一种智能化的矿用轨道巡检车的制作方法
本发明涉及矿用巡检车领域,具体而言,涉及一种智能化的矿用轨道巡检车。
背景技术:
1、在煤炭行业全面进入信息化建设时代下,各煤矿投入了大量资金装备各种保障安全生产的系统和设备,实践表明,这些系统和设备在一定程度上提升了煤矿的安全生产水平,但对矿区运输铁路的管理信息化程度依然较低,特别是对重点区域的巡检手段、优化管理措施等方面还处于比较落后的水平。矿山自有铁路与国铁铁路相比,具有封闭性较低的特点,这就导致矿山自有铁路更容易遭受侵限和损伤。若障碍物不及时清除或轨道损伤不及时修复,就可能造成列车运行受阻、受撞,钢轨过度形变甚至断裂等危害列车运行安全的事故,所以对铁路轨道进行及时巡检是保证铁路安全运行的重要措施。
2、矿山自有铁路沿线巡查的目的是掌握铁路运行状况及环境的变化,发现铁路设施缺陷、危及线路安全的隐患等安全隐患,保证线路运输安全和矿区安全生产。本发明针对矿山自有铁路沿线巡查的应用需求,实现通过机器视觉检测铁路侵限障碍物,实现通过机械爪自动清障,实现在铁路沿线日常巡视和故障查找中实现巡检车自主运行的稳定和抗干扰控制以及全区域覆盖,实现稳定有效地获取、存储和接收巡检车工作过程中的状态、位置、预警信息,实现巡检车的远程测控。通过形成操作规程与巡查规程,将巡检车应用于铁路沿线和采空区的日常巡检和安全隐患侦测,达到无需人工现场作业,显著提高安全隐患查找的效率和质量。
技术实现思路
1、为了弥补以上不足,本发明提供了一种智能化的矿用轨道巡检车,旨在改善导致矿山自有铁路更容易遭受侵限和损伤。若障碍物不及时清除或轨道损伤不及时修复,就可能造成列车运行受阻、受撞,钢轨过度形变甚至断裂等危害列车运行安全的事故等问题。
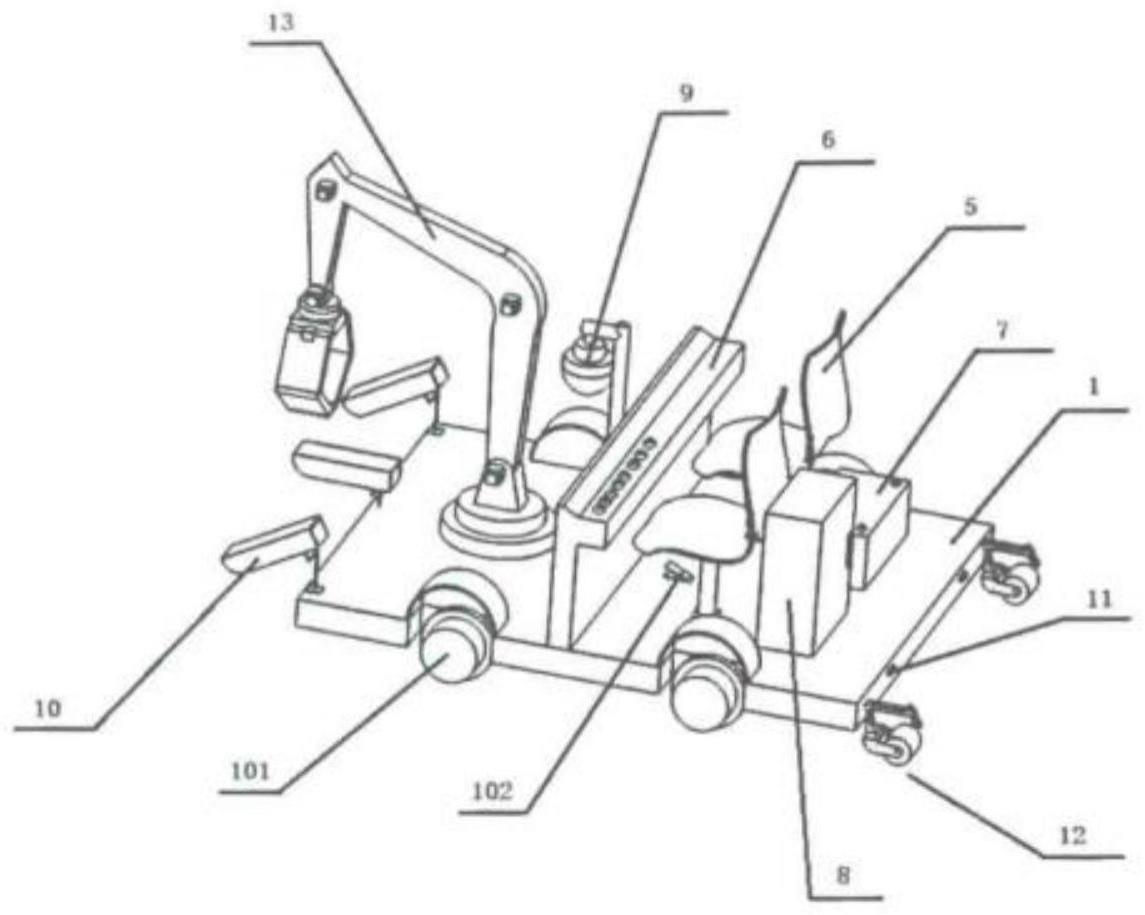
2、本发明实施例提供了一种智能化的矿用轨道巡检车,包括有轨道车底盘,所述轨道车底盘的下方安装有直流无刷电机、碟刹机构和电磁刹车机构,所述轨道车底盘上方安装有座椅、操控台、高能锂电池、智能控制器、行车相机、视觉检测相机、超声波雷达、超声波探伤传感器和伺服机械爪机构;
3、所述直流无刷电机固定安装在所述轨道车底盘的下方中间位置,所述直流无刷电机的一侧传动连接有传动机构,所述传动机构通过传动轴杆将动力传递至四个车轮,所述碟刹机构和所述电磁刹车机构安装在所述轨道车底盘下方靠后的车轴上,所述行车相机安装在所述轨道车底盘的上方中间位置,所述行车相机通过相机支架固定安装,三台所述视觉检测相机分别安装在所述轨道车底盘前端的左、中、右位置,两个所述超声波雷达分别安装在所述轨道车底盘后端中间偏左、中间偏右的位置上,两台所述超声波探伤传感器分别安装在所述轨道车底盘后端左、右位置,所述超声波探伤传感器与铁路轨道位于同一垂直面,所述伺服机械爪机构安裝在所述轨道车底盘上方前端位置。
4、在上述实现过程中,本发明利用智能化的矿用轨道巡检车巡线,可以减轻巡线员长距离巡线的劳动强度,防止因巡线员疲劳带来的漏检,降低铁运线路的运行维护成本,巡检车搭载有行车相机和视觉检测相机,超声波雷达和超声波探伤传感器,以及智能控制器,在铁路轨道上运行的过程中,可及时对轨道,上障碍物、轨道的损伤进行检测与预警,通过伺服机械爪机构及时清除中小型障碍物,及时发现隐患位置,为巡查人员提供检修的依据,可极大地节约人工巡检的时间,大大提高工作效率与精确度。
5、在一种具体的实施方案中,四个所述车轮分别安装在前后两个车轴的端部,前后两个所述车轴分别与所述传动轴杆进行传动连接,所述轨道车底盘的中部安装有刹车器,所述刹车器与所述碟刹机构连接。
6、在上述实现过程中,通过车轮的设定可以便于轨道车底盘进行移动,并且刹车器可以实现对碟刹机构进行连接,实现对轨道车底盘进行制动控制。
7、在一种具体的实施方案中,所述座椅固定安装在所述轨道车底盘上方中部靠后位置,所述操控台安装在所述座椅的前方,所述高能锂电池与所述智能控制器安装在所述座椅的后方。
8、在上述实现过程中,座椅的设定可以便于操作者进行坐着,以及操控台的设定便于实现对设备进行控制调节,以及高能锂电池可以实现对设备进行供电,智能控制器可以实现对设备进行控制调节,并且实现对数据信息进行计算处理。
9、在一种具体的实施方案中,所述操控台包括有安装板,所述安装板固定安装在所述轨道车底盘的上部,所述安装板的上部镶嵌安装有若干控制按键,所述控制按键中包括有紧急停车按钮,所述紧急停车按钮与所述电磁刹车机构电性连接。
10、在上述实现过程中,安装板的设定便于进行操作控制,以及控制按键便于进行控制操作。
11、在一种具体的实施方案中,所述高能锂电池与所述智能控制器电性连接,所述智能控制器与所述控制按键电性连接,所述智能控制器还分别与所述行车相机、所述视觉检测相机、所述超声波雷达、所述超声波探伤传感器和所述伺服机械爪机构电性连接。
12、在上述实现过程中,高能锂电池的设定实现对其他的电子设备进行供电,保持其他的电子设备能够实现稳定运行操作。
13、在一种具体的实施方案中,所述伺服机械爪机构包括有固定安装在所述轨道车底盘上的固定座,所述固定座上转动安装有连接头,所述连接头上通过伺服电机连接有第一机械臂,所述第一机械臂的另一端通过伺服电机连接有第二机械臂,所述第二机械臂的另一端通过伺服电机连接有第三机械臂,所述第三机械臂的端部连接有伺服机械爪。
14、在上述实现过程中,伺服机械爪机构的设定可以实现对轨道上的杂物进行清理,并且多级机械臂的设定,便于实现多方位,大距离的调节控制。
15、在一种具体的实施方案中,所述智能控制器的内部集成有工控机、深度学习主机、物联网数传模块、gps/北斗定位模块。
16、在上述实现过程中,智能控制器汇总的工控机能够实现对设备进行控制调节,以及深度学习主机能够实现对数据信息进行计算处理,物联网数传模块能够实现对数据信息进行远程传输和远程控制调节,以及gps/北斗定位模块能够实现对设备进行定位。
17、在一种具体的实施方案中,所述超声波探伤传感器为轮式探头结构,所述超声波探伤传感器与铁路钢轨的接触方式为滚动接触;所述超声波探伤传感器在工作中自动补充介质液。
18、在上述实现过程中,超声波探伤传感器采用轮式探头结构便于实现与轨道进行贴合,实现对轨道进行检测,且自动补充介质液可以防止超声波探伤传感器在接触摩擦的过程中发生损坏。
19、在一种具体的实施方案中,所述行车相机的拍摄方向在0-360°范围内调节,所述行车相机具备对讲功能;
20、所述视觉检测相机通过安装支架与底盘相连,所述安装支架的姿态通过电动调整,具备水平、竖直两个方向的自由度。
21、在上述实现过程中,行车相机可以实现对设备的运行过程进行拍摄,且能够实现远程通话,以及视觉检测相机通过安装支架进行固定,便于实现电动调节控制。
22、在一种具体的实施方案中,所述轨道车底盘采用钛合金材质制成,所述车轮采用的是为单边轨道轮。
23、在上述实现过程中,钛合金材质制成的轨道车底盘能够提高强度,提高使用寿命,且单边轨道轮可以防止脱落,保持运行的稳定性。
24、与现有技术相比,本发明的有益效果:
25、本发明利用智能化的矿用轨道巡检车巡线,可以减轻巡线员长距离巡线的劳动强度,防止因巡线员疲劳带来的漏检,降低铁运线路的运行维护成本,巡检车搭载有行车相机和视觉检测相机,超声波雷达和超声波探伤传感器,以及智能控制器,在铁路轨道上运行的过程中,可及时对轨道,上障碍物、轨道的损伤进行检测与预警,通过伺服机械爪机构及时清除中小型障碍物,及时发现隐患位置,为巡查人员提供检修的依据,可极大地节约人工巡检的时间,大大提高工作效率与精确度。
- 还没有人留言评论。精彩留言会获得点赞!