一种伴随主动式轨道障碍物探测方法及装置与流程
本发明涉及一种伴随主动式轨道障碍物探测方法及装置,属于轨道交通智能检测。
背景技术:
1、在轨道交通领域,列车的行驶是以列控信号控制的自动驾驶为主,人工驾驶为辅的驾驶方式。由于列车质量大、速度快,其制度距离较长,因此为保障列车的行驶安全,需要对前方较长距离的区间内的障碍物进行探测,但由于距离长且部分场景存在弯道等情况,列车前方障碍物检测存在一定的技术难度。
2、列车前方障碍物探测的传统方法包括轨道电路红光带检测、司机目视检查等,轨道电路红光带检测主要用于对前方轨道上的车辆进行判断,或对是否存在跨接左右钢轨的导体进行检测,无法对泥石流、人员等进行检测;司机目视检查距离有限,且存在弯道遮挡和反应迟缓问题。借鉴汽车领域自动驾驶相关技术,在列车车头处安装相机、激光雷达、毫米波雷达等对前方轨道线路进行检测是一种新的方式,但列车检测距离一般要求为500-1000米,且经常存在弯道干扰,导致该方法存在一定的使用局限。
技术实现思路
1、本发明的目的在于提供一种伴随主动式轨道障碍物探测方法及装置,以解决现有技术在列车车头处安装相机、激光雷达、毫米波雷达等对前方轨道线路进行检测存在弯道干扰的问题。
2、一种伴随主动式轨道障碍物探测方法,所述方法包括:
3、获取列车运动速度,并与列车同速同向采集轨道线路视频图像以及三维点云;
4、对采集的轨道线路视频图像以及三维点云进行处理分析,根据分析结果对障碍物进行目标检测和识别,并将识别结果发送至列车控制系统。
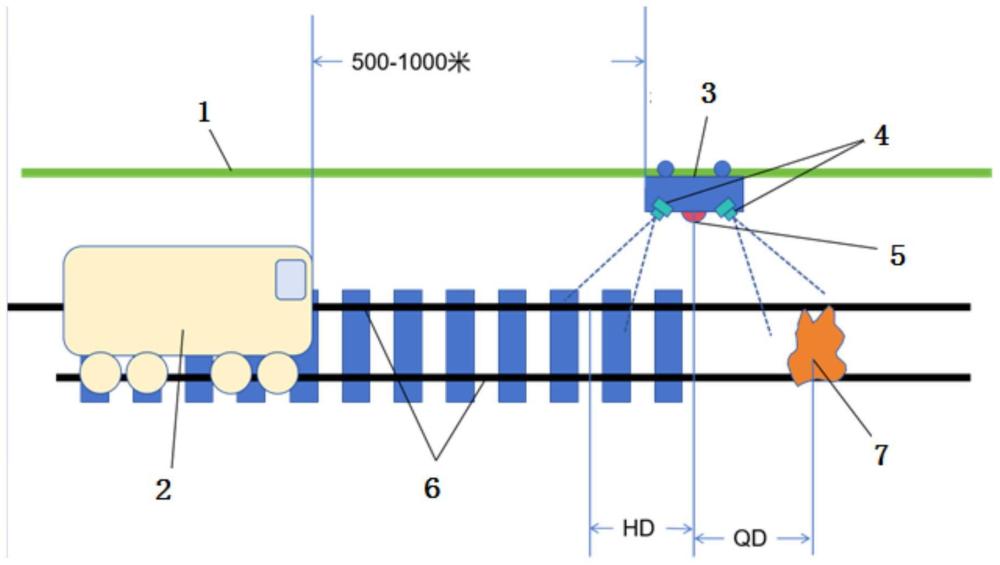
5、进一步地,所述采集轨道线路视频图像以及三维点云使用前后双向检测的二次确认机制。
6、进一步地,所述二次确认机制的方法包括:
7、通过前向视觉相机和激光雷达进行第一次检测,当检测到前方存在障碍物后,计算第二次出现障碍物的时间t;
8、当经过2t时间内,若在后向视觉相机内第二次检测到障碍物出现,则判断存在障碍物。
9、进一步地,所述计算第二次出现障碍物的时间t的公式为:
10、t=(qd+hd)/v,其中,qd为激光雷达前向障碍物检测距离、hd为激光雷达后向障碍物检测距离、v为列车的实时速度,通过实时通信获取。
11、进一步地,所述激光雷达为360°环形激光雷达,用于同时对前后双向的障碍物进行检测。
12、一种伴随主动式轨道障碍物探测装置,所述装置包括轨道式的运动机器人,所述运动机器人的轨道安装于线路或者隧道上方,所述运动机器人搭载可见光视觉相机和激光雷达,所述激光雷达安装于运动机器人的下方,所述可见光视觉相机分别安装运动机器人斜向前和斜向后的位置。
13、进一步地,还包括数据处理工控机,所述数据处理工控机用于对视频图像和三维点云进行处理分析。
14、进一步地,所述运动机器人搭载无线蜂窝通信模块,所述无线蜂窝通信模块用于实时与列车进行通信。
15、与现有技术相比,本发明所达到的有益效果:
16、本发明采用伴随主动式的探测机器人,跟随列车行驶方向进行同步行驶,对前方障碍物进行探测,并同列车进行实时通信,能够有效解决探测距离远导致传感器的空间分辨率下降以及弯道遮挡问题;同时,机器人采用前后双向探测,能够对同一障碍物进行前后两次确认,进一步提高了检测的可靠性。
技术特征:
1.一种伴随主动式轨道障碍物探测方法,其特征在于,所述方法包括:
2.根据权利要求1所述的伴随主动式轨道障碍物探测方法,其特征在于,所述采集轨道线路视频图像以及三维点云使用前后双向检测的二次确认机制。
3.根据权利要求2所述的伴随主动式轨道障碍物探测方法,其特征在于,所述二次确认机制的方法包括:
4.根据权利要求3所述的伴随主动式轨道障碍物探测方法,其特征在于,所述计算第二次出现障碍物的时间t的公式为:
5.根据权利要求3所述的伴随主动式轨道障碍物探测方法,其特征在于,所述激光雷达为360°环形激光雷达,用于同时对前后双向的障碍物进行检测。
6.一种伴随主动式轨道障碍物探测装置,其特征在于,所述装置包括轨道式的运动机器人,所述运动机器人的轨道安装于线路或者隧道上方,所述运动机器人搭载可见光视觉相机和激光雷达,所述激光雷达安装于运动机器人的下方,所述可见光视觉相机分别安装运动机器人斜向前和斜向后的位置。
7.根据权利要求6所述的伴随主动式轨道障碍物探测装置,其特征在于,还包括数据处理工控机,所述数据处理工控机用于对视频图像和三维点云进行处理分析。
8.根据权利要求6所述的伴随主动式轨道障碍物探测装置,其特征在于,所述运动机器人搭载无线蜂窝通信模块,所述无线蜂窝通信模块用于实时与列车进行通信。
技术总结
本发明公开了一种伴随主动式轨道障碍物探测方法,所述方法包括:获取列车运动速度,并与列车同速同向采集轨道线路视频图像以及三维点云;对采集的轨道线路视频图像以及三维点云进行处理分析,根据分析结果对障碍物进行目标检测和识别,并将识别结果发送至列车控制系统;本发明采用伴随主动式的探测机器人,跟随列车行驶方向进行同步行驶,对前方障碍物进行探测,并同列车进行实时通信,能够有效解决探测距离远导致传感器的空间分辨率下降以及弯道遮挡等问题;同时,机器人采用前后双向探测,能够对同一障碍物进行前后两次确认,进一步提高了检测的可靠性。
技术研发人员:宫政,陈仕林,王满意,王欢
受保护的技术使用者:江苏集萃智能光电系统研究所有限公司
技术研发日:
技术公布日:2024/5/16
- 还没有人留言评论。精彩留言会获得点赞!