一种基于LORA通讯的隧道掘进机电瓶车轨行区管理系统的制作方法
本发明涉及隧道施工的,尤其涉及一种基于lora通讯的隧道掘进机电瓶车轨行区管理系统。
背景技术:
1、目前在盾构施工中,隧洞物料水平运输常使用电瓶机车运输,电瓶机车运输过程中易发生失速、打滑、溜车等问题,轨行区风险高,难于管理。目前盾构电瓶车防溜车设施多为机械式,在溜车时,依靠人为判断,进行制动。现行轨行区管理多为人工判断,由司机及项目管理人员实施,当电瓶车自带刹车制动失效时,司机采取电瓶车紧急制动,通过勾爪轨道、岩壁、管片等方式减速电瓶车,通过对讲机等设备,通知设备上人员和施工管理人员,沟通效率低,且发现时制动装置可能已无法有效制动,容易造成较大安全事故。此种方式,成本较为低廉,但风险极高,事故发生时已无有效方法进行扼制。
2、近年来,出现了盾构防溜车装置的研究,如申请号201710575353.8的一种用于盾构施工的隧道内有轨运输电瓶车的防溜车装置,但其仅实现了局部区域提醒与溜车防撞,并未针对整条隧道设计防溜车系统,未实现全隧道轨行区管理。因此,设计一种隧道掘进机电瓶车轨行区管理系统,实现轨行区信息化、自动化管理。
3、申请号为202210645044.4的发明专利申请公开了一种用于盾构隧道电瓶车的预警系统和装置,其中,预警系统包括监测传感器子系统、数据传输子系统、数据处理子系统、安全预警子系统以及辅助支持子系统;监测传感器子系统,用于解算电瓶车的实时位置、测量电瓶车的实时速度和里程、采集行驶环境的实时图像;数据处理子系统,用于基于监测传感器子系统采集的数据确定电瓶车与洞口之间的实时距离,基于实时图像识别电瓶车周围是否存在障碍物和/或行人,并控制安全预警子系统对电瓶车的行驶状态进行显示和预警。该申请能够实现对电瓶车的定位、识别电瓶车行驶环境中的障碍物和行人,提示和预警电瓶车的行驶状态,降低电瓶车超速、视觉盲区的隐患,提高隧道作业的效率和安全性。
4、上述发明实现了隧道整体电瓶车定位,通过定位及图像提醒电瓶车司机是否超速或者注意人员碰撞,但上述系统仅仅从电瓶车司机处进行报警,还是依靠人员进行操作和制动,没有与电瓶车控制、道岔控制等系统结合在一起,形成综合性的管理系统,且该系统没有能从外部解决拦截溜车问题,没有对整条隧道进行报警,仅对司机进行提醒,安全性不够高,可能由于信息延迟,导致设备人员未能及时预防,事故危险性未能降低。综合性轨行区管理系统应在事故初始阶段,就自动进行拦截措施,通过外部手段,及时传递故障信息,使得人员有时间采取预防措施,减少事故危险性。
技术实现思路
1、针对现有的隧道防溜车系统不能实现全隧道轨行区自动化管理的技术问题,本发明提出一种基于lora通讯的隧道掘进机电瓶车轨行区管理系统,实现轨行区信息化、自动化管理,解决现有技术中隧道轨行区管理难度大、多为人工管理、难实现全隧道覆盖管理的问题。
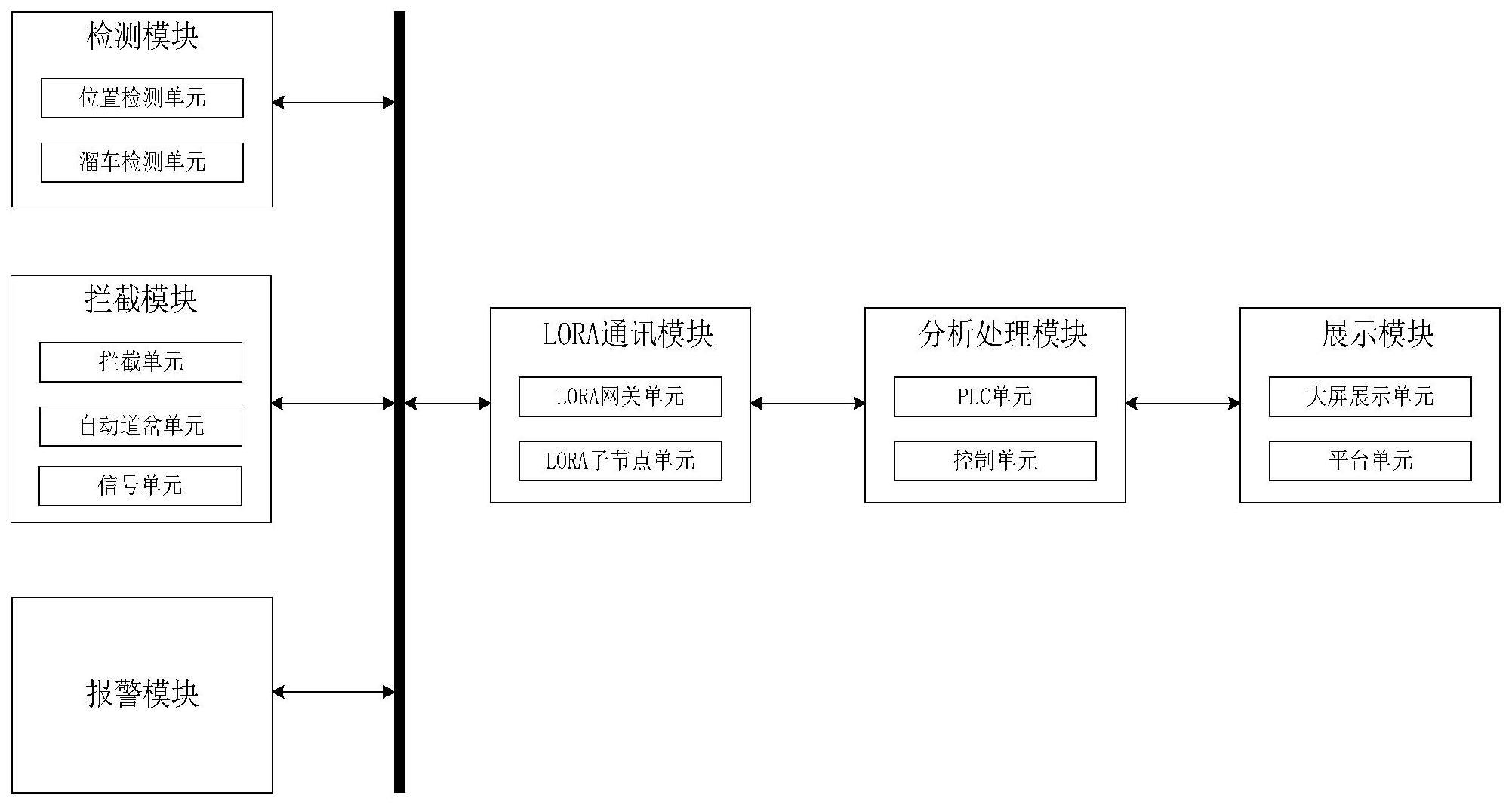
2、为了达到上述目的,本发明的技术方案是这样实现的:一种基于lora通讯的隧道掘进机电瓶车轨行区管理系统,包括检测模块、拦截模块、报警模块、lora通讯模块、分析处理模块和展示模块,检测模块、拦截模块、报警模块均通过总线与lora通讯模块相连接,lora通讯模块与分析处理模块相连接,分析处理模块与展示模块相连接。
3、优选地,所述lora通讯模块包括lora网关单元和lora通讯子节点,lora通讯子节点均匀设置在隧道内,检测模块、拦截模块、报警模块均与lora通讯子节点相连接,lora通讯子节点与lora网关单元通信连接,lora网关单元设置在隧道洞口的控制柜上,lora网关单元与控制柜内的分析处理模块相连接。
4、优选地,所述拦截模块包含拦截单元、自动道岔单元和信号单元,拦截单元、自动道岔单元和信号单元均通过lora通讯模块与分析处理模块的控制单元相连接;拦截单元安装在洞口位置处且对溜车、错道情况下的机车进行拦截;自动道岔单元用于自动根据机车进出情况通过电动转辙器转换道岔;信号单元提醒人员拦截单元和自动道岔单元的动作状态信息。
5、所述拦截单元包含电机、减速机和挡杆,电机与减速机相连接,减速机上设有挡杆;所述电机与控制柜的分析处理模块的控制单元相连接;所述信号单元包括交通信号灯,交通信号灯包括红灯、黄灯和绿灯,三色的交通信号灯安装在洞内50m处,用于提醒司机拦截单元的状态;红灯表示挡杆完全关闭或自动道岔单元的道岔动作错误,电瓶车应禁止通行;黄灯表示挡杆正在动作或自动道岔单元的道岔正在转换,电瓶车司机等待动作完成后通行;绿灯表示挡杆打开到位,道岔动作正确,可以正常通过;所述报警模块为声光报警器,声光报警器均匀设置在隧道内且声光报警器与lora通讯模块的lora通讯子节点相连接。
6、优选地,所述检测模块包含位置检测单元与溜车检测单元,位置检测单元均匀铺设在隧道内,用于检测电瓶车位置;所述溜车检测单元安装在电瓶机车上,用于检测机车速度与制动器状态,并将电瓶车运行信息发送至分析处理模块;所述检测单元与溜车检测单元均与lora通讯模块的lora通讯子节点相连接。
7、优选地,所述溜车检测单元包括转速监控传感器和刹车制动装置,转速监控传感器用于检测电瓶车的轮对旋转速度,刹车制动装置用于检测电瓶车刹车、变频器的运行状态,转速监控传感器和刹车制动装置均与plc控制器相连接,plc控制器与lora通讯子节点相连接;所述位置检测单元为红外测距装置,红外测距装置与lora通讯子节点相连接。
8、优选地,所述展示模块包括大屏展示单元和平台单元,用于将轨行区的拦截模块的信息、电瓶车运行信息、报警信息进行可视化展示;所述大屏展示单元为现场大屏,控制柜通过接入层交换机与现现场大屏相连接,平台单元包括解算服务器、异地集团上位机上位机、异地集团上位机,接入层交换机与核心交换机相连接,核心交换机分别与解算服务器、项目部上位机和无线网络相连接,无线网络与异地集团上位机相连接。
9、优选地,所述控制柜与接收器相连接,接收器与遥控器相连,用于接受遥控器信号,发送给控制柜中的处理器,可实现遥控控制;
10、分析处理模块包括控制单元,控制单元包含plc单元和继电器单元,plc单元与继电器单元相连接;所述lora网关单元中的lora接收模块通过电缆方式与plc单元相连接;
11、所述分析处理模块根据预先制定的规则,判断轨行区各模块动作是否正常即整体方式为:红外测距装置检测电瓶车位置信息,电瓶车的速度检测器检测电瓶车速度、刹车信息,拦截单元的挡杆动作到位信息,自动道岔单元动作到位的信息,通过电气连接或lora通讯方式统一传回至控制单元中的plc单元进行逻辑控制,分析处理后的数据发送至展示模块。
12、优选地,根据电瓶车运动位置,触发不同定时器,所述分析处理模块通过位置检测单元传回电瓶车运动数据,计算电瓶车区间速度vt与检测点通过速度vδt1;通过溜车检测单元检测车轮转动速度通过脉冲形式传回分析处理模块,分析处理模块计算电瓶车实时速度vδt2;
13、并实时计算区间速度vt、检测点通过速度vδt1和电瓶车实时速度vδt2;
14、判断计算区间速度vt或检测点通过速度vδt1或电瓶车实时速度vδt2中是否有速度大于设置预警速度vset的,如果有,判断溜车检测单元的刹车制动装置是否动作,若未动作,判定司机超速行驶,超速警报显示在展示模块,利用报警模块进行报警;若动作,判定司机进行紧急制动或溜车,向报警模块发出信号进行报警,plc单元启动拦截单元开始动作;
15、如果计算区间速度vt或检测点通过速度vδt1或电瓶车实时速度vδt2均未大于设置预警速度vset,则进入下一步骤;
16、判断检测点通过速度vδt1与电瓶车实时速度vδt2的差值δv的大小,若差值δv>0.5,则判定司机进行紧急制动或溜车,向报警模块发出信号进行报警,plc单元启动拦截单元开始动作;若0≤δv≤0.5,则判定电瓶车运行速度在正常范围内,正常通行;若δv<0,则判定检测模块存在差异,通知工作人员及时进行处理或校准;
17、所述区间速度vt=l/t,其中,l为相邻两个测量点之间的距离,t为通过相邻两个测量点之间时间;所述通过速度vδt1=δl/δt,其中,δl为电瓶车长度,δt为电瓶车通过测量点的时间;
18、所述实时速度:其中,p为检测周期t内检测车轮上的脉冲数,n为车轮旋转一周的脉冲数,r为车轮半径,t为检测周期,cδt为确定检测周期t、确定检测脉冲数n、确定车轮半径r后可化简为常数。
19、其工作流程为:s01.沿隧道内均匀分布位置检测单元,检测电瓶车实时位置信息;在电瓶车上布置溜车检测单元,检测电瓶车轮对运行速度、电瓶车刹车状态、变频器运行状态等信息;s02.检测模块的检测信息通过lora网关节点发送至洞口的控制柜上的lora网关单元接收,再传递给plc单元进行处理;s03.由plc单元按照事先设置好的逻辑,判断电瓶车是否出现溜车情况;s04.正常情况下,电瓶车行驶至拦截单元处,分析处理模块判断电瓶车运行行驶状态正常,控制拦截单元的挡杆打开,让其通行;s05.分析处理模块控制电动转辙器,指引机车进入正确轨道;s06.拦截单元关闭、电动转辙器错误动作时,交通信号灯为红色;动作过程中,交通信号灯为黄色;当拦截单元打开到位时、转辙器动作到位时,信号灯显示为绿色,提醒人员机车可安全通过;s07.机车顺利通过拦截单元后,拦截单元自动关闭,系统复位,等待下次流程;s08.当分析处理模块判断机车溜车情况时,控制拦截单元关闭挡杆,阻拦溜车;s09.所有信号灯显示为红灯,禁止通行;s10控制柜内plc单元通过lora网关发送动作信息至各lora通讯子节点,控制隧道内各声光报警器发出警报,提醒隧洞内人员,机车发生溜车情况,紧急避险;s11.分析处理模块发送信息至检测模块,控制机车内部继电器动作,带动机车的自动刹车装置及自带防溜车装置动作,进行紧急制动;s11.分析处理模块判断机车拦截制动情况,若还在拦截中,机车还在高速运动中,则重复步骤s08-s11;s12.若拦截完成,机车静止,则整机复位,结束流程,等待管理人员判断情况。
20、与现有技术相比,本发明的有益效果:解决了现有防溜车系统仅仅依靠人为判断,人工操作风险大,未从多维度管理轨行区的问题。本发明可自动判断电瓶车运行情况,自动控制制动、转辙、拦截及报警,实现检测、制动、换道、报警、展示等功能,实现立体、综合式轨行区综合管理,提高施工现场电瓶车轨行区安全性,提高现场安全管理能力,减少因安全事故停工的情况,从而实现施工效率提升。
- 还没有人留言评论。精彩留言会获得点赞!