一种列车打滑防护的控制方法、装置、设备及介质与流程
本发明涉及列车信号控制系统,尤其是涉及一种列车打滑防护的控制方法、装置、设备及介质。
背景技术:
1、在轮轨导向的轨道交通中,车辆的制动方式是靠轮轨间的制动力来实现,由于受到轮轨间黏着系数的限制,当车辆制动力超过轮轨黏着力时,车轮与轨面之间就会发生滑行,通常称之为打滑。
2、列车运营时的环境和人为条件是复杂多变的,轨道(特别是露天和高架区段)粘着系数也会随着雨雪天气、温湿度、车辆喷油、轨面污染和弯道曲度等因素变化而变化,制动时易出现车辆打滑,目前的打滑防护研究主要集中在打滑预防研究和出现打滑事实后进入预设好的雨雪模式,是针对特定环境下,发生打滑事实后,采取对后续运营列车打滑模型进行调整,降低其出现打滑的概率,在环境条件变化后,并未改善打滑事实首次出现的概率。
3、城市轨道交通的车辆普遍不设置自由轴,信号系统(atc)的测速装置一般安装在制动轴上,在出现制动打滑事实后,使得列车实际速度将严重偏离信号系统预期的速度曲线,经常性会发生列车停车冲标和列车失位,对其它列车追踪和线路运营造成严重影响,有时甚至会造成运营中断,降低了城市轨道交通运营服务质量。
4、经过检索中国专利公开号cn110271521a公开了一种基于信号系统的列车防滑控制方法,具体公开了检测列车运行前方的挡风玻璃上的雨量信息,获得单列车的雨量数据;根据每个轨道区段内多个列车上报的雨量数据,采用卡尔曼滤波方法为每个轨道区段独立计算轨道湿滑状态;根据列车当前的打滑状态、列车常用制动率以及列车所处轨道区段的轨道湿滑状态,预测列车在当前轨道区段以及前方轨道区段的可实现制动率;根据预测列车可实现制动率更新信号系统的ato列车速度参考曲线。但是对打滑防护,尤其是通过项目配置对打滑事实进行一定的容忍从而实现打滑管理并未涉及。
5、因此如何来在不影响安全的情况下,对打滑事实设置一定的容忍,降低列车打滑对运营的影响,成为需要解决的技术问题。
技术实现思路
1、本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种列车打滑防护的控制方法、装置、设备及介质。
2、本发明的目的可以通过以下技术方案来实现:
3、根据本发明的第一方面,提供了一种列车打滑防护的控制方法,该方法通过信号系统对列车制动过程实时监测,自动识别列车进入打滑状态并进行位移打滑补偿,在列车处于打滑状态的持续时间超过设定阈值时,对列车进行失位处理并输出紧急制动停车。
4、作为优选的技术方案,该方法具体包括以下步骤:
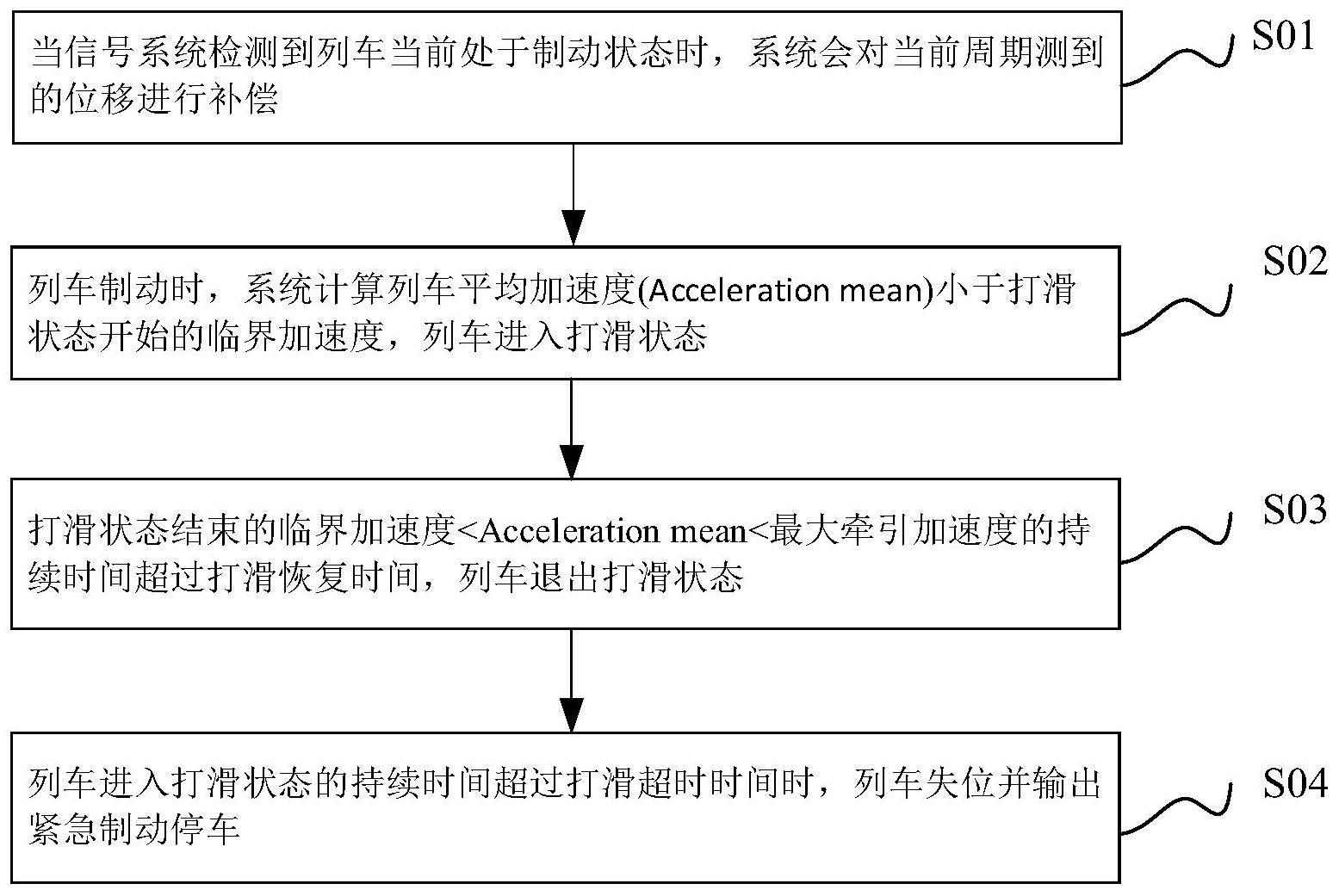
5、步骤s1,当信号系统检测到列车处于制动状态时,对当前周期测到的位移进行补偿;
6、步骤s2,信号系统判断列车是否进入打滑状态,若为是,执行步骤s3,否则继续执行步骤s2;
7、步骤s3,判断列车处于打滑状态的持续时间是否小于打滑超时时间,若为是,执行步骤s4,否则执行步骤s5;
8、步骤s4,判断列车是否满足打滑状态退出条件,若满足,列车退出打滑状态,否则返回步骤s3;
9、步骤s5,信号系统判断为列车打滑超时,认为该列车严重故障,对故障列车进行失位处理并输出紧急制动停车。
10、作为优选的技术方案,所述步骤s1中的补偿,用于确保在列车制动过程中,即使出现打滑后保证列车位置不会超出系统预估的位移范围。
11、作为优选的技术方案,所述步骤s1中的补偿方式具体为:
12、当前周期系统软件使用的位移=当前周期里程计测到的位移×(1+车辆参数中的最大打滑率)。
13、作为优选的技术方案,所述列车实际向前运行的距离除以里程计所在车轮的外周转过的距离,小于(1+车辆最大打滑率)。
14、作为优选的技术方案,所述步骤s2中的信号系统判断列车是否进入打滑状态,具体为:
15、若信号系统计算的平均加速度小于打滑状态开始的临界加速度时,则认定列车进入打滑状态,其中平均加速度为本周期的加速度和上周期加速度的平均值。
16、作为优选的技术方案,所述步骤s4中的打滑状态退出条件具体为:
17、列车稳定打滑状态的持续时间大于打滑恢复时间,其中列车稳定打滑状态的条件为:打滑状态结束的临界加速度<系统计算的平均加速度<列车在线路上可以达到的最大牵引加速度。
18、作为优选的技术方案,所述打滑状态开始的临界加速度、打滑状态结束的临界加速度、打滑恢复时间和打滑超时时间为项目所用车辆经验值。
19、作为优选的技术方案,所述打滑状态开始的临界加速度、打滑状态结束的临界加速度、打滑超时时间和打滑恢复时间均根据线路情况和车辆性能进行配置。
20、作为优选的技术方案,该方法在日常运营停车点后方布置有停车信标,在列车接近停车点时进行列车重新定位。
21、根据本发明的第二方面,提供了一种用于所述列车打滑防护的控制方法的装置,包括:
22、位移补偿模块,用于当信号系统检测到列车处于制动状态时,对当前周期测到的位移进行补偿;
23、打滑状态判断模块,用于信号系统判断列车是否进入打滑状态;
24、打滑状态持续时间判断模块,用于判断列车处于打滑状态的持续时间是否小于打滑超时时间;
25、打滑状态退出条件判断模块,用于判断列车是否满足打滑状态退出条件
26、列车打滑超时处理模块,用于信号系统判断为列车打滑超时,认为该列车严重故障,对故障列车进行失位处理并输出紧急制动停车。
27、根据本发明的第三方面,提供了一种电子设备,包括存储器和处理器,所述存储器上存储有计算机程序,所述处理器执行所述程序时实现所述的方法。
28、根据本发明的第四方面,提供了一种计算机可读存储介质,其上存储有计算机程序,所述程序被处理器执行时实现所述的方法。
29、与现有技术相比,本发明具有以下优点:
30、1)本发明实现了信号系统对制动过程实时监督,在不影响安全的情况下,对打滑事实进行一定的容忍,降低了列车打滑对运营的影响,同时也保障了运营安全;
31、2)本发明设计了车辆最大打滑率、打滑状态开始的临界加速度、打滑状态结束的临界加速度和打滑恢复时间,进一步降低了列车打滑对运营的影响;
32、3)本发明通过对制动状态列车按车辆最大打滑率进行位移补偿,实现了系统对列车正确追踪,保障了运营安全;
33、4)本发明设计了打滑超时时间,当打滑状态持续时间超过打滑超时时间,即超出了系统的设计性能范围,系统将对打滑列车执行失位处理,实现了打滑列车和后续追踪列车的安全追踪处理,进一步保证了行车安全;
34、5)本发明在日常运营停车点后方设计了精确定位信标,降低了列车停车冲标的概率。
技术特征:
1.一种列车打滑防护的控制方法,其特征在于,该方法通过信号系统对列车制动过程实时监测,自动识别列车进入打滑状态并进行位移打滑补偿,在列车处于打滑状态的持续时间超过设定阈值时,对列车进行失位处理并输出紧急制动停车。
2.根据权利要求1所述的一种列车打滑防护的控制方法,其特征在于,该方法具体包括以下步骤:
3.根据权利要求2所述的一种列车打滑防护的控制方法,其特征在于,所述步骤s1中的补偿,用于确保在列车制动过程中,即使出现打滑后保证列车位置不会超出系统预估的位移范围。
4.根据权利要求2所述的一种列车打滑防护的控制方法,其特征在于,所述步骤s1中的补偿方式具体为:
5.根据权利要求4所述的一种列车打滑防护的控制方法,其特征在于,所述列车实际向前运行的距离除以里程计所在车轮的外周转过的距离,小于(1+车辆最大打滑率)。
6.根据权利要求2所述的一种列车打滑防护的控制方法,其特征在于,所述步骤s2中的信号系统判断列车是否进入打滑状态,具体为:
7.根据权利要求6所述的一种列车打滑防护的控制方法,其特征在于,所述步骤s4中的打滑状态退出条件具体为:
8.根据权利要求7所述的一种列车打滑防护的控制方法,其特征在于,所述打滑状态开始的临界加速度、打滑状态结束的临界加速度和打滑恢复时间为项目所用车辆经验值。
9.根据权利要求7所述的一种列车打滑防护的控制方法,其特征在于,所述打滑状态开始的临界加速度、打滑状态结束的临界加速度、打滑超时时间和打滑恢复时间均根据线路情况和车辆性能进行配置。
10.根据权利要求1所述的一种列车打滑防护的控制方法,其特征在于,该方法在日常运营停车点后方布置有停车信标,在列车接近停车点时进行列车重新定位。
11.一种用于权利要求1-10任一所述列车打滑防护的控制方法的装置,其特征在于,包括:
12.一种电子设备,包括存储器和处理器,所述存储器上存储有计算机程序,其特征在于,所述处理器执行所述程序时实现如权利要求1~10中任一项所述的方法。
13.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述程序被处理器执行时实现如权利要求1~10中任一项所述的方法。
技术总结
本发明涉及一种列车打滑防护的控制方法、装置、设备及介质,该方法通过信号系统对列车制动过程实时监测,自动识别列车进入打滑状态并进行位移打滑补偿,在列车处于打滑状态的持续时间超过设定阈值时,对列车进行失位处理并输出紧急制动停车。与现有技术相比,本发明具有降低了列车打滑对运营的影响,同时也保障了运营安全等优点。
技术研发人员:胡荣华,王亚男,王晓燕,徐烨,刘德伟,潘亮
受保护的技术使用者:卡斯柯信号有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!