一种基于Slam的电务LKJ数据定测机器人的制作方法
本发明涉及铁路电务lkj基础数据定测,具体为一种基于slam的电务lkj数据定测机器人。
背景技术:
1、lkj基础数据是控制行车的重要数据,其准确性是监控列车安全运行的前提和保证,数据不能存在任何问题,否则将会造成轻者停车,重者冒进信号,超速行驶等严重行车事故。电务lkj基础数据,包括全线信号机位置、轨道区段长度、应答器位置、分相区位置等基础数据的测量、复核、审查,一般使用测距小独轮推车进行人工测量,钢尺作为验证工具和辅助工具。测量精度受测量工具和人员操作影响很大,初测和复测数据往往有较大误差,造成多次重复测量。而在数据编制阶段,因测量数据整理全靠技术人员手工输入,人为造成数据错误;同时也需要人工做大量数据计算,经常出现计算错误。
2、因此,本领域技术人员提供了一种基于slam的电务lkj数据定测机器人,以解决上述背景技术中提出的问题。
技术实现思路
1、本发明的目的在于提供一种基于slam的电务lkj数据定测机器人,提高了数据测量准确度并减少或避免重复测量工作,实现电务lkj现场测量数据准确完整,高精度定测的自动化和智能化。
2、为实现上述目的,本发明提供如下技术方案:
3、一种基于slam的电务lkj数据定测机器人,包括机器人小车装置、rtk差分实时定位系统和pc终端组成;rtk差分实时定位系统包括rtk实时定位系统基准站和rtk实时定位系统监测站,rtk差分实时定位系统安装在机器人小车装置上。
4、rtk差分实时定位系统基准站和监测站之间通信采用无线4g/5g模块。机器人小车装置和pc终端之间采用无线4g/5g模块。
5、机器人小车装置安装定测机器人系统的硬件设备,组成硬件平台。由车轮、底盘、电机、左侧激光雷达、右侧激光雷达、左侧相机、右侧相机、超声波传感器、轮速计编码器、imu惯导单元、rtk实时定位监测站支架、rtk实时定位监测站、底盘驱动控制器、底盘驱动控制器电池、主控制器、主控制器电池、小车操作终端组成。
6、底盘上安装电机,电机上安装车轮,车轮设计成轨道车轮形状,每对车轮间距与车轨同宽,行进在车轨上;
7、车轮上安装轮速计编码器,根据车轮转动次数计算里程。
8、底盘左侧安装激光雷达和深度相机,用于进行小车左侧场景三维建图。
9、底盘右侧安装激光雷达和深度相机,用于进行小车右侧场景三维建图。
10、底盘中间前方安装超声波传感器,用于感知前方障碍物。
11、底盘中间安装imu惯导单元(陀螺仪和加速度计),用于感知小车姿态。
12、底盘中间后方安装rtk实时定位监测站支架,在支架上方安装rtk实时定位监测站,rtk实时定位监测站与rtk实时定位基准站组成gnss差分定位系统。
13、底盘左侧安装底盘驱动控制器,底盘驱动控制器通过pwm信号控制线与电机相连,通过pwm方式调整电机转速,驱动小车行走并控制小车行进速度。电机上同时安装有轮速计编码器,底盘驱动控制器通过io控制线与轮速计编码器相连,计数车轮转动次数计算里程。底盘驱动控制器还通过串口与imu惯导单元连接,获取小车的姿态信息。底盘驱动控制器还通过以太网接口与主控制器连接,将采集到的里程信息和姿态信息传送给主控制器,并从主控制器接收信息控制电机转动。
14、底盘右侧安装主控制器,主控制器通过usb信号控制线与左侧激光雷达、右侧激光雷达、左侧深度相机、右侧深度相机、前端超声波传感器相连,通过串口连接rtk实时定位监测站。
15、底盘上安装两个电池,分别为底盘驱动控制器和主控制器供电。
16、底盘中间下侧安装操作终端,操作终端采用笔记本电脑、平板等智能移动设备,通过网线与主控制器通信。
17、rtk实时差分定位系统包括基准站和监测站。采用的rtk实时差分定位系统,支持北斗/gps/glonass/galileo卫星信号,基准站用于基线解算基准,监测站放在位移点上,接收卫星信号,通过与基准站相对定位可测得厘米级定位精度的位置信息,rtk实时定位基准站将接收到的卫星信号通过无线传输通道实时发给监测站,监测站将接收到的卫星信号和接收到基准站信号实时联合解算,求得基准站和流动站间坐标增量(基线向量),解算出坐标及高程,平面解算精度达到1cm。基准站和监测站之间通信采用无线4g/5g模块。
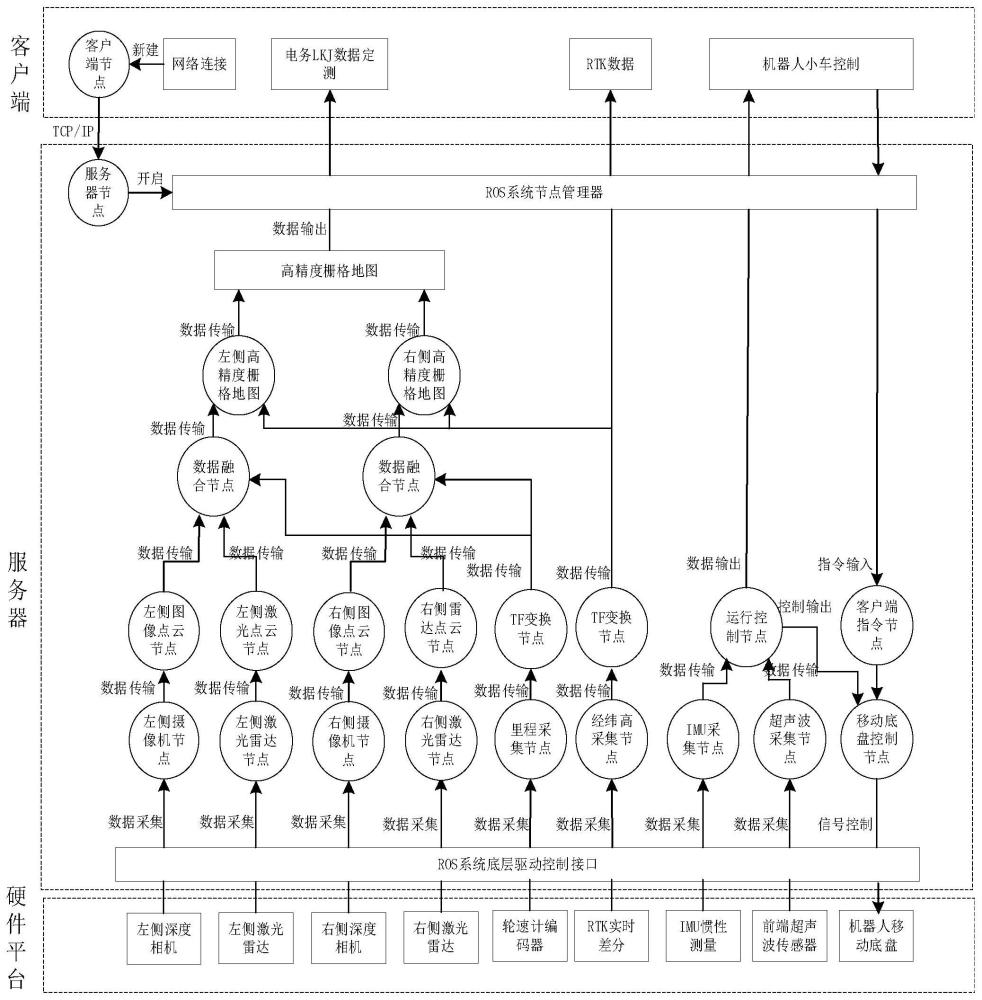
18、机器人小车装置的主控制器搭载ros操作系统,主控制器和小车操作终端以tcp/ip协议通信,主控制器作为服务器端,操作终端作为客户端。服务器端接收客户端的指令,分析处理指令,指示硬件设备实施相应的操作,对硬件传感器采集到的数据进行算法计算处理,给客户端返回结果。客户端负责进行人机交互和数据可视化显示。客户端、服务器端、硬件设备三个部分通过接口进行相互通信,以协同实现目标功能。
19、主控制器搭载ros操作系统,ros操作系统通信机制采用节点、话题与消息机制,通过发布和订阅话题,节点可以在ros中进行通信,并交换消息数据。本系统设计了若干节点,每个节点是执行一项具体的任务、独立运行的可执行文件。
20、左侧摄像机节点读取左侧深度相机的图像信息和深度信息传输给左侧图像点云节点,左侧图像点云节点生成三维图像,左侧激光雷达节点读取激光雷达距离信息传输给左侧激光点云节点,左侧激光点云节点形成激光点云图,左侧三维图像和左侧激光点云通过数据融合节点形成左侧高精度栅格地图输出。
21、右侧高精度栅格地图输出同理。
22、里程采集节点读取轮速计编码器计数点数,换算为里程信息,通过tf变换节点进行坐标系转换,将轮速计坐标转换到深度相机参考系下。
23、经纬高采集节点获取rtk实时差分系统数据,解算出高精度经纬高信息,与高精度栅格地图进行坐标系变换,将栅格地图转换到经纬高坐标系下。
24、imu采集节点采集小车姿态数据,超声波采集节点采集前方障碍信息,经运行控制节点判断运行是否正常,一旦前方有障碍或小车姿态数据超范围,一方面传输到移动底盘控制节点,控制移动底盘停车,一方面传输到客户端,由客户端程序进行数据分析处理。
25、小车操作终端通过人机交互界面控制小车运行和停止,并实现电务lkj数据定测和数据校验,将测量或校验的数据结果输出。
26、实现电务lkj数据定测和数据校验,其方法为:
27、第一步,小车放置在测量起点的铁轨位置,启动机器人小车,启动rtk系统;
28、第二步,启动客户端程序,进行网络连接;
29、第三步,网络连接成功后,通过人机交互控制开启小车运动;
30、第四步,小车自动在铁轨上运行,边运行边通过slam构建高精度地图;
31、第五步,到达测量终点,通过人机交互控制小车停止运行;
32、第六步,客户端获取测量范围内铁轨两边的高精度地图;
33、第七步,在地图上找到测量目标,并做标记;
34、第八步,通过地图经纬高信息、里程信息、惯导角度信息等,计算目标的测量值;
35、第九步,若是数据测量,直接将测量数据导出;
36、第十步,若是数据校验,将原始数据导入,与测量数据做比对,若结果不一致,输出提示信息。
37、小车操作终端通过4g/5g无线通信方式与上位pc终端进行数据交互,上位pc终端安装lkj基础数据编制软件,该软件导出功能可将原始数据导出,发送给小车操作终端,小车操作终端可采用导出的数据与实际测量数据做比对,比对结果发送给pc终端,pc端进行核准后将新测量的数据导入到lkj基础数据编制软件中,替换原数据。
38、与现有技术相比较,本发明提供一种基于slam的电务lkj数据定测机器人,解决了测量精度受测量工具和人员操作影响很大,初测和复测数据往往有较大误差,造成多次重复测量的问题。解决了数据编制阶段,因测量数据整理全靠技术人员手工输入,人为造成数据错误的问题和人工做大量数据计算,经常出现计算错误的问题,提高了lkj数据校验效率,也提高了数据的准确率。
- 还没有人留言评论。精彩留言会获得点赞!