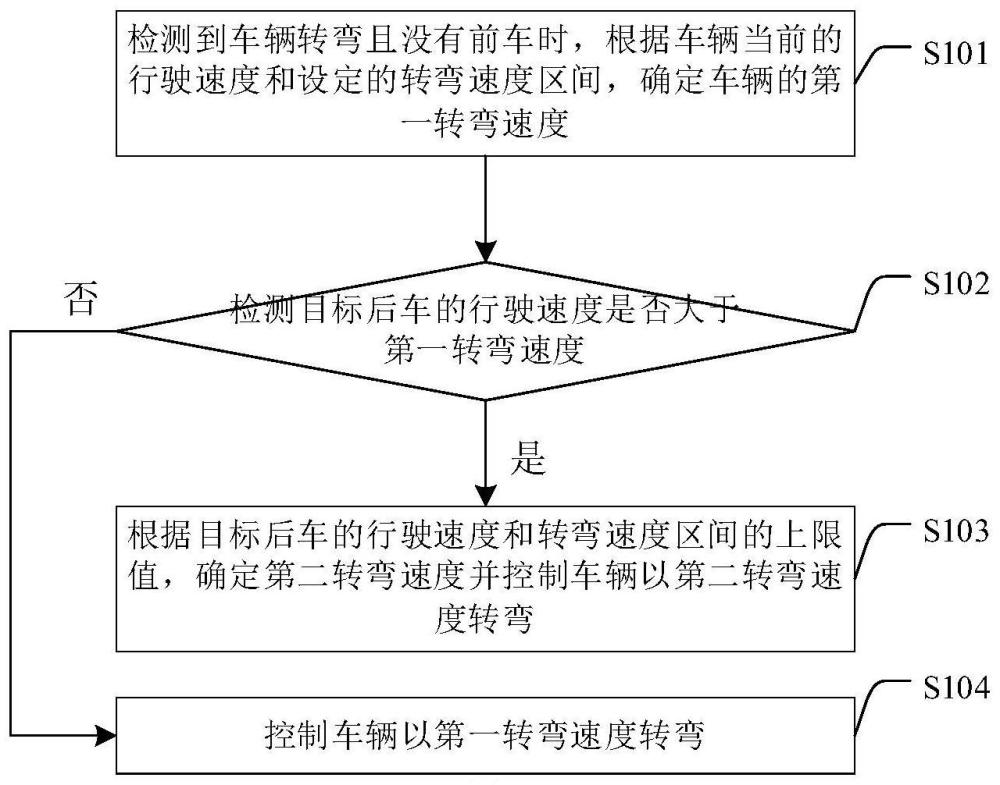
4、检测到车辆转弯且没有前车时,根据所述车辆当前的行驶速度和设定的转弯速度区间,确定所述车辆的第一转弯速度;
5、若检测到目标后车的行驶速度大于所述第一转弯速度,则根据所述目标后车的行驶速度和所述转弯速度区间的上限值,确定第二转弯速度并控制所述车辆以所述第二转弯速度转弯;若检测到目标后车的行驶速度小于或等于所述第一转弯速度,则控制所述车辆以所述第一转弯速度转弯;所述目标后车包括与所述车辆相邻的后车。
6、第二方面,本申请的实施例提供一种车辆速度的控制装置,包括:
7、检测模块,用于检测到车辆转弯且没有前车时,根据所述车辆当前的行驶速度和设定的转弯速度区间,确定所述车辆的第一转弯速度;
8、确定模块,用于若检测到目标后车的行驶速度大于所述第一转弯速度,则根据所述目标后车的行驶速度和所述转弯速度区间的上限值,确定第二转弯速度并控制所述车辆以所述第二转弯速度转弯;若检测到目标后车的行驶速度小于或等于所述第一转弯速度,则控制所述车辆以所述第一转弯速度转弯;所述目标后车包括与所述车辆相邻的后车。
9、进一步地,以上所述的装置中,还包括:
10、转弯检测模块,用于若检测到所述车辆的行驶速度小于设定行驶速度,并且所述车辆的方向盘转角大于设定方向盘转角,则确定检测到所述车辆转弯。
11、进一步地,以上所述的装置中,所述检测模块,具体用于:
12、若检测到所述车辆当前的行驶速度小于所述转弯速度区间的下限值,则确定所述转弯速度区间的下限值为所述第一转弯速度;若检测到所述车辆当前的行驶速度大于所述转弯速度区间的上限值,则确定所述转弯速度区间的上限值为所述第一转弯速度;若检测到所述车辆当前的行驶速度在所述转弯速度区间内,则确定所述车辆当前的行驶速度为所述第一转弯速度。
13、进一步地,以上所述的装置中,还包括:
14、后车检测模块,用于若检测到所述后车与所述车辆处于相同的转弯路径,且所述后车与所述车辆之间的距离小于设定距离,则确定所述后车为所述目标后车。
15、进一步的,以上所述的装置中,所述后车检测模块,具体用于:
16、若检测到所述后车与所述车辆的转向圆圆心之间的距离,与所述车辆的转弯半径之间的差值小于设定值,则确定所述后车与所述车辆处于相同的转弯路径。
17、进一步的,以上所述的装置中,所述后车检测模块,具体用于:
18、若检测到目标角度小于设定角度值,则表示所述后车与所述车辆之间的距离小于设定距离;所述目标角度为第一直线和第二直线之间的夹角,所述第一直线为所述车辆的转向圆圆心与所述车辆共同所在的直线,所述第二直线为所述车辆的转向圆圆心与所述后车共同所在的直线。
19、进一步地,以上所述的装置中,所述确定模块,具体用于:
20、若所述目标后车的行驶速度大于所述转弯速度区间的上限值,则确定所述转弯速度区间的上限值为所述第二转弯速度;若所述目标后车的行驶速度小于或等于所述转弯速度区间的上限值,则确定所述目标后车的行驶速度为所述第二转弯速度。
21、第三方面,本申请的实施例提供一种电子设备,包括:
22、存储器和处理器;其中,所述存储器用于存储程序;所述处理器,用于通过运行所述存储器中的程序,实现以上任意一项所述的方法。
23、第四方面,本申请的实施例提供一种车辆,包括速度控制单元,所述速度控制单元被配置为执行以上任意一项所述的方法。
24、第五方面,本申请的实施例提供一种存储介质,所述存储介质上存储有计算机程序,所述计算机程序被处理器执行时,实现以上任意一项所述的方法。
25、第六方面,本申请的实施例提供了一种计算机程序产品或计算机程序,所述计算机程序产品或所述计算机程序包括计算机指令,所述计算机指令存储在计算机可读存储介质中;计算机设备的处理器从所述计算机可读存储介质读取所述计算机指令,处理器执行所述计算机指令,使得所述计算机设备执行以上任意一项所述的方法。
26、本申请提出的车辆速度的控制方法,能够在检测到车辆转弯且没有前车时,根据车辆当前的行驶速度和设定的转弯速度区间,确定车辆的第一转弯速度。然后比对第一转弯速度和目标后车的行驶速度,如果检测到目标后车的行驶速度大于第一转弯速度,则根据目标后车的行驶速度和转弯速度区间的上限值,确定第二转弯速度并控制车辆以第二转弯速度转弯;如果检测到目标后车的行驶速度小于或等于第一转弯速度,则控制车辆以第一转弯速度转弯,其中目标后车包括与车辆相邻的后车。如此设置,车辆能够在转弯时保持在设定的转弯速度区间,使得转弯速度不至于过快造成车辆侧翻,同时能够根据目标后车的行驶速度对车辆的转弯速度进行调整,避免车辆行驶过慢引发追尾的情况,确保转弯时的行车安全。
技术特征:
1.一种车辆速度的控制方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,还包括:
3.根据权利要求1所述的方法,其特征在于,所述根据所述车辆当前的行驶速度和设定的转弯速度区间,确定所述车辆的第一转弯速度,包括:
4.根据权利要求1所述的方法,其特征在于,还包括:
5.根据权利要求4所述的方法,其特征在于,还包括:
6.根据权利要求4所述的方法,其特征在于,还包括:
7.根据权利要求1所述的方法,其特征在于,所述根据所述目标后车的行驶速度和所述转弯速度区间的上限值,确定第二转弯速度,包括:
8.一种车辆速度的控制装置,其特征在于,包括:
9.一种电子设备,其特征在于,包括:
10.一种车辆,其特征在于,包括速度控制单元,所述速度控制单元被配置为执行权利要求1至7中任意一项所述的方法。
11.一种存储介质,其特征在于,所述存储介质上存储有计算机程序,所述计算机程序被处理器执行时,实现如权利要求1至7中任意一项所述的方法。
技术总结
本申请提出一种车辆速度的控制方法、装置、电子设备、车辆和存储介质,该方法能够在检测到车辆转弯且没有前车时,根据车辆当前的行驶速度和转弯速度区间,确定第一转弯速度。然后比对第一转弯速度和目标后车的行驶速度,如果检测到目标后车的行驶速度大于第一转弯速度,则根据目标后车的行驶速度和转弯速度区间的上限值,确定第二转弯速度并控制车辆转弯;如果检测到目标后车的行驶速度小于或等于第一转弯速度,则控制车辆以第一转弯速度转弯。车辆能够在转弯时保持在设定的转弯速度区间,使得转弯速度不至于过快造成车辆侧翻,同时能够根据目标后车的行驶速度对车辆的转弯速度进行调整,避免车辆行驶过慢引发追尾的情况。
技术研发人员:李波,南男
受保护的技术使用者:北京集度科技有限公司
技术研发日:
技术公布日:2024/5/10
- 还没有人留言评论。精彩留言会获得点赞!