一种钢轨廓形配准方法、装置、设备及存储介质与流程
本发明涉及轨道动态测量,特别涉及一种钢轨廓形配准方法、装置、设备及存储介质。
背景技术:
1、轨道是支撑列车运行的重要基础设施,高效检测轨道状态,对确保铁路安全运营至关重要。目前,基于激光位移传感器的非接触式检测技术被广泛应用于轨道检测系统中,实现了轨道的连续动态测量,采用轨道轮廓数据与标准廓形数据对比获得实际轨道的一些特征参数,借助数值计算的方法便可获得实际轨道的一些几何不平顺状态。因此,如何将实测轨道轮廓与标准轨道轮廓进行高精度自动匹配,是轨道几何参数高精度动态检测面临的关键问题。
2、现有技术中,基于数据集直接匹配的方法,利用icp(iterative closest point,最近点迭代算法)算法计算出最佳旋转平移方式,但是这种方法计算量较大,处理速度慢,并且受测量中产生的噪点及油污点的影响较大,容易产生局部最优解,在对实时性要求较高的测量中不易实现;现有技术中还基于静态模板进行特征点匹配,定位的精度取决于拟合曲线的精度,易受离群点、测量误差点的影响。
技术实现思路
1、有鉴于此,本发明的目的在于提供一种钢轨廓形配准方法、装置、设备及介质,能够实现实测钢轨廓形与标准钢轨廓形的快速、准确配准,大大提高了轨道动态检测中钢轨廓形配准的效率。其具体方案如下:
2、第一方面,本技术公开了一种钢轨廓形配准方法,包括:
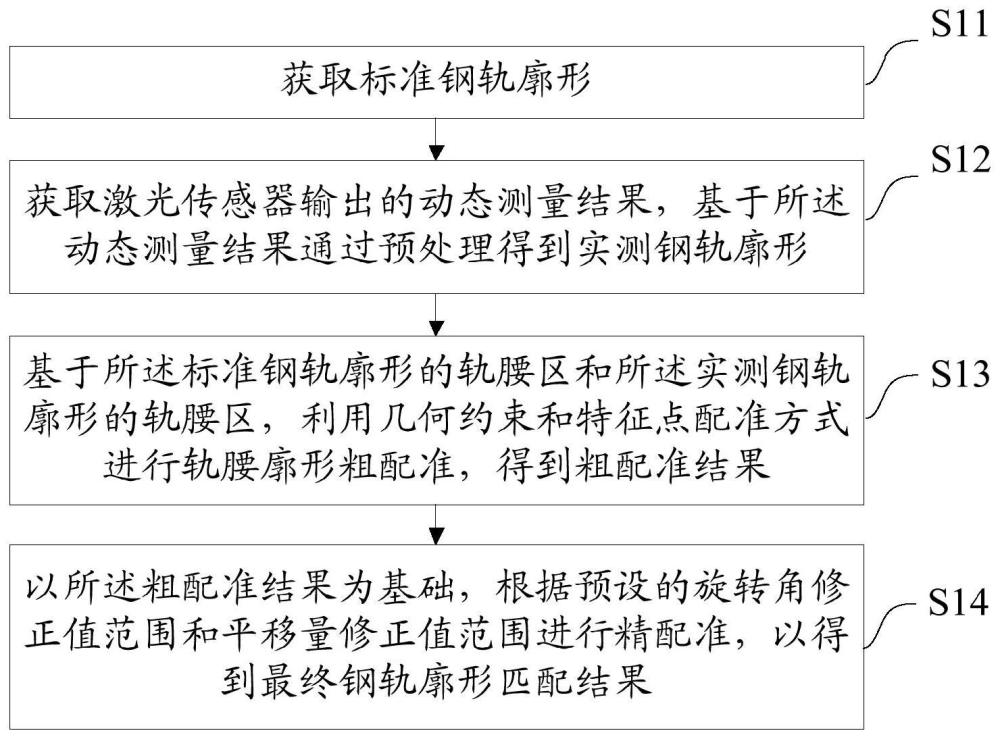
3、获取标准钢轨廓形;
4、获取激光传感器输出的动态测量结果,基于所述动态测量结果通过预处理得到实测钢轨廓形;
5、基于所述标准钢轨廓形的轨腰区和所述实测钢轨廓形的轨腰区,利用几何约束和特征点配准方式进行轨腰廓形粗配准,得到粗配准结果;
6、以所述粗配准结果为基础,根据预设的旋转角修正值范围和平移量修正值范围进行精配准,以得到最终钢轨廓形匹配结果。
7、可选的,所述获取激光传感器输出的动态测量结果,基于所述动态测量结果通过预处理得到实测钢轨廓形,包括:
8、基于所述动态测量结果得到初始实测钢轨廓形,对所述初始实测钢轨廓形进行去重,得到去重后实测钢轨廓形;
9、根据去重后实测钢轨廓形中相邻两点之间的距离与预设距离阈值的大小关系,确定廓形断裂的起始点和终止点,根据所述起止点和所述终止点的密度确定出目标断裂区间;
10、根据目标断裂区间进行分割得到轨头区和初始轨腰区,从所述初始轨腰区中提取出轨腰区,以得到所述实测钢轨廓形。
11、可选的,所述从所述初始轨腰区中提取出轨腰区,包括:
12、根据轨头区斜率为负的廓形拟合得到目标直线;
13、根据所述目标直线对所述初始轨腰区的划分,得到轨腰区和噪点区。
14、可选的,所述获取标准钢轨廓形,包括:
15、根据标准钢轨廓形的曲率,将标准钢轨廓形分为大曲率区间和小曲率区间;
16、利用小步长从所述大曲率区间的廓形中提取出离散点,利用大步长从所述小曲率区间的廓形中提取出离散点。
17、可选的,所述基于所述标准钢轨廓形的轨腰区和所述实测钢轨廓形的轨腰区,利用几何约束和特征点配准方式进行轨腰廓形粗配准之前,还包括:
18、对所述标准钢轨廓形的轨腰区进行区域分割,得到多个目标区域廓形;
19、以钢轨轨底中心为原点建立坐标系,根据所述坐标系确定每个所述目标区域廓形对应的函数表达。
20、可选的,所述利用几何约束和特征点配准方式进行轨腰廓形粗配准之前,还包括:
21、根据所述实测钢轨廓形的轨腰区的两个端点建立端点连线,根据所述轨腰区上各点到所述端点连线的距离筛选出最远点;
22、根据所述最远点到所述端点连线的最远距离与比例系数的乘积,得到目标距离;
23、通过平移所述端点连线,得到与所述最远点的垂直距离为所述目标距离的目标连线;
24、将所述目标连线与所述轨腰区相交的两个端点以及所述最远点作为所述配准特征点。
25、可选的,所述利用几何约束和特征点配准方式进行轨腰廓形粗配准,得到粗配准结果,包括:
26、根据轨腰的几何特征从所述配准特征点中筛选出靠近轨底的配准特征点作为第一配准特征点,另一个作为第二配准特征点;
27、将所述第一配准特征点与所述实测钢轨廓形的轨腰区的离散点进行对齐重合;
28、重合后以所述第一配准特征点为圆心,以所述第一配准特征点到所述第二配准特征点的直线距离为半径构建第一圆方程,将所述第一圆方程与所述目标区域廓形对应的函数表达的交点作为第三目标点;
29、以所述第一配准特征点为圆心,以所述第一配准特征点到所述最远点的直线距离为半径构建第二圆方程,将所述第二圆方程与所述目标区域廓形对应的函数表达的交点作为第四目标点;
30、以所述第一配准特征点、所述第二配准特征点和所述最远点为所述实测钢轨廓形的配准特征点,以所述第一配准特征点、所述第三目标点和所述第四目标点作为所述标准钢轨廓形的配准特征点;
31、确定所述第四目标点到所述第一配准特征点与所述第三目标点构成的直线的实际垂直距离;
32、比较所述目标距离和所述实际垂直距离的差值;
33、若所述差值小于预设阈值,则确定从所述实测钢轨廓形的配准特征点到所述标准钢轨廓形的配准特征点的最佳的旋转矩阵和平移矩阵,并计算旋转平移后的配准误差;
34、通过将所述第一配准特征点与所述实测钢轨廓形的轨腰区的各个离散点进行对齐重合后,得到配准误差集合;
35、从所述配准误差集合中筛选出最小误差,并根据所述最小误差对应的各配准特征点的位置以及旋转矩阵和平移矩阵,将所述实测钢轨廓形进行坐标系转换,得到粗配准结果。
36、第二方面,本技术公开了一种钢轨廓形配准装置,包括:
37、标准钢轨廓形获取模块,用于获取标准钢轨廓形;
38、实测钢轨廓形获取模块,用于获取激光传感器输出的动态测量结果,基于所述动态测量结果通过预处理得到实测钢轨廓形;
39、粗配准模块,用于基于所述标准钢轨廓形的轨腰区和所述实测钢轨廓形的轨腰区,利用几何约束和特征点配准方式进行轨腰廓形粗配准,得到粗配准结果;
40、精匹配模块,用于以所述粗配准结果为基础,根据预设的旋转角修正值范围和平移量修正值范围进行精配准,以得到最终钢轨廓形匹配结果。
41、第三方面,本技术公开了一种电子设备,包括:
42、存储器,用于保存计算机程序;
43、处理器,用于执行所述计算机程序,以实现前述的钢轨廓形配准方法。
44、第四方面,本技术公开了一种计算机可读存储介质,用于存储计算机程序;其中计算机程序被处理器执行时实现前述的钢轨廓形配准方法。
45、本技术中,获取标准钢轨廓形;获取激光传感器输出的动态测量结果,基于所述动态测量结果通过预处理得到实测钢轨廓形;基于所述标准钢轨廓形的轨腰区和所述实测钢轨廓形的轨腰区,利用几何约束和特征点配准方式进行轨腰廓形粗配准,得到粗配准结果;以所述粗配准结果为基础,根据预设的旋转角修正值范围和平移量修正值范围进行精配准,以得到最终钢轨廓形匹配结果。可见,通过选择不与车轮直接接触的轨腰部分作为配准区域,利用几何关系约束全局对实测钢轨廓形和标准钢轨轮廓进行粗配准,然后以粗配准结果为基础,在预设的旋转角修正值范围和平移量修正值范围内进行微调,得到最优的刚体变换关系,从而实现实测钢轨廓形与标准钢轨廓形的快速、准确配准,大大提高了轨道动态检测中钢轨廓形配准的效率。
- 还没有人留言评论。精彩留言会获得点赞!