一种主动悬架预控制方法和系统与流程
本发明属于悬架控制,具体涉及一种主动悬架预控制方法和系统。
背景技术:
1、预瞄控制能够根据车载摄像头等图像采集设备识别出的路面信息对车辆相应执行机构进行预控制。采用预瞄控制的主动悬架系统能够提高车辆的乘坐舒适性,但是当车载摄像头等图像采集设备出现故障,包括硬件和软件故障,车辆无法准确获取路面信息,从而导致主动悬架部分功能失效或者降级,车辆的乘坐舒适性会大大降低。
2、现有技术是通过针对驾驶风格进行研究并结合了车联网数据进行主动控制,但此种方式前期所需要的样本数据量较大。
技术实现思路
1、为了能更便捷的对车辆的主动悬架系统进行调整,本发明提出一种主动悬架预控制方法和系统。
2、实现本发明目的之一的一种主动悬架预控制方法,包括:
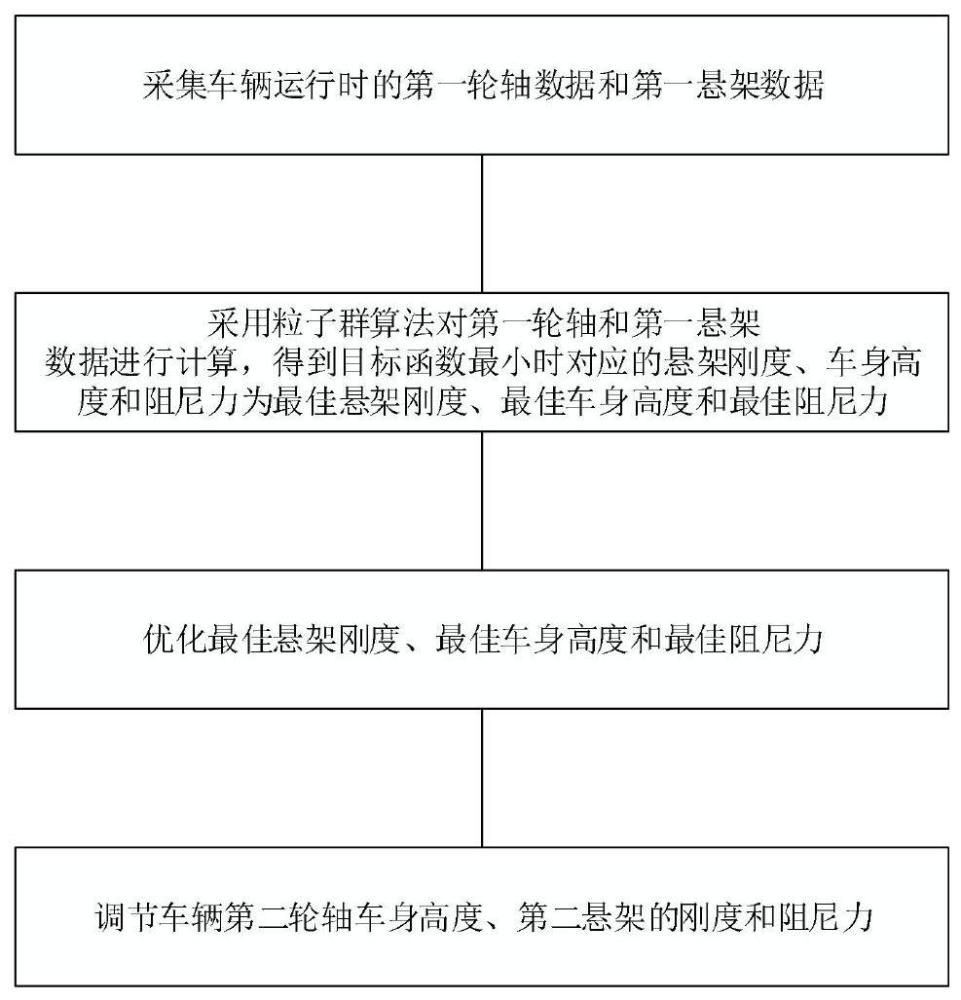
3、采集车辆运行时的第一轮轴数据和第一悬架数据,所述第一轮轴数据包括车辆运行数据、第一轮轴的车身高度;第一悬架数据包括阻尼力和刚度;所述车辆运行数据包括第一轮轴的垂向加速度;
4、采用粒子群算法对上述采集的第一轮轴和第一悬架数据进行计算,得到目标函数最小时对应的悬架刚度、车身高度和阻尼力作为最佳悬架刚度、最佳车身高度和最佳阻尼力;
5、根据所述最佳悬架刚度、最佳车身高度和最佳阻尼力调节车辆第二悬架的刚度、第二轮轴的车身高度和第二悬架的阻尼力;所述刚度是指第二悬架的空气弹簧的刚度,所述阻尼力指第二悬架的减振器的阻尼力。
6、进一步地,所述目标函数或适应度函数包括:
7、f={cbest,hbest,fbest}=f(af,hf,ψf,cf)
8、式中:
9、cbest表示最佳悬架刚度;
10、hbest表示最佳车身高度;
11、fbest表示最佳阻尼力;
12、af表示第一轮轴的垂向加速度;
13、hf表示第一轮轴的高度;
14、ψf表示第一悬架的阻尼比;
15、cf表示第一悬架的刚度。
16、进一步地,包括利用以下约束条件限定粒子寻优的范围:
17、
18、式中:
19、n表示设定的第二悬架的悬架偏频最大值;
20、n表示第二悬架的悬架偏频;
21、cr表示第二悬架的刚度;
22、ms表示簧上质量。
23、hmin<hbest<hmax
24、式中:
25、hmin表示当前车辆状态车身高度的最小值;
26、hmax表示当前车辆状态车身高度的最大值。
27、
28、式中:
29、δ表示第二悬架的阻尼系数;
30、α表示第二悬架减振器与垂直直线的夹角;
31、m表示第二悬架簧载质量的一半;
32、nr表示第二悬架偏频;
33、i表示第二悬架减振器杠杆比;
34、ψr表示第二悬架的阻尼比;
35、ψ1和ψ2分别表示第二悬架的阻尼比的设定最小值和设定最大值。
36、进一步地,得到最佳悬架刚度、最佳车身高度和最佳阻尼力的方法包括:
37、s201:设置粒子群中每个粒子的初始位置和初始速度,包括:每个粒子的位置由一个三维矩阵[ci hi fi]表示,ci表示第二悬架的刚度,hi表示第二轮轴的车身高度,fi表示第二悬架的阻尼力;设置每个粒子的初始位置x0=[rand(0,m),rand(0,m),rand(0,m)],初始速度v0=[0,0,0];m为设定值;
38、s202:计算每个粒子的适应度,并得到全局最优适应度对应的粒子的位置gbest和局部最优适应度对应的粒子的位置pbest;
39、s203:判定是否达到预设的最大迭代次数t1或者在连续多次迭代t2后全局最优粒子是否没有变化,如果是,则全局最优适应度对应的粒子的位置gbest的值作为最佳悬架刚度、最佳车身高度和最佳阻尼力;否则继续下一步骤;
40、s204:根据下式更新粒子的速度和位置;并计算各个粒子的适应度值;
41、vi+1=vi+c1×rand1×(pbest-xi)+c2×rand2×(gbest-xi)
42、xi+1=xi+vi+1
43、式中:
44、i为迭代次数,i=1,2,3,…t;
45、rand1和rand2均为设定范围内的随机数;
46、vi+1为粒子更新后的速度,vi为粒子更新前的速度;
47、xi+1为粒子更新后的位置,xi为粒子更新前的位置;
48、c1和c2为学习因子;
49、pbest表示粒子群本次迭代的局部最优适应度对应的粒子的位置,gbest表示粒子群历史迭代的全局最优适应度对应的粒子的位置;
50、s205:更新每个粒子的局部最优适应度对应的位置和全局最优适应度对应的位置,返回步骤s203。
51、进一步地,调节车辆第二悬架的刚度、第二轮轴的车身高度和第二悬架的阻尼力的方法包括:
52、根据前一计算周期的最佳悬架刚度的权值λ1t、前一计算周期的最佳车身高度的权值λ2t、前一计算周期的最佳阻尼力的权值λ3t、当前计算周期的最佳悬架刚度的权值λ1(t+1)、当前计算周期的最佳车身高度的权值λ2(t+1)、当前计算周期的最佳阻尼力的权值λ3(t+1)进行计算,得出实际需要调节的第二悬架的目标悬架刚度、第二轮轴的目标车身高度和第二悬架的目标阻尼力;所述计算方法包括:
53、cgoal=λ1tct+λ1(t+1)ct+1
54、hgoal=λ2tht+λ2(t+1)ht+1
55、fgoal=λ3tft+λ3(t+1)ft+1
56、式中:
57、cgoal表示第二悬架的目标悬架刚度;
58、hgoal表示第二轮轴的目标车身高度;
59、fgoal表示第二悬架的目标阻尼力;
60、ct表示前一计算周期的最佳悬架刚度;
61、ct+1表示当前计算周期的最佳悬架刚度;
62、ht表示前一计算周期的最佳车身高度;
63、ht+1表示当前计算周期的最佳车身高度;
64、ft表示前一计算周期的最佳阻尼力;
65、ft+1表示当前计算周期的最佳阻尼力;
66、根据所述实际需要调节的第二悬架的目标悬架刚度、第二轮轴的目标车身高度和第二悬架的目标阻尼力调节车辆第二悬架的刚度、第二轮轴的车身高度和第二悬架的阻尼。
67、进一步地,根据所述实际需要调节的第二轮轴的目标车身高度调节第二轮轴的车身高度的方法包括:
68、计算目标车身高度hgoal和实际车身高度hm之间的差值的绝对值δh;
69、δh=|hm-hgoal|
70、对于车身高度上升的过程:
71、当δh大于第一上升门限时,开启第一开关使车身上升;所述第一开关控制气体从气罐流向空气弹簧;
72、在车身上升的过程中,当δh小于第二上升门限时,关闭第一开关。
73、对于车身高度下降过程:
74、当δh大于第一下降门限时,开启第二开关使车身上升;所述第二开关控制气体从空气弹簧流向气罐;
75、在车身上升的过程中,当δh小于第二下降门限时,关闭第二开关。
76、所述第一上升门限和第一下降门限为设定的差值门限,差值大于此差值门限时才对车辆车身高度进行调节,即:
77、当需要对车身进行抬高操作且所述差值绝对值δh大于所述第一上升门限时,或者需要对车身进行下降操作且所述差值绝对值δh大于所述第一下降门限时,才启动车辆车身高度调节,所述第一上升门限和第一下降门限根据实车情况进行设定,在此不作限定。此步骤的技术效果是:可以减少对车身进行频繁调节,延长主动悬架中空气弹簧和电磁阀的寿命。
78、所述第二上升门限和第二下降门限为车身上升或者下降过程中的止停门限,在对车身进行抬高操作时如果所述差值绝对值δh小于所述第二上升门限时,或者在对车身进行下降操作时如果所述差值绝对值δh小于所述第二下降门限时,关闭第一开关或第二开关,停止气罐和空气弹簧内的空气的主动流动;此时车辆依靠气体流动的滞后性和车辆本身的运动惯性会继续运动一段距离直至停止;理想状态下,当车身停止垂直方向的运动时,车辆的实际车身高度与目标车身高度一致。
79、实现本发明目的之二的一种主动悬架预控制系统,包括:
80、数据采集模块:用于采集车辆运行时的第一轮轴数据和第一悬架数据,所述第一轮轴数据包括车辆运行数据、第一轮轴的车身高度;所述第一悬架的数据包括阻尼力和刚度;所述车辆运行数据包括第一轮轴的垂向加速度;
81、参数计算模块:用于采用粒子群算法对上述采集的第一轮轴和第一悬架数据进行计算,得到目标函数最小时对应的悬架刚度、车身高度和阻尼力作为最佳悬架刚度、最佳车身高度和最佳阻尼力;
82、车辆调节模块:用于根据所述最佳悬架刚度、最佳车身高度和最佳阻尼力调节车辆第二悬架的悬架刚度、第二轮轴的车身高度和第二悬架的阻尼力。
83、进一步地,所述参数计算模块包括:
84、粒子群初始化模块:用于随机初始化粒子群;每个粒子由一个三维矩阵[ci hi fi]组成,ci表示第二悬架的刚度,hi表示第二轮轴的车身高度,fi表示第二悬架的阻尼力;每个粒子的初始位置为x0=[rand(0,m),rand(0,m),rand(0,m)],初始速度为v0=[0,0,0];m为设定值;
85、粒子适应度计算模块:用于计算每个粒子的适应度,并得到全局最优适应度对应的粒子的位置gbest和局部最优适应度对应的粒子的位置pbest;
86、判定模块:用于判定是否达到预设的最大迭代次数t1或者在连续多次迭代t2后全局最优粒子是否没有变化,如果是,则全局最优适应度对应的粒子的位置gbest的值作为最佳悬架刚度、最佳车身高度和最佳阻尼力;
87、粒子更新模块:用于更新粒子的速度和位置;并计算各个粒子的适应度值;
88、最优值更新模块:用于更新每个粒子的局部最优适应度对应的位置和全局最优适应度对应的位置。
89、进一步地,所述车辆调节模块包括:
90、目标参数计算模块:用于根据前一计算周期的最佳悬架刚度的权值λ1t、前一计算周期的最佳车身高度的权值λ2t、前一计算周期的最佳阻尼力的权重λ3t、当前计算周期的最佳悬架刚度的权重λ1(t+1)、当前计算周期输出的最佳车身高度的权重λ2(t+1)、当前计算周期车输出的最佳阻尼力的权重λ3(t+1)计算实际需要调节的第二悬架的目标悬架刚度、第二轮轴的目标车身高度和第二悬架的目标阻尼力;
91、悬架调节模块:用于根据所述实际需要调节的目标悬架刚度、目标车身高度和目标阻尼力调节车辆第二轮轴的车身高度、第二悬架的刚度和阻尼力。
92、进一步地,还包括第一车身高度调节模块:用于在实际车身高度低于目标车身高度时控制车身上升;包括:计算目标车身高度hgoal和实际车身高度hm之间的差值的绝对值δh;当δh大于第一上升门限时,开启第一开关使车身上升;在车身上升的过程中,当δh小于第二上升门限时,关闭第一开关。
93、进一步地,还包括第二车身高度调节模块:用于在实际车身高度高于目标车身高度时控制车身下降;包括:计算目标车身高度hgoal和实际车身高度hm之间的差值的绝对值δh;当δh大于第一下降门限时,开启第二开关使车身上升;在车身上升的过程中,当δh小于第二下降门限时,关闭第二开关。
94、本发明的有益效果包括:
95、本发明通过采集车辆的第一轮轴和第一悬架的数据将车辆传感器的实时数据充分利用起来,使得当采用主动悬架的车辆的图像采集装置发生故障时,采用粒子群算法计算出每个时间周期的车辆第二轮轴的最佳车身高度、第二悬架的最佳悬架刚度和阻尼力;即利用第一悬架和第一轮轴的数据,通过算法优化输出第二悬架和第二轮轴的数据,从而及时对车辆第二轮轴的车身高度、第二悬架的悬架刚度和阻尼力及时进行预调节,提高了车辆驾乘的舒适性;本发明解决了现有技术中所需要的样本数据量较大的问题;同时数据来源相对现有技术更加方便,且实时性更高,提高了采用预瞄控制的主动悬架系统车辆的乘坐舒适性。
- 还没有人留言评论。精彩留言会获得点赞!