一种智能铁鞋溜逸报警系统的制作方法
[0001]
本发明涉及铁路列车防溜领域,具体涉及一种智能铁鞋溜逸报警系统及其检测方法。
背景技术:
[0002]
智能铁鞋是铁道调车作业防滑防溜逸工具之一,尤其在我国铁路,智能铁鞋是眼下列车防溜逸方式的必然之选。列车防溜逸工作受到了铁道部门管理的高度重视,是列车是否能够平稳进站以及安全行驶出站的关键,智能铁鞋的设置是这一关键问题的重要解决方法。
[0003]
若列车进站时铁鞋未安放或者放置不到位,容易引起车辆溜逸。目前,智能铁鞋还不能准确检测出列车是否溜逸,也无法高精度计算出溜逸距离,不少车站场时有溜逸事故出现。
[0004]
以前本公司提出发明专利申请“一种铁道车辆停车智能防溜系统及其方法”,公布号cn104240477a,它实现了对防溜装置放置到位、压鞋、被盗等状态等信息的实时监控。
[0005]
但其溜逸报警和溜逸距离计算方法,均基于对水平加速度的积分运算:加速度一次积分获得速度,若速度持续大于0,则产生溜逸报警;对加速度进行二次积分获得距离,从而计算出溜逸距离。这种发明在理想实验条件下加速度平稳可以获得溜逸报警状态和溜逸距离;然在实际工程应用中,由于智能铁鞋受列车车辆压迫在轨道上溜逸时,加速度大小、方向变化剧烈且极易饱和,根本无法准确产生溜逸报警,计算的溜逸距离误差极大。这不仅容易造成防溜事故,对事故的事后追忆以及故障分析造成了不利影响,因此需要不断改进智能铁鞋溜逸报警及溜逸距离计算方式,大幅提升溜逸报警准确度和溜逸距离精度意义重大。
技术实现要素:
[0006]
为了解决智能铁鞋在实际应用中,由于加速度大小、方向变化剧烈且极易饱和,造成的溜逸报警误报率极高和计算的溜逸距离误差极大的问题。本发明一种智能铁鞋溜逸报警系统包括多对智能铁鞋、路由器、协调器及监控上位机。所述智能铁鞋包括开关机模块、zigbee通信模块、电量统计模块、距离测量模块、加速度测量模块和中央控制模块;所述的距离测量模块检测智能铁鞋至火车车轮距离,所述加速度测量模块采集智能铁鞋加速度数据;所述中央控制模块接收距离测量模块发送的距离数据和加速度测量模块发送的加速度数据,然后基于加速度数据计算智能铁鞋自身放置倾角和震动强度。中央控制模块基于智能铁鞋至火车车轮距离判断距离是否到位,基于智能铁鞋自身放置倾角判断姿态是否正常,若智能铁鞋到车轮的距离到位且智能铁鞋姿态正常,中央控制模块判断智能铁鞋放置到位,否则产生不到位则报警;在智能铁鞋距离到位条件下,中央控制模块基于震动强度及其持续时间判断当前是否发生溜逸或其他业务状态,若发生溜逸或其他业务状态变化则立即启动周期性发送溜逸报警及业务状态数据事件。所述路由器及协调器构成zigbee无线传
输网络,用于将成对的智能铁鞋业务数据传输至所述监控上位机,监控上位机接收到某智能铁鞋溜逸报警后,综合其伙伴智能铁鞋距离和速度信息,计算智能铁鞋溜逸距离,同时展示智能铁鞋的其他业务信息。
[0007]
中央控制模块接收到超声波测距模块检测的智能铁鞋到火车车轮的距离l,并设定到位距离阈值ls=20cm;
[0008]
当l≤ls时,则判定智能铁鞋到火车车轮距离到位;
[0009]
当l>ls时,则判定智能铁鞋到火车车轮距离不到位;
[0010]
基于接收加速度检测模块测量的三轴加速度计算出智能铁鞋的放置倾角;其中:前后向倾角左右向的倾角α
z
为上下向的倾角;a
x
、a
y
、a
z
分别为智能铁鞋在x、y、z轴方向上的加速度;并设置正常倾角阈值α=30
°
。
[0011]
当α
x
<α且α
y
<α时,判定智能铁鞋姿态正常,否则判定铁鞋姿态放置不正常。
[0012]
若智能铁鞋到车轮的距离到位且智能铁鞋姿态正常,则智能铁鞋业务状态是放置到位,否则业务状态是放置不到位,发出放置不到位报警。
[0013]
中央控制模块接收加速度测量模块发送的加速度数据,然后基于加速度数据计算震动强度。所述震动强度以加速度的模的标准差来表征,具体计算过程为:
[0014]
(1)依次接收n个(n取10)三轴加速度形成队列,第i时刻(i=1,2,3
…
n)的三轴加速度包括智能铁鞋x轴方向加速度y轴方向加速度和z轴方向加速度
[0015]
(2)计算第i时刻三轴加速度的模为
[0016]
(3)计算当前n个时刻三轴加速度模的平均值为
[0017]
(4)计算当前n个时刻三轴加速度的模的标准差:
[0018]
(5)震动强度q=标准差6;
[0019]
(6)接收下一个三轴加速度,与其前n-1个三轴加速度构成新的n个三轴加速度队列,返回步骤(1)重复执行,获得下一个三轴加速度的震动强度q。
[0020]
智能铁鞋溜逸或其他业务状态的低功耗计算判断步骤:
[0021]
(1)测量加速度数据,判断加速度是否大于唤醒值;
[0022]
(2)若加速度小于唤醒值,则转到步骤(6);若加速度大于唤醒值,则转到步骤(3);
[0023]
(3)设置数据采集队列长度n,启动计时器;
[0024]
(4)计算智能铁鞋的震动强度q,统计其持续时间t;
[0025]
(5)基于q和t判断当前是否发生溜逸或其他业务状态,生成溜逸警活其他业务状态数据;
[0026]
(6)进入休眠,等待下一次中断;
[0027]
(7)结束。
[0028]
在智能铁鞋距离到位条件下,中央控制模块基于震动强度及其持续时间判断当前是否发生溜逸或其他业务状态:
[0029]
当震动强度q>1500且持续时间t>5s时,判定为智能铁鞋发生溜逸,产生溜逸报警
数据;
[0030]
当2500>震动强度q>1000且持续时间0.5s<t<1s,判定智能铁鞋业务为设防场景;
[0031]
当震动强度q≥2500且持续时间0.5s<t<1s,判定智能铁鞋业务为撤防场景;
[0032]
当震动强度q<200时,判定智能铁鞋业务为静置场景。
[0033]
监控上位机实时接收智能铁鞋溜逸报警状态及其他业务数据,若接收到某智能铁鞋溜逸报警后,综合其伙伴智能铁鞋距离和速度信息,计算智能铁鞋溜逸距离;所述伙伴智能铁鞋的定义为:智能铁鞋成对设置于同一车轮的两侧,成对的两个智能铁鞋互为伙伴关系;
[0034]
计算该智能铁鞋溜逸距离的具体工作步骤如下:
[0035]
(1)智能铁鞋溜逸报警状态a
f
置1,确认伙伴智能铁鞋,立即记录伙伴智能铁鞋至车轮距离当前距离初值s为s0,启动计时器;
[0036]
(2)读取该智能铁鞋溜逸状态并更新a
f
值,若接收到溜逸报警,则a
f
置1,否则a
f
清0;读取伙伴智能铁鞋s的数值;
[0037]
(3)根据事先设定的有效测距距离s1=1m,判断伙伴智能铁鞋s是否小于有效测距距离s1;
[0038]
(4)若s<s1,马上判断该智能铁鞋状态a
f
是否等于1;若s≥s1,转到步骤(6);
[0039]
(5)若a
f
≠1,记录此时伙伴智能铁鞋至车轮距离s为s2,则智能铁鞋溜逸距离为l=s
2-s0;若a
f
=1,则返回至步骤(2);
[0040]
(6)记录s=s1时所用时间t1,判断该智能铁鞋状态a
f
是否等于1;
[0041]
(7)若a
f
≠1,结束记时,记录溜逸结束时间t2,则智能铁鞋溜逸距离为l=t2*(s
1-s0)/t1;若a
f
=1,则返回至步骤(2);
[0042]
(8)结束。
[0043]
有益效果
[0044]
本发明公开了一种智能铁鞋溜逸报警系统及其检测方法,基于智能铁鞋至火车车轮距离判断距离是否到位,基于智能铁鞋自身放置倾角判断姿态是否正常,通过计算加速度模的标准差与震动强度比较来判断是否发生溜逸或其他业务状态。
[0045]
解决了智能铁鞋在实际应用中,由于加速度大小、方向变化剧烈且极易饱和,造成的溜逸报警误报率极高和计算的溜逸距离误差极大的问题;基于以标准差表征的震动强度及其持续时间,可以区分更多的不同业务工况情形,业务工况情形包括溜逸、设防、撤防和静置;若判定智能铁鞋发生溜逸,系统立即产生溜逸报警。在出现溜逸报警后可以综合其伙伴智能铁鞋距离和速度信息,准确计算智能铁鞋溜逸距离。
[0046]
新的智能铁鞋溜逸报警系统同时大大提高溜逸报警精度和溜逸距离计算精度,对于铁路防溜业务、事后分析修正意义明显,从而大大提高了铁路行车安全性。
附图说明
[0047]
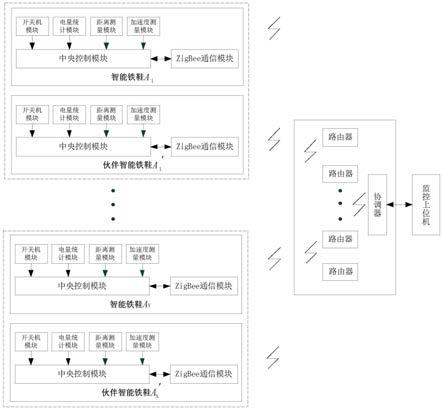
图1系统整体框架图
[0048]
图2智能铁鞋溜逸或其他业务状态的低功耗计算判断步骤流程图
[0049]
图3溜逸距离计算流程图
具体实施方式
[0050]
下面结合附图,对本发明的具体实施方式作进一步说明。该智能铁鞋安装在北方某大型车站。
[0051]
结合图1,一种智能铁鞋溜逸报警系统包括多对智能铁鞋、路由器、协调器及监控上位机。所述智能铁鞋包括开关机模块、zigbee通信模块、电量统计模块、距离测量模块、加速度测量模块和中央控制模块;所述的距离测量模块检测智能铁鞋至火车车轮距离,所述加速度测量模块采集智能铁鞋加速度数据;所述中央控制模块接收距离测量模块发送的距离数据和加速度测量模块发送的加速度数据,然后基于加速度数据计算智能铁鞋自身放置倾角和震动强度。中央控制模块基于智能铁鞋至火车车轮距离判断距离是否到位,基于智能铁鞋自身放置倾角判断姿态是否正常,若智能铁鞋到车轮的距离到位且智能铁鞋姿态正常,中央控制模块判断智能铁鞋放置到位,否则产生不到位则报警;在智能铁鞋距离到位条件下,中央控制模块基于震动强度及其持续时间判断当前是否发生溜逸或其他业务状态,若发生溜逸或其他业务状态变化则立即启动周期性发送溜逸报警及业务状态数据事件。所述路由器及协调器构成zigbee无线传输网络,用于将成对的智能铁鞋业务数据传输至所述监控上位机,监控上位机接收到某智能铁鞋溜逸报警后,综合其伙伴智能铁鞋距离和速度信息,计算智能铁鞋溜逸距离,同时展示智能铁鞋的其他业务信息。
[0052]
中央控制模块接收到超声波测距模块检测的智能铁鞋到火车车轮的距离l,并设定到位距离阈值ls=20cm;
[0053]
当l≤ls时,则判定智能铁鞋到火车车轮距离到位;
[0054]
当l>ls时,则判定智能铁鞋到火车车轮距离不到位;
[0055]
基于接收加速度检测模块测量的三轴加速度计算出智能铁鞋的放置倾角;其中:前后向倾角左右向的倾角α
z
为上下向的倾角;a
x
、a
y
、a
x
分别为智能铁鞋在x、y、z轴方向上的加速度;并设置正常倾角阈值α=30
°
。
[0056]
当α
x
<α且α
y
<α时,判定智能铁鞋姿态正常,否则判定铁鞋姿态放置不正常。
[0057]
若智能铁鞋到车轮的距离到位且智能铁鞋姿态正常,则智能铁鞋业务状态是放置到位,否则业务状态是放置不到位,发出放置不到位报警。
[0058]
结合图2,中央控制模块接收加速度测量模块发送的加速度数据,然后基于加速度数据计算震动强度。所述震动强度以加速度的模的标准差来表征,具体计算过程为:
[0059]
(1)依次接收n个(n取10)三轴加速度形成队列,第i时刻(i=1,2,3
…
n)的三轴加速度包括智能铁鞋x轴方向加速度y轴方向加速度和z轴方向加速度
[0060]
(2)计算第i时刻三轴加速度的模为
[0061]
(3)计算当前n个时刻三轴加速度模的平均值为
[0062]
(4)计算当前n个时刻三轴加速度的模的标准差:
[0063]
(5)震动强度q=标准差σ;
[0064]
(6)接收下一个三轴加速度,与其前n-1个三轴加速度构成新的n个三轴加速度队
列,返回步骤(1)重复执行,获得下一个三轴加速度的震动强度q。
[0065]
智能铁鞋溜逸或其他业务状态的低功耗计算判断步骤:
[0066]
(1)测量加速度数据,判断加速度是否大于唤醒值;
[0067]
(2)若加速度小于唤醒值,则转到步骤(6);若加速度大于唤醒值,则转到步骤(3);
[0068]
(3)设置数据采集队列长度n,启动计时器;
[0069]
(4)计算智能铁鞋的震动强度q,统计其持续时间t;
[0070]
(5)基于q和t判断当前是否发生溜逸或其他业务状态,生成溜逸警活其他业务状态数据;
[0071]
(6)进入休眠,等待下一次中断;
[0072]
(7)结束。
[0073]
在智能铁鞋距离到位条件下,中央控制模块基于震动强度及其持续时间判断当前是否发生溜逸或其他业务状态:
[0074]
当震动强度q>1500且持续时间t>5s时,判定为智能铁鞋发生溜逸,产生溜逸报警数据;
[0075]
当2500>震动强度q>1000且持续时间0.5s<t<1s,判定智能铁鞋业务为设防场景;
[0076]
当震动强度q≥2500且持续时间0.5s<t<1s,判定智能铁鞋业务为撤防场景;
[0077]
当震动强度q<200时,判定智能铁鞋业务为静置场景。
[0078]
监控上位机接收到某智能铁鞋溜逸报警后,综合其伙伴智能铁鞋距离和速度信息,计算智能铁鞋溜逸距离。(智能铁鞋成对使用,一个移动通过另一个检测距离作为溜逸距离,同时估算速度,超过1m,以估算速度乘以时间获得)智能铁鞋成对使用分置于同一车轮的两侧,成对的两个智能铁鞋互为伙伴关系。
[0079]
结合图3,监控上位机实时接收智能铁鞋溜逸报警状态及其他业务数据,若接收到某智能铁鞋溜逸报警后,综合其伙伴智能铁鞋距离和速度信息,计算该智能铁鞋溜逸距离的具体工作步骤如下:
[0080]
(1)智能铁鞋溜逸报警状态a
f
置1,确认伙伴智能铁鞋,立即记录伙伴智能铁鞋至车轮距离当前距离初值s为s0,启动计时器;
[0081]
(2)读取该智能铁鞋溜逸状态并更新a
f
值,若接收到溜逸报警,则a
f
置1,否则a
f
清0;读取伙伴智能铁鞋s的数值;
[0082]
(3)根据事先设定的有效测距距离s1=1m,判断伙伴智能铁鞋s是否小于有效测距距离s1;
[0083]
(4)若s<s1,马上判断该智能铁鞋状态a
f
是否等于1;若s≥s1,转到步骤(6);
[0084]
(5)若a
f
≠1,记录此时伙伴智能铁鞋至车轮距离s为s2,则智能铁鞋溜逸距离为l=s
2-s0;若a
f
=1,则返回至步骤(2);
[0085]
(6)记录s=s1时所用时间t1,判断该智能铁鞋状态a
f
是否等于1;
[0086]
(7)若a
f
≠1,结束记时,记录溜逸结束时间t2,则智能铁鞋溜逸距离为l=t2*(s
1-s0)/t1;若a
f
=1,则返回至步骤(2);
[0087]
(8)结束;
[0088]
本实施例以本发明技术方案为前提进行实施,但本发明的保护范围不限于下述的
实施例。
[0089]
本发明已通过上述实施例及其附图说明清楚,在不背离本发明精神和实质的情况下,所属领域的技术人员可根据本发明做出相应变化和修正,这些变化和修正都属于本发明权利要求的保护范围。本发明未涉及方法均与现有技术相同或可采用现有技术加以实现。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1