基于视线追踪的轨道车辆控制方法、装置、设备及介质与流程
本发明涉及轨道交通,尤其涉及一种基于视线追踪的轨道车辆控制方法、装置、设备及介质。
背景技术:
1、随着城市轨道交通全自动无人驾驶的发展,基于激光雷达、测速设备、相机等传感器的自主感知系统成为智能列车的必须模块之一。在全自动无人驾驶场景中,自主感知系统能够取代司机对轨行区进行检测,当检测到有障碍物侵入时,实时向控制中心或司机进行报警,并检测识别障碍物类型和距离,用于提高线路运营的可靠性并降低维护成本。
2、现有技术中,轨道车辆的自动行驶大多采用基于无线通信的列车自动控制系统(communication based train control,cbtc),其主要是通过无线通信获取车辆的可行驶距离(即移动授权),再根据可行驶距离自主计算车辆速度曲线;由于异物与轨道车辆的空间距离与轨道车辆的可行驶距离并不是完全相等,因此自主感知系统虽然能够对前方轨行区范围内的障碍物进行检测,但无法根据异物对应输出可行驶距离,进而无法得到合适的速度曲线,导致轨道车辆在检测到障碍物时往往只能采取制动方式规避,且无法自主计算后续自动行驶流程。因此,如何根据轨行区范围内的障碍物感知信息,获取列车的可行驶距离,是目前业界亟待解决的重要课题。
技术实现思路
1、本发明提供一种基于视线追踪的轨道车辆控制方法、装置、设备及介质,用以解决现有技术中无法根据异物对应输出可行驶距离的缺陷,实现根据轨行区范围内的感知信息,获取列车的可行驶距离,进而可以得到合适的速度曲线。
2、本发明提供一种基于视线追踪的轨道车辆控制方法,包括以下步骤:
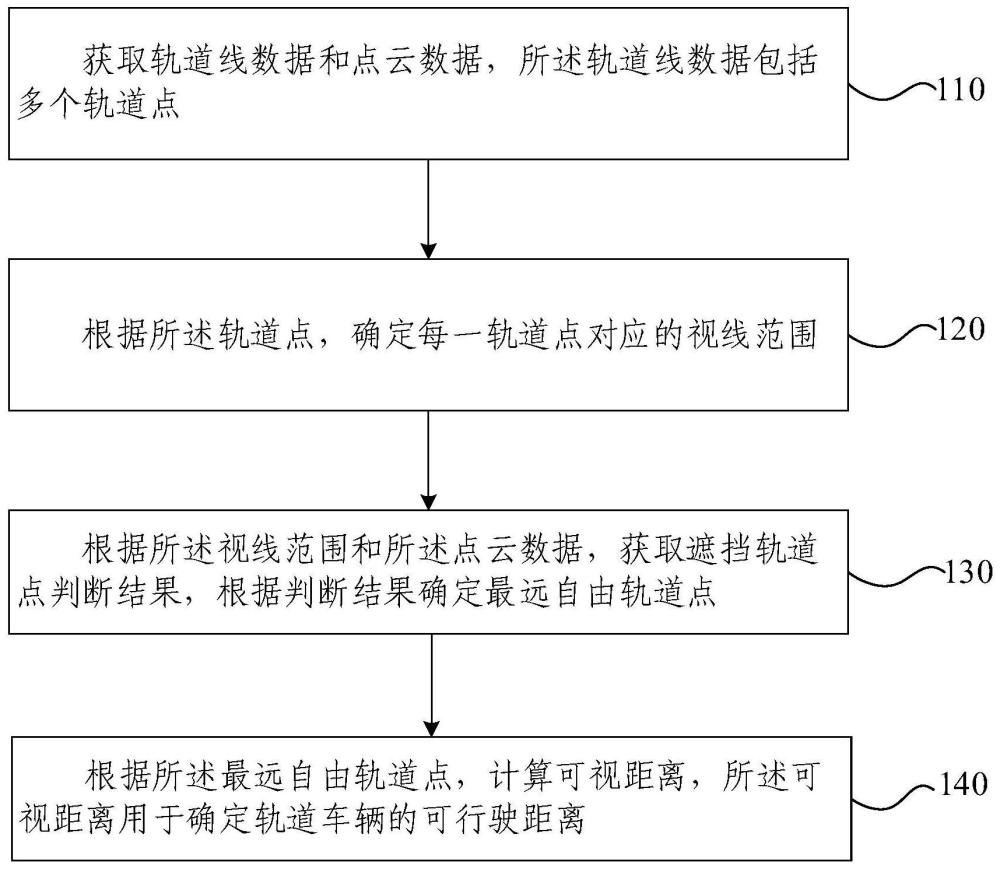
3、获取轨道线数据和点云数据,所述轨道线数据包括多个轨道点;
4、根据所述轨道点,确定每一轨道点对应的视线范围;
5、根据所述视线范围和所述点云数据,获取遮挡轨道点判断结果,根据判断结果确定最远自由轨道点;
6、根据所述最远自由轨道点,计算可视距离,所述可视距离用于确定轨道车辆的可行驶距离。
7、根据本发明提供的基于视线追踪的轨道车辆控制方法,所述根据所述轨道点,确定每一轨道点对应的视线范围,包括以下步骤:
8、确定轨道车辆视线原点;
9、根据所述轨道点与所述轨道车辆视线原点确定视线范围,所述视线范围包括所述轨道点与所述轨道车辆视线原点。
10、根据本发明提供的基于视线追踪的轨道车辆控制方法,所述根据所述轨道点与所述轨道车辆视线原点确定视线范围,具体为:
11、连接所述轨道点与所述轨道车辆视线原点,得到所述轨道点对应的连接线;
12、根据所述连接线,确定所述轨道点对应的视线范围,所述视线范围以所述连接线为轴线。
13、根据本发明提供的基于视线追踪的轨道车辆控制方法,所述根据所述视线范围和所述点云数据,获取遮挡轨道点判断结果,根据判断结果确定最远自由轨道点,包括以下步骤:
14、将轨道点按轨道点到轨道车辆的沿轨道距离由近到远进行排序,得到待判断序列;
15、依次选择待判断序列内的轨道点,判断所述轨道点对应的视线范围与所述点云数据是否存在交集;
16、若存在交集,则将所述轨道点标记为遮挡轨道点,并停止判断,确定待判断序列中所述遮挡轨道点的前序轨道点为最远自由轨道点。
17、根据本发明提供的基于视线追踪的轨道车辆控制方法,所述点云数据为实时扫描点云数据,和/或,点云地图数据。
18、根据本发明提供的基于视线追踪的轨道车辆控制方法,所述根据所述最远自由轨道点,计算可视距离步骤,包括以下步骤:
19、计算所述最远自由轨道点到轨道车辆的空间距离,得到第一距离;
20、检测空间中是否存在障碍物,若存在,则确定障碍物到轨道车辆的空间距离为第二距离;
21、将第一距离和第二距离中的最小值确定为可视距离。
22、本发明还提供一种基于视线追踪的轨道车辆控制装置,包括:
23、数据获取模块,用于获取轨道线数据和点云数据,所述轨道线数据包括多个轨道点;
24、视线范围确定模块,用于根据所述轨道点,确定每一轨道点对应的视线范围;
25、遮挡判断模块,用于根据所述视线范围和所述点云数据,获取遮挡轨道点判断结果,根据判断结果确定最远自由轨道点;
26、可视距离计算模块,用于根据所述最远自由轨道点,计算可视距离,所述可视距离用于确定轨道车辆的可行驶距离。
27、本发明还提供一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如上述任一种所述的基于视线追踪的轨道车辆控制方法。
28、本发明还提供一种非暂态计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现如上述任一种所述的基于视线追踪的轨道车辆控制方法。
29、本发明还提供一种计算机程序产品,包括计算机程序,所述计算机程序被处理器执行时实现如上述任一种所述的基于视线追踪的轨道车辆控制方法。
30、本发明提供的基于视线追踪的轨道车辆控制方法、装置、设备及介质,通过以轨道点为独立检测单元进行障碍物检测,再确定最远自由轨道点进一步计算可视距离,根据可视距离可以确定轨道车辆的可行驶距离,从而实现根据轨行区范围内的感知信息,获取列车的可行驶距离,与传统的依据整体空间范围检测的方法相比,本发明提高了轨道测量自主感知系统的自主性和灵活性。
技术特征:
1.一种基于视线追踪的轨道车辆控制方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的基于视线追踪的轨道车辆控制方法,其特征在于,所述根据所述轨道点,确定每一轨道点对应的视线范围,包括以下步骤:
3.根据权利要求2所述的基于视线追踪的轨道车辆控制方法,其特征在于,所述根据所述轨道点与所述轨道车辆视线原点确定视线范围,具体为:
4.根据权利要求1所述的基于视线追踪的轨道车辆控制方法,其特征在于,所述根据所述视线范围和所述点云数据,获取遮挡轨道点判断结果,根据判断结果确定最远自由轨道点,包括以下步骤:
5.根据权利要求4所述的基于视线追踪的轨道车辆控制方法,其特征在于,所述点云数据为实时扫描点云数据,和/或,点云地图数据。
6.根据权利要求1所述的基于视线追踪的轨道车辆控制方法,其特征在于,所述根据所述最远自由轨道点,计算可视距离步骤,包括以下步骤:
7.一种基于视线追踪的轨道车辆控制装置,其特征在于,包括:
8.一种电子设备,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述程序时实现如权利要求1至6任一项所述基于视线追踪的轨道车辆控制方法。
9.一种非暂态计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至6任一项所述基于视线追踪的轨道车辆控制方法。
10.一种计算机程序产品,包括计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至6任一项所述基于视线追踪的轨道车辆控制方法。
技术总结
本发明涉及轨道交通技术领域,尤其涉及一种基于视线追踪的轨道车辆控制方法、装置、设备及介质。本发明通过以轨道点为独立检测单元进行障碍物检测,再确定最远自由轨道点进一步计算可视距离,根据可视距离可以确定轨道车辆的可行驶距离,从而实现根据轨行区范围内的感知信息,获取列车的可行驶距离,与传统的依据整体空间范围检测的方法相比,本发明提高了轨道测量自主感知系统的自主性和灵活性。
技术研发人员:张宇旻,张强
受保护的技术使用者:北京埃福瑞科技有限公司
技术研发日:
技术公布日:2024/4/7
- 还没有人留言评论。精彩留言会获得点赞!