适用于超高速磁浮交通系统的远程驾驶方法及装置与流程
本发明涉及超高速磁悬浮交通,尤其涉及一种适用于超高速磁浮交通系统的远程驾驶方法及装置。
背景技术:
1、超高速低真空管道磁浮交通系统是一种运行于低真空密闭管道内、采用磁悬浮与电磁推进技术的新一代地面交通工具,初期目标运营时速可达1000km/h。磁浮列车所运行的管道环境,为全密闭的低真空环境,在非复压情况下人体无法在其中进行活动。正常情况下,磁浮列车由全自动的运行控制系统指挥调度运行至车站内,乘客才可以通过接驳系统进行上下车。
2、然而,一旦在列车运行过程中,运行控制系统或者车地无线通信系统发生故障,运行控制系统将触发紧急制动进行停车,并且在故障无法解除的情况下,由于故障-安全策略系统就将禁止列车继续自动驾驶。因此在这种情况下,需要将运行控制系统进行降级,转为由人工驾驶列车行驶到接驳地点。
3、但是由于超高速低真空管道磁浮交通系统的特殊性,列车运行的动力输出设备并没有在列车上,而是在列车所在位置的分区牵引控制来输出牵引力。在这种限制下,人工驾驶将无法从列车上进行。因此,需要一种能够控制磁浮列车运行至接驳点的远程驾驶方法及装置。
技术实现思路
1、本发明提供了一种适用于超高速磁浮交通系统的远程驾驶方法及装置,能够解决现有技术中的技术问题。
2、本发明提供了一种适用于超高速磁浮交通系统的远程驾驶方法,其中,该方法包括:
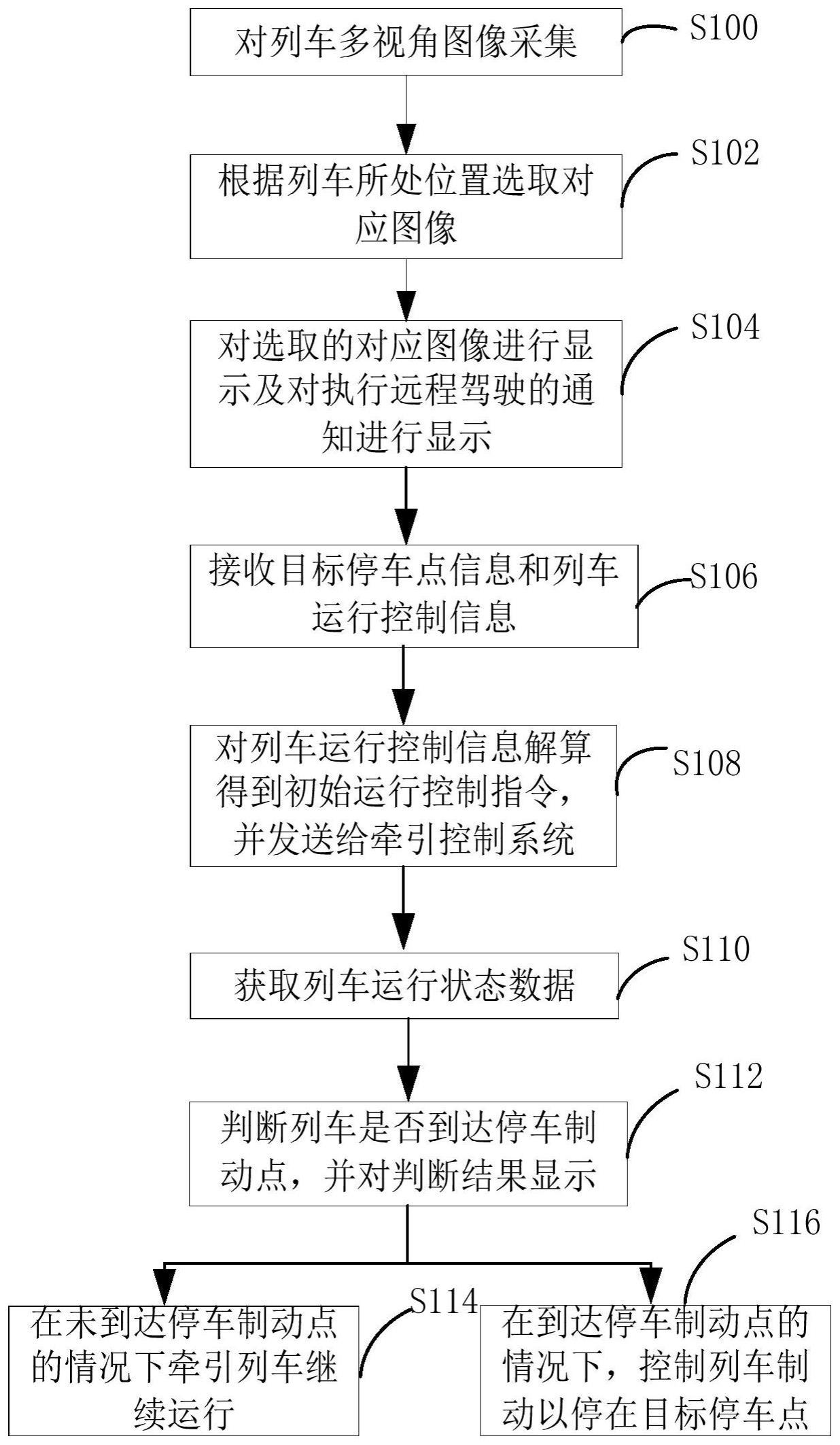
3、对磁浮列车进行多视角图像采集;
4、根据所述列车所处位置选取对应图像;
5、对所选取的对应图像进行显示以及对执行远程驾驶的通知进行显示;
6、接收目标停车点信息和列车运行控制信息;
7、对所述列车运行控制信息进行解算,得到初始运行控制指令,并发送给牵引控制系统以牵引所述列车启动运行;
8、获取列车运行状态数据;
9、判断所述列车是否到达停车制动点,并对判断结果进行显示;
10、在未到达停车制动点的情况下,根据所述列车运行控制信息、所述列车运行状态数据和所述牵引控制系统反馈的数据计算得到实时运行控制指令,并发送给所述牵引控制系统以牵引所述列车继续运行;
11、在到达停车制动点的情况下,根据所述目标停车点信息、所述列车运行控制信息、所述列车运行状态数据和所述牵引控制系统反馈的数据计算得到制动控制指令,并根据所述制动控制指令控制所述列车制动以使所述列车停在目标停车点。
12、根据本发明一种实施例,该方法还包括:
13、获取运行环境数据;
14、根据所述运行状态数据和所述运行环境数据判断是否输出报警提示信号。
15、根据本发明一种实施例,根据所述运行状态数据和所述运行环境数据判断是否输出报警提示信号包括:
16、在所述运行状态数据和/或所述运行环境数据存在异常的情况下,输出报警提示信号。
17、根据本发明一种实施例,所述制动控制指令包括制动方式。
18、根据本发明一种实施例,所述制动方式包括盘式制动。
19、本发明还提供了一种适用于超高速磁浮交通系统的远程驾驶装置,其中,该装置包括:
20、图像采集单元,用于对磁浮列车进行多视角图像采集;
21、图像自动选取单元,用于根据所述列车所处位置选取对应图像;
22、显示单元,用于对所选取的对应图像进行显示以及对执行远程驾驶的通知进行显示;
23、接收单元,用于接收目标停车点信息和列车运行控制信息;
24、解析处理单元,用于对所述列车运行控制信息进行解算,得到初始运行控制指令,并发送给牵引控制系统以牵引所述列车启动运行;
25、获取单元,用于获取列车运行状态数据;
26、所述解析处理单元还用于判断所述列车是否到达停车制动点;
27、所述显示单元还用于对判断结果进行显示;
28、所述解析处理单元还用于在未到达停车制动点的情况下,根据所述列车运行控制信息、所述列车运行状态数据和所述牵引控制系统反馈的数据计算得到实时运行控制指令,并发送给所述牵引控制系统以牵引所述列车继续运行;
29、所述解析处理单元还用于在到达停车制动点的情况下,根据所述目标停车点信息、所述列车运行控制信息、所述列车运行状态数据和所述牵引控制系统反馈的数据计算得到制动控制指令,并根据所述制动控制指令控制所述列车制动以使所述列车停在目标停车点。
30、根据本发明一种实施例,所述获取单元还用于获取运行环境数据,所述解析处理单元还用于根据所述运行状态数据和所述运行环境数据判断是否输出报警提示信号。
31、根据本发明一种实施例,根据所述运行状态数据和所述运行环境数据判断是否输出报警提示信号包括:
32、在所述运行状态数据和/或所述运行环境数据存在异常的情况下,输出报警提示信号。
33、根据本发明一种实施例,所述制动控制指令包括制动方式。
34、根据本发明一种实施例,所述制动方式包括盘式制动。
35、通过上述技术方案,可以为远程操作人员提供人工驾驶的能力,弥补了在车地无线通信系统故障、地面自动运行控制系统故障等情况下,无法将列车移动到安全接驳点的问题。
技术特征:
1.一种适用于超高速磁浮交通系统的远程驾驶方法,其特征在于,该方法包括:对磁浮列车进行多视角图像采集;
2.根据权利要求1所述的方法,其特征在于,该方法还包括:
3.根据权利要求2所述的方法,其特征在于,根据所述运行状态数据和所述运行环境数据判断是否输出报警提示信号包括:
4.根据权利要求1-3中任一项所述的方法,其特征在于,所述制动控制指令包括制动方式。
5.根据权利要求4所述的方法,其特征在于,所述制动方式包括盘式制动。
6.一种适用于超高速磁浮交通系统的远程驾驶装置,其特征在于,该装置包括:
7.根据权利要求6所述的装置,其特征在于,所述获取单元还用于获取运行环境数据,所述解析处理单元还用于根据所述运行状态数据和所述运行环境数据判断是否输出报警提示信号。
8.根据权利要求7所述的装置,其特征在于,根据所述运行状态数据和所述运行环境数据判断是否输出报警提示信号包括:
9.根据权利要求6-8中任一项所述的装置,其特征在于,所述制动控制指令包括制动方式。
10.根据权利要求9所述的装置,其特征在于,所述制动方式包括盘式制动。
技术总结
本发明提供了一种适用于超高速磁浮交通系统的远程驾驶方法及装置,该方法包括:采集列车的多视角图像;根据列车所处位置选取对应图像;显示对应图像及执行远程驾驶的通知;接收目标停车点信息和列车运行控制信息;对列车运行控制信息进行解算得到初始运行控制指令,并发送给牵引控制系统;获取列车运行状态数据;判断列车是否到达停车制动点,并显示判断结果;如未到达,根据列车运行控制信息、列车运行状态数据和牵引控制系统反馈的数据计算得到实时运行控制指令,并发送给牵引控制系统;如到达,根据目标停车点信息、列车运行控制信息、列车运行状态数据和牵引控制系统反馈的数据计算得到制动控制指令,并根据制动控制指令控制列车制动。
技术研发人员:金成日,张艳清,刘通,胡良辉,陈松
受保护的技术使用者:中国航天科工飞航技术研究院(中国航天海鹰机电技术研究院)
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!