一种车地协同感知移动授权计算方法与流程
本发明涉及轨道列车信号控制,特别涉及一种车地协同感知移动授权计算方法。
背景技术:
1、现有基于通信的列车运行控制系统(communication based train control,cbtc)中,列车运行的级别最高为:无线连续式通信控制下列车自动保护系统(auto移动授权tictrain protection,atp)或列车自动驾驶系统(auto移动授权tic train operation,ato)下运行,简称cbtc级别。在此级别下,atp通过无线通信获得移动授权,车载控制器(vehicle on-board controller,vobc)控制列车在cm/am/fam模式下运行。当列车前方突然发生紧急情况,列车无法及时的做出响应,严重时危及行车安全。
2、随着列车控制系统的不断更新换代,最新的自主虚拟编组运行系统(autonomousvirtual coupling operation system,avcos),是基于多传感器及智能分析技术,使列车具备自主环境感知和决策能力,形成列车的鹰眼系统(intelligent traineyes,ite)。
3、鹰眼系统ite通过对列车运行周边环境的全方位“观察和感知”,实现异物侵限、路权开放、信号系统降级等全场景覆盖并持续输出用于车辆控制和科学决策的感知结果,最大限度确保列车的行车安全并提升轨道交通线网运行安全和效率,该系统成功实现了国际最高安全等级sil4(safety integrity level 4)级的列车自主高安全定位、高安全障碍物检测等功能。
4、移动授权是列车行车和安全防护的重要依据,移动授权指导列车按照给定的运行方向、给定的限制速度安全的运行通过的轨道区段,通过移动授权实现保持列车运行间隔,为列车提供安全防护功能。
5、目前无论是传统的cbtc系统还是基于车车通信的cbtc系统,都必须依赖各设备之间的通信获取线路信息或前方列车信息,用来进行移动授权的计算。系统之间交互信息较多,增加了系统的复杂度,同时信息传输存在延迟,降低了系统的实时性,限制了列车的灵活运行控制。
6、因此,基于列车上avocs系统增加鹰眼系统,提出一种车地协同感知移动授权计算方法。
技术实现思路
1、本发明的目的在于:提供了一种车地协同感知移动授权计算方法,在车地无线正常时,avcos系统通过地面感知设备提前识别列车前方可能存在的障碍物,使列车能提前预防前方发生的危险,及时做出对应处理,从而保证行车的安全,保障人民群众安全。
2、为实现上述目的,本发明提供一种车地协同感知移动授权计算方法,包括步骤:
3、列车完成定位并与需要通信的对象控制器oc建立通信后,周期获取列车最大安全车头前方星链tsl的通信范围内link序列中星链tsl的id,向前方的星链tsl同时发起建链;
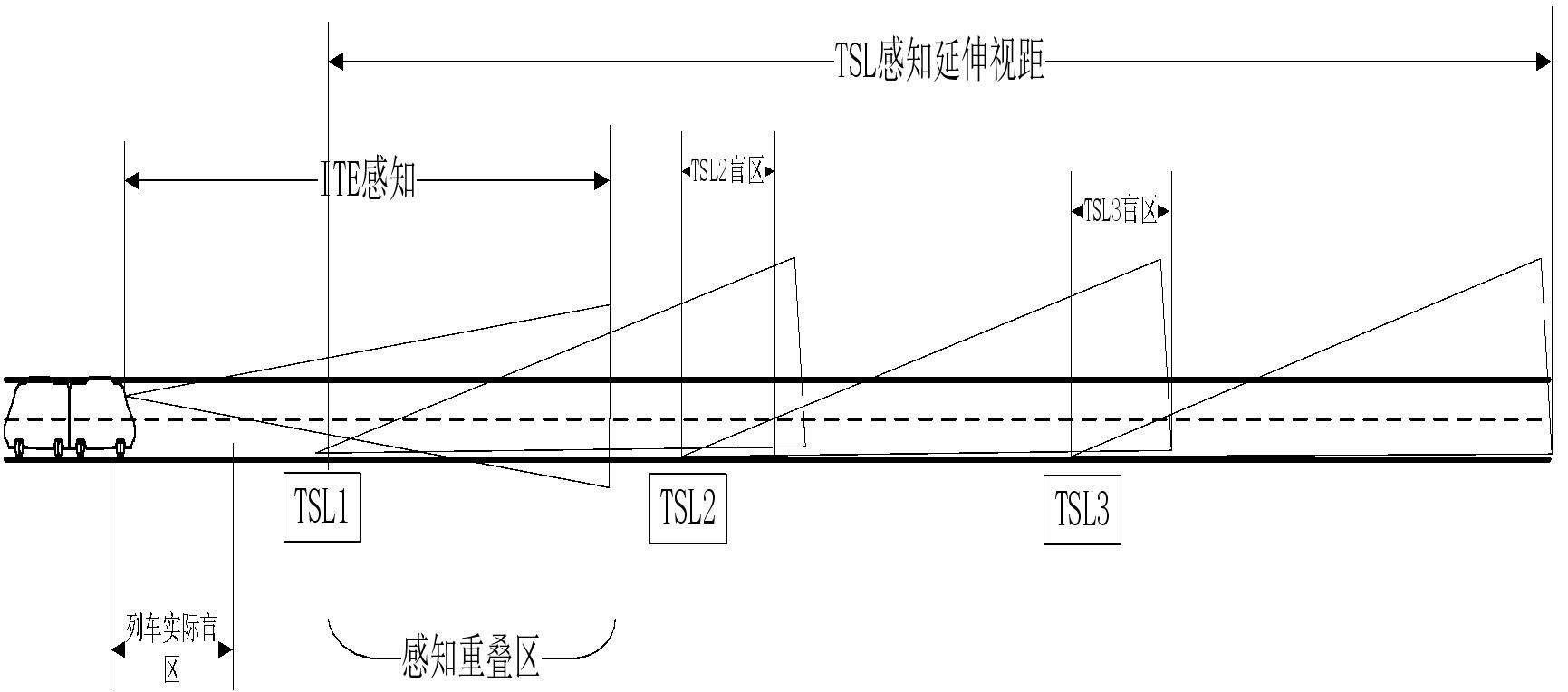
4、查找鹰眼系统ite感知视距终点所在星链tsl的id,鹰眼系统ite与星链tsl视距拼接,视距连续延伸;
5、列车获取鹰眼系统ite以及通信星链tsl范围内所有的障碍物信息,比较列车位置与星链tsl发送的障碍物位置,认定障碍物是否为列车本身;
6、从列车的非安全车头开始计算星链tsl的感知识别点以及感知识别状态;
7、根据感知识别点进行星链tsl移动授权计算,根据感知识别状态进行星链tsl移动授权计算。
8、进一步的,所述鹰眼系统ite与星链tsl视距拼接,视距连续延伸,具体为:
9、所述星链tsl的正向视距或反向视距与鹰眼系统ite感知视距有重叠区域,则判断该星链tsl视距连续,继续查找下一个星链tsl判断视距是否连续延伸;
10、所述星链tsl的反向视距与鹰眼系统ite感知视距没有重叠区域,且不连续区域小于线路上最小车长时,判断视距连续延伸;反之,不连续区域大于等于线路上最小车长时,判断视距不连续,并根据鹰眼系统ite感知视距和星链tsl1沿列车运行方向的视距终点取长作为列车的感知视距终点向前运行。
11、进一步的,所述列车获取鹰眼系统ite以及通信星链tsl范围内所有的障碍物信息,比较列车位置与星链tsl发送的障碍物位置,具体为:
12、当列车处于停车或者向前运行的情况,星链tsl发过来的障碍物位置在本车当周期的安全位置包络内;当列车处于退行时,星链tsl发过来的障碍物位置可能在列车目前位置的前方;
13、根据延迟时间计算误差范围,若星链tsl发送的障碍物位置和本车安全车头在该误差范围内,则认为该障碍物是本车,否则为其他的障碍物;
14、所述障碍物不是列车本身,为其他障碍物时,需查询下一个通信星链tsl范围内的障碍物位置。
15、进一步的,所述误差范围的计算方式如下:
16、延迟时间t1 = (收到星链tsl障碍物信息的itp周期号-星链tsl信息gal包头中itp的周期号)*itp周期运行时间+星链tsl区域状态信息中的通信延时;
17、误差范围s = v0*t1 + 10m+ 星链tsl区域信息中障碍物的测距误差+定位误差;
18、其中,v0为列车收到障碍物信息时的列车速度,10m为考虑t1时间内加减速以及取v0为平均速度带来的误差。
19、进一步的,所述从列车的非安全车头开始计算星链tsl的感知识别点以及感知识别状态,具体为:
20、若最终星链tsl延伸视距大于感知识别最大范围,且范围内无障碍物时,则将感知识别范围边界作为感知识别点,感知识别成功;
21、若星链tsl延伸视距内存在障碍物时,则从障碍物位置回撤障碍物测距误差作为感知识别点,感知识别成功;
22、若由于星链tsl视距无法连续,导致星链tsl延伸视距小于感知识别最大范围时,则将沿列车运行方向不连续边界点作为感知识别点,感知识别中;
23、当星链tsl延伸视距范围内存在不满足拓扑关系的道岔,且岔前无障碍物,那么视距不能越过该道岔,将岔尖作为感知识别点,感知识别中;
24、当星链tsl延伸视距不连续区域大于等于线路配置最小车长且鹰眼系统ite视距超过星链tsl视距后,星链tsl感知识别失败;
25、当鹰眼系统ite视距越过最后一个通信星链tsl的正向最大可视距离时,星链tsl感知识别失败。
26、进一步的,所述根据感知识别状态进行星链tsl移动授权计算,具体为:
27、星链tsl感知识别成功或者星链tsl感知识别中,星链tsl移动授权不可越过感知识别点回撤两车同向追踪的防护距离。
28、进一步的,所述根据感知识别点进行星链tsl移动授权计算,具体为:
29、若星链tsl感知识别点处于站台或者休眠唤醒轨区域,则星链tsl移动授权终点不可越过基于星链tsl感知识别点回撤站台追踪距离的防护点;
30、若星链tsl感知识别点不处于站台或者休眠唤醒轨区域时,但从星链tsl感知识别点向前查找站台追踪距离的位置处于站台或者休眠唤醒轨区域时,则星链tsl移动授权终点不可越过基于站台端点或者休眠唤醒轨端点回撤站台追踪距离的防护点。
31、本发明的有益效果如下:
32、本发明是一种车地协同感知移动授权计算方法,avocs系统增加鹰眼系统ite并将其安装在车头,通过雷达等设备对前方是否存在障碍物进行检测识别,同时新增地面感知设备星链tsl,通过净空检测的方式来检测一定区域内的感知识别,实时延伸视距,提前预知列车前方的道路情况,提前预防前方发生的危险,及时做出对应处理,从而保证行车的安全,保障人民群众安全,具有重要的工程价值。
- 还没有人留言评论。精彩留言会获得点赞!