列车智能控制系统、方法、电子设备和存储介质与流程
本发明涉及轨道交通,尤其涉及一种列车智能控制系统、方法、电子设备和存储介质。
背景技术:
1、相关技术中胶轮列车分为以地面b型半专用路权运行的电子导向胶轮列车和以高架a型专用路权运行的胶轮自导向列车,两者因其技术特征均限制了运行场景,胶轮列车无法既可运行于带两侧导向轨的a型专用路权段,也可运行于与地面交通工具混行的b型半专用路权段,灵活性较低。
技术实现思路
1、本发明提供一种列车智能控制系统、方法、电子设备和存储介质,使得胶轮列车既可运行于a型专用路权路段,也可运行于b型半专用路权路段,且可实现两者不停车无缝切换,提高胶轮列车的灵活性。
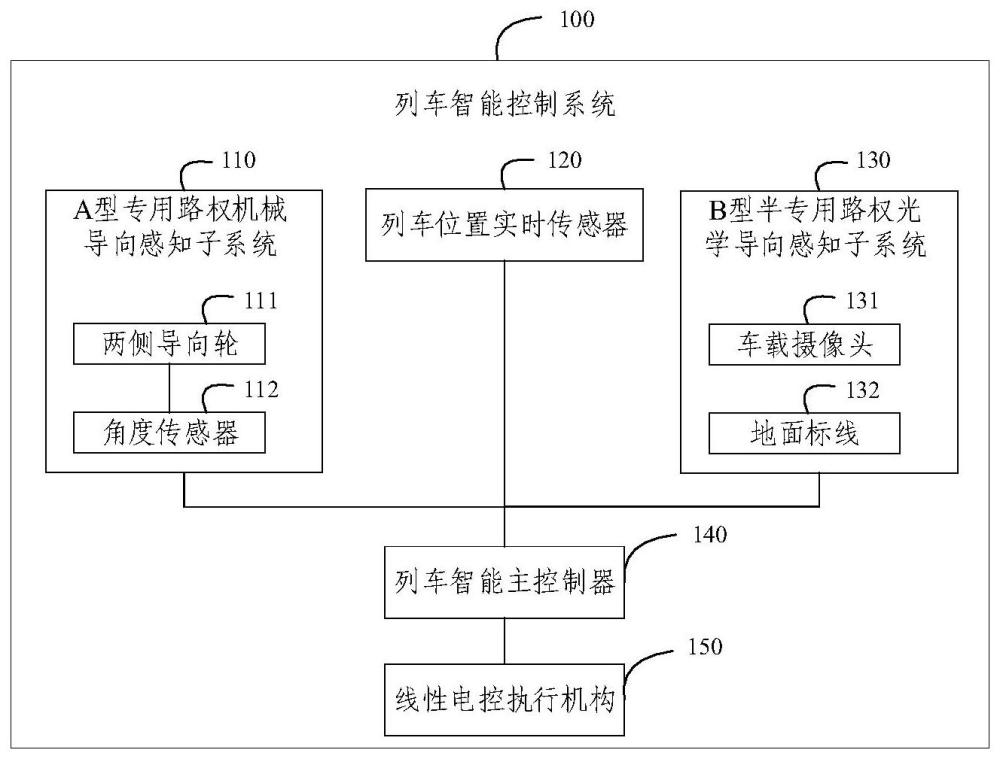
2、本发明提供一种列车智能控制系统,包括:a型专用路权机械导向感知子系统、列车位置实时传感器、b型半专用路权光学导向感知子系统、列车智能主控制器和线性电控执行机构;其中,所述a型专用路权机械导向感知子系统包括两侧导向轮和安装于所述导向轮上的角度传感器,所述b型半专用路权光学导向感知子系统包括车载摄像头和地面标线;
3、所述a型专用路权机械导向感知子系统用于通过所述角度传感器实时检测所述两侧导向轮的偏转角度,并将所述两侧导向轮的偏转角度发送至所述列车智能主控制器;
4、所述列车位置实时传感器用于获取列车的实时位置,并将所述列车的实时位置发送至所述列车智能主控制器;
5、所述b型半专用路权光学导向感知子系统用于通过所述车载摄像头拍摄所述地面标线,获得包括所述列车和所述地面标线的图像,并将所述图像发送至所述列车智能主控制器;
6、所述列车智能主控制器用于基于所述列车的实时位置、所述两侧导向轮的偏转角度和所述图像中的一项或多项,生成列车控制信号,并向所述线性电控执行机构发送所述列车控制信号;
7、所述线性电控执行机构用于基于所述列车控制信号,调整所述列车的行驶状态。
8、根据本发明提供的一种列车智能控制系统,所述列车智能主控制器还用于:
9、在生成列车控制信号之前,基于所述列车的位置,确定所述列车所处的道路为a型专用路权或b型半专用路权;
10、在所述列车所处道路的路权为a型专用路权,且所述两侧导向轮的偏转角度不为0的情况下,确定启动a型专用路权控制;或,
11、在所述列车所处道路的路权为b型半专用路权,且所述两侧导向轮的偏转角度为0的情况下,确定启动b型半专用路权控制。
12、根据本发明提供的一种列车智能控制系统,所述列车智能主控制器具体用于:
13、在确定启动a型专用路权控制后,基于所述列车的位置,确定所述列车所处的路段为直线路段或曲线路段;
14、当所述列车所处的路段为直线路段,且所述两侧导向轮的偏转角度相同时,生成第一列车控制信号,以使所述线性电控执行机构基于所述第一列车控制信号,控制所述列车直线行驶;或,
15、当所述列车所处的路段为曲线路段,且所述两侧导向轮中右侧导向轮的偏转角度大于左侧导向轮的偏转角度时,生成第二列车控制信号,以使所述线性电控执行机构基于所述第二列车控制信号,控制所述列车左转;或,
16、当所述列车所处的路段为曲线路段,且所述两侧导向轮中右侧导向轮的偏转角度小于左侧导向轮的偏转角度时,生成第三列车控制信号,以使所述线性电控执行机构基于所述第三列车控制信号,控制所述列车右转。
17、根据本发明提供的一种列车智能控制系统,所述列车智能主控制器具体用于:
18、在确定启动b型半专用路权控制后,识别所述图像中列车相对于地面标线的方向和距离偏差;
19、基于所述列车相对于地面标线的方向和距离偏差,生成第四列车控制信号,以使所述线性电控执行机构基于所述第四列车控制信号,控制所述列车沿所述地面标线行驶。
20、本发明还提供一种列车智能控制方法,包括:
21、获取列车的两侧导向轮的偏转角度、所述列车的实时位置和包含所述列车和地面标线的图像;
22、基于所述列车的实时位置、所述两侧导向轮的偏转角度和所述图像中的一项或多项,生成列车控制信号;
23、基于所述列车控制信号,调整所述列车的行驶状态。
24、根据本发明提供的一种列车智能控制方法,在生成列车控制信号之前,所述方法还包括:
25、基于所述列车的位置,确定所述列车所处的道路为a型专用路权或b型半专用路权;
26、在所述列车所处道路的路权为a型专用路权,且所述两侧导向轮的偏转角度不为0的情况下,确定启动a型专用路权控制;或,
27、在所述列车所处道路的路权为b型半专用路权,且所述两侧导向轮的偏转角度为0的情况下,确定启动b型半专用路权控制。
28、根据本发明提供的一种列车智能控制方法,在确定启动a型专用路权控制后,所述基于所述列车的实时位置、所述两侧导向轮的偏转角度和所述图像信号,生成列车控制信号,包括:
29、基于所述列车的位置,确定所述列车所处的路段为直线路段或曲线路段;
30、当所述列车所处的路段为直线路段,且所述两侧导向轮的偏转角度相同时,生成第一列车控制信号,所述第一列车控制信号用于控制所述列车直线行驶;或,
31、当所述列车所处的路段为曲线路段,且所述两侧导向轮中右侧导向轮的偏转角度大于左侧导向轮的偏转角度时,生成第二列车控制信号,所述第二列车控制信号用于控制所述列车左转;或,
32、当所述列车所处的路段为曲线路段,且所述两侧导向轮中右侧导向轮的偏转角度小于左侧导向轮的偏转角度时,生成第三列车控制信号,所述第三列车控制信号用于控制所述列车右转。
33、根据本发明提供的一种列车智能控制方法,在确定启动b型半专用路权控制后,所述基于所述列车的实时位置、所述两侧导向轮的偏转角度和所述图像中的一项或多项,生成列车控制信号,包括:
34、识别所述图像中列车相对于地面标线的方向和距离偏差;
35、基于所述列车相对于地面标线的方向和距离偏差,生成第四列车控制信号,所述第四列车控制信号用于控制所述列车沿所述地面标线行驶。
36、本发明还提供一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如上述任一种所述列车智能控制方法。
37、本发明还提供一种非暂态计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现如上述任一种所述列车智能控制方法。
38、本发明还提供一种计算机程序产品,包括计算机程序,所述计算机程序被处理器执行时实现如上述任一种所述列车智能控制方法。
39、本发明提供的列车智能控制系统、方法、电子设备和存储介质,通过判断列车位置、检测两侧导向轮偏转角度和包括列车与地面标线的图像,可以确定列车所处路段的路权信息,并生成对应位置的控制信号,在不同的路权采用不同的控制方式,使得胶轮列车既可运行于a型专用路权路段,也可运行于b型半专用路权路段,且可实现两者不停车无缝切换,提高列车的灵活性。
- 还没有人留言评论。精彩留言会获得点赞!