车辆用灯具的制作方法
本发明涉及车辆用灯具。
背景技术:
作为二轮车用的前照灯,有远光灯
·
近光灯的光源(专利文献1)。现有技术文献专利文献专利文献1:国际申请公报wo2019/039051
技术实现要素:
发明所要解决的技术问题在四轮车中提出有以下系统:将从前照灯照射的配光图案由水平方向并列的多个区域构成,通过根据车辆外部的对象物使该多个区域中一部分区域为非照射,从而形成例如不给对向车带来眩光的配光图案。在二轮车中,在左右转时驾驶员使重心移动,朝向转向方向使车身倾斜而扩大侧倾角的同时在拐角处行驶,因此随着侧倾角产生前照灯形成的配光图案也从水平方向倾斜。在从水平方向倾斜的配光图案中,当想要采用与四轮车相同的系统以使不给对向车等对象物带来眩光时,可能不得不将非照射范围扩大到本来不必要为非照射的范围。另外,在相对于水平方向倾斜的配光图案中,尽管光照射到基准线以下区域不会对对向车等对象物带来眩光,但是在具有对象物的情况下光源被熄灭(专利文献1)。不必要的熄灭会给机动二轮车的驾驶员带来不适。因此,本发明的目的在于,提供能够在车身处于倾斜状态下形成的配光图案中使不向对象物照射光的非照射范围尽可能缩小的车辆用灯具。另外,本发明的目的在于,提供形成不给机动二轮车的驾驶员带来不适的配光图案的车辆用灯具。用于解决技术问题的技术方案为了达成上述目的,本发明的一个侧面的车辆用灯具设置于通过使车身朝向转向方向倾斜而在拐角行驶的车辆,该车辆用灯具具备:光源;光学部件,其将来自所述光源的光朝向灯具前方照射而形成规定的配光图案;控制部,其在感测到所述车辆外部的对象物的情况下,调节所述规定的配光图案以包含不向所述对象物照射所述光的第一非照射范围;所述控制部构成为基于所述车身处于直行状态的情况下规定所述第一非照射范围,在所述车身处于转弯状态的情况下,根据所述车身的倾斜状态取得所述对象物的高度信息,并基于所述高度信息规定比所述第一非照射范围更窄的第二非照射范围,调节所述规定的配光图案以使包含所述第二非照射范围代替所述第一非照射范围。
另外,为了达成上述目的,本发明的一个侧面的车辆用灯具设置于通过使车身朝向转向方向倾斜而在拐角行驶的车辆,该车辆用灯具具备:光源;光学部件,其将来自所述光源的光朝向灯具前方照射而形成规定的配光图案;内部传感器,其检测所述车身的倾斜;外部传感器,其检测对象物;控制部,其控制所述光源和所述光学部件的至少一方以调节所述配光图案;所述配光图案包含多个范围,在所述内部传感器检测到所述车身倾斜为规定角以上的情况下,所述配光图案包含规定基准线以下的第一区域、和在所述基准线以上的第二区域,所述基准线是沿所述车身的左右方向延伸的、与水平线平行的线,具有距离所述水平线规定的高度,在所述多个范围中的一个范围只包含所述第一区域的情况下,不管所述外部传感器的检测结果如何,所述控制部调节所述配光图案以使所述光继续对所述一个范围照射。发明效果根据本发明,能够提供在车身倾斜的状态下形成的配光图案中能够尽可能地缩小不向对象物照射光的非照射范围的车辆用灯具。另外,根据本发明,能够提供形成不给机动二轮车的驾驶员带来不适的配光图案的车辆用灯具。
附图说明
图1是具备本发明第一实施方式的头灯(车辆用灯具)的车辆的立体图。图2是图1所示的头灯的框图。图3是示出头灯具备的远光灯灯具单元的结构的截面图。图4是示出图3的远光灯灯具单元具备的光源单元结构的立体图。图5是说明由远光灯灯具单元形成的远光灯配光图案的图。图6是说明远光灯配光图案的图。图7a是说明规定最小遮光范围的控制方法的变形例的图。图7b是说明规定最小遮光范围的控制方法的变形例的图。图8是示出第二实施方式的头灯具备的远光灯灯具单元结构的截面图。图9是示出图8的远光灯灯具单元具备的光学部件结构的立体图。图10是示出车辆相对于路面处于倾斜状态下行驶情况的配光图案的一例的图。图11是示出车辆相对于路面处于倾斜状态下行驶情况的配光图案的其他例的图。图12是示出配光图案的调节方法的流程图。
具体实施方式
参照附图对本发明的实施方式进行说明。需要注意的是,本实施方式中的“左右方向”、“前后方向”、“上下方向”是指为了说明方便,对图1所示的车辆100所设定的相对的方向。
(第一实施方式)图1示出作为第一实施方式中的车辆的一例的机动二轮车100。机动二轮车100是能够通过使车身朝向转向的方向倾斜并沿着道路的拐角(弯道)行驶的车辆。本实施方式的车辆只要是能够与该机动二轮车100一样,通过使车身朝向转向的方向倾斜而在拐角行驶的车辆即可,车轮的数量不限定。因此,例如即使为机动三轮车、机动四轮车等,只要能够与该机动二轮车100同样地行驶,都包含于本实施方式的车辆。如图1所示,在机动二轮车100的前部,搭载有本实施方式的头灯1(车辆用灯具的一例)。头灯1是能够照射车辆前方的灯具,具备近光灯灯具单元2、和远光灯灯具单元3。需要注意的是,在本实施方式中,例示出具备一个头灯1的机动二轮车100,但也可以为具备例如在左右各一个头灯的机动二轮车。如图2所示,头灯1具备控制近光灯灯具单元2以及远光灯灯具单元3的动作的灯控制部5(控制部的一例)。近光灯灯具单元2以及远光灯灯具单元3与灯控制部5连接。另外,感测机动二轮车100的倾斜状态的侧倾角传感器6(内部传感器的一例)、感测车辆外部环境信息的外部传感器7、和感测机动二轮车100的速度的速度传感器8等与灯控制部5电连接。侧倾角传感器6是能够感测机动二轮车100的车身相对于铅垂线左右倾斜时的倾斜角的传感器。侧倾角传感器6例如由陀螺仪传感器构成。需要注意的是,车身的倾斜角例如也可以基于由搭载于车身的相机拍摄的图像而算出。外部传感器7是能够取得包含机动二轮车100的周边环境(例如障害物、他车(前行车、对向车)、步行者、道路形状、交通标识等)的本车辆的外部信息的传感器。外部传感器7例如由lidar(light detection and ranging或者laser imaging detection and ranging)、相机、雷达等至少一种构成。由侧倾角传感器6、外部传感器7以及速度传感器8感测的各个信息向灯控制部5发送。灯控制部5基于从各个传感器6~8发送来的信息,控制近光灯灯具单元2以及远光灯灯具单元3。例如灯控制部5基于各个传感器的感测信息控制头灯1(近光灯灯具单元2以及远光灯灯具单元3),能够调整在车辆前方形成的配光图案(近光灯配光图案以及远光灯配光图案)。图3是示出头灯1具备的远光灯灯具单元3的概略结构的垂直截面图。如图3所示,头灯1具备在车辆前方侧具有开口部的灯体11、以覆盖灯体11的开口部的方式安装的透明的前表面罩12。在由灯体11和前表面罩12形成的灯室13的内部收纳有远光灯灯具单元3、灯控制部5、侧倾角传感器6、以及外部传感器(例如lidar)7等。需要注意的是,在图3的截面图中虽未图示,但近光灯灯具单元2也与远光灯灯具单元3一样收纳于头灯1的灯室13的内部。远光灯灯具单元3是所谓的投影型的灯具。远光灯灯具单元3具备投影透镜31(光学部件的一例)、具有远光灯的光源33(光源的一例)的光源单元32、和保持投影透镜31以及光源单元32的保持架34。投影透镜31是前方侧表面为凸面且后方侧表面为平面的平凸非球面透镜,并配置于沿车辆前后方向延伸的光轴ax上。投影透镜31的周缘部保持于保持架34的前端侧。投影透镜31将来自光源33的光向灯具前方照射而形成规定的远光灯配光图案。光源单元32配置为使光源33朝向光轴ax方向中的前方,并保持于保持架34的后端侧。光源33与灯控制部5电连接。保持架34经由未图示的支承部件安装于灯体11。图4是示出远光灯灯具单元3的光源单元32的概略构造的立体图。光源单元32具有
光源33、支承板35、散热器36。光源33例如具有由发光二极管(led)等发光元件构成的多个单独光源30。光源33例如具有以横9列纵1行并列配置的单独光源30a~30i,并固定于支承板35的前方侧表面。单独光源30a~30i构成为led阵列。各个单独光源30a~30i与灯控制部5电连接。单独光源30a~30i在后述的adb(adaptive driving beam,自适应远光灯)模式中,由灯控制部5相互独立地控制光的照射。单独光源30a~30i在左右方向(与光轴ax正交的方向)并列配置。单独光源30的数量和配置未特别限定。散热器36是用于使从光源33发出的热量发散的部件,并保持于支承板35的车辆后方侧表面。光源单元32经由支承板35固定于保持架34。接着,参照图5以及图6对由搭载于机动二轮车100的头灯1形成的第一实施方式的配光图案进行说明。图5是在机动二轮车100的车身为直行状态时,即机动二轮车100使车身相对于路面处于垂直的状态进行行驶时的向灯具前方形成的配光图案(远光灯配光图案ph以及近光灯配光图案pl)。所谓的机动二轮车100的车身为直行状态的情况例如包含车身的倾斜相对于车身为垂直的情况为
±
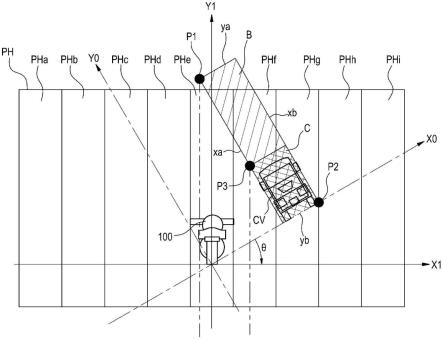
10度以内的情况。图6是在机动二轮车100的车身为转弯状态时,例如为了在朝右的拐角行驶使车身相对于路面向右倾斜的状态下行驶时向灯具前方形成的配光图案(在本例仅示出远光灯配光图案ph)。远光灯配光图案ph是由远光灯灯具单元3形成的配光图案。近光灯配光图案pl是由近光灯灯具单元2形成的配光图案。在图5以及图6中,示出在灯具前方的规定位置例如配置于灯具前方25m的位置的假想铅直屏幕上形成的配光图案。另外,机动二轮车100和对向车cv分别显示于单独的坐标系。对向车cv显示于道路坐标系x0-y0上。机动二轮车100显示于二轮车坐标系x1-y1上。在机动二轮车100以直行状态行驶的图5的情况下,道路坐标系x0-y0和二轮车坐标系x1-y1一致地显示。需要注意的是,h-h表示水平方向,v-v表示垂直方向。如图5以及图6所示,远光灯配光图案ph是部分图案pha~phi沿水平方向并列的配光图案。各个部分图案pha~phi由单独光源30a~30i分别形成。部分图案pha是由单独光源30a形成的图案。同样地,部分图案phb由单独光源30b形成,部分图案phc由单独光源30c形成,部分图案phd由单独光源30d形成,部分图案phe由单独光源30e形成,部分图案phf由单独光源30f形成,部分图案phg由单独光源30g形成,部分图案phh由单独光源30h形成,部分图案phi由单独光源30i形成的图案。远光灯配光图案ph通过在adb模式中组合各个部分图案pha~phi的形成和不形成,能够根据本车和对向车或者前行车的状况形成不同样态的远光灯配光图案。接着,对由灯控制部5实行的adb模式进行说明。灯控制部5基于例如外部传感器7取得的环境信息,感测包含对向车的存在与否以及对向车的存在位置(从机动二轮车100到对向车的距离、假想铅直屏幕中的对向车的位置坐标等)的对向车的状况。另外,灯控制部5例如基于侧倾角传感器6取得的车身的倾斜角信息,感测本车的状况。另外,灯控制部5基于例如速度传感器8取得的速度信息,感测包含本车的行驶和停止的本车的状况。灯控制部5基于外部传感器7、侧倾角传感器6、以及速度传感器8取得的信息,对各个单独光源30的点亮熄灭单独控制。灯控制部5使单独光源30中、与对向车等对象物不存在的区域对应的单独光源30为点亮状态,使与对向车等对象物存在的区域对应的单独光源30为熄灭状态。例如,在图5中,灯控制部5基于外部传感器7以及速度传感器8取得的信息,算出对
向车cv的存在方向(对向车cv中的左右侧部位置)或从机动二轮车100到对向车cv的距离等。另外,灯控制部5基于侧倾角传感器6取得的信息算出本车的行驶倾斜角度。灯控制部5基于由外部传感器7、侧倾角传感器6等取得的信息,规定通常遮光范围a(第一非照射范围的一例)作为用于不向对向车cv照射光的遮光范围。在通常遮光范围a中,在道路坐标系x0-y0中通过对向车cv的左侧部且沿y0轴方向延伸的边界线xa、和通过对向车cv的右侧部且沿y0轴方向延伸的边界线xb之间被规定为x0轴方向的范围。另外,在通常遮光范围a中,在通过边界线xa,xb与二轮车坐标系x1-y1中的远光灯配光图案ph的上部边界相交的点且沿x0轴方向延伸的边界线ya、和通过边界线xa,xb与二轮车坐标系x1-y1的x1轴相交的点且沿x0轴方向延伸的边界线yb之间被规定为y0轴方向的范围。需要注意的是,通常遮光范围a也可以规定为比对向车cv稍大的范围或者比对向车cv稍小的范围。在道路坐标系x0-y0和二轮车坐标系x1-y1一致的图5的示例的情况下,道路坐标系x0-y0中的通常遮光范围a内的各点的坐标值与二轮车坐标系x1-y1中的远光灯配光图案ph内的相同的坐标值建立对应。灯控制部5基于规定的通常遮光范围a,将在二轮车坐标系x1-y1中与远光灯配光图案ph中的不存在对向车cv的区域对应的部分图案pha~phf、phi判断为照射区域。灯控制部5使与该照射区域(部分图案pha~phf、phi)对应的单独光源30a~30f、30i为点亮状态。另一方面,灯控制部5基于规定的通常遮光范围a,将在二轮车坐标系x1-y1中与远光灯配光图案ph中的存在对向车cv的区域对应的部分图案phg、phh判断为非照射区域(遮光区域)。灯控制部5使与该非照射区域(部分图案phg、phh)对应的单独光源30g、30h为熄灭状态。由此,在机动二轮车100以直行状态行驶的情况下,以包含用于不向对向车cv照射光的通常遮光范围a的方式形成与对向车cv存在区域对应的部分图案phg和phh被作为非照射区域的远光灯配光图案ph。需要注意的是,在“非照射区域”中,可以包含不给对向车的驾驶员带来眩光程度地以低照度照射光的区域。接着,如图6所示,在机动二轮车100处于转弯状态的情况下,例如使车身相对于路面向右倾斜θ角度的情况下,二轮车坐标系x1-y1为相对于道路坐标系x0-y0倾斜θ角度的状态。需要注意的是,在图6中,二轮车坐标系x1-y1以沿着纸面的水平方向以及垂直方向进行显示。在图6所示的示例中,灯控制部5也与在图5说明的情况(车身处于直行状态的情况)相同,基于由外部传感器7、侧倾角传感器6等取得的对向车cv的信息,在道路坐标系x0-y0上规定被边界线xa,xb,ya,yb包围的通常遮光范围b(第一非照射范围的一例)。例如,灯控制部5基于车身的倾斜角θ等信息,将作为通常遮光范围b中的边界线xa和边界线ya的交点的左上点p1的坐标值、和作为边界线xb和边界线yb的交点的右下点p2的坐标值进行坐标变换,作为二轮车坐标系x1-y1上的坐标值分别算出。此时,道路坐标系x0-y0中的通常遮光范围b的左上点p1的坐标值(x01,y01)例如作为二轮车坐标系x1-y1中的坐标值(x11,y11)被算出。另外,道路坐标系x0-y0中的通常遮光范围b的左上点p2的坐标值(x02,y02)例如作为二轮车坐标系x1-y1中的坐标值(x12,y12)被算出。左上点p1以及右下点p2的二轮车坐标系x1-y1中的坐标值是根据车身的倾斜角度而变化的值。灯控制部5作为在二轮车坐标系x1-y1中与坐标值(x11,y11)对应的区域,特定在x0轴方向区域内包含坐标值x11的远光灯配光图案ph的部分图案phe。另外,灯控制部5作为
在二轮车坐标系x1-y1中与坐标值(x12,y12)对应的区域,特定在x0轴方向区域内包含坐标值x12的远光灯配光图案ph的部分图案phh。灯控制部5将从特定的部分图案phe到部分图案phh的部分图案phe、phf、phg、phh判断为非照射区域。灯控制部5使与该非照射区域(部分图案phe、phf、phg、phh)对应的单独光源30e、30f、30g、30h为熄灭状态。另一方面,灯控制部5将部分图案phe,phf,phg,phh以外的部分图案pha~phd、以及phi判断为照射区域。灯控制部5使与该照射区域(部分图案pha~phd,phi)对应的单独光源30a~30d,30i为点亮状态。这样,在以车身为倾斜情况下规定的通常遮光范围b的左上点p1和右下点p2为基准设定远光灯配光图案ph的非照射区域的情况下,例如与在图5说明的车身处于直行状态情况下设定的非照射区域相比,非照射区域的范围变大。具体地,与图5中说明的车身处于直行状态情况下设定的通常遮光范围a对应的非照射区域为2个部分图案phg、phh,与此相对,与车身处于转弯状态情况下设定的通常遮光范围b对应的非照射区域变为4个部分图案phe、phf、phg、phh。对此,在本实施方式的头灯1中,灯控制部5选择处于比边界线xa上的左上点p1更下方的点即左测点p3代替通常遮光范围b中的边界线xa和边界线ya的交点即左上点p1。左测点p3是基于对向车cv的大小例如对向车cv的车高而选择的点。例如左测点p3的y0轴方向的坐标值预先设定为考虑到作为对向车被假想的大型车的车高而得的最大车高值。作为一例,作为最大车高值设定为3m。需要注意的是,左侧点p3也可以例如考虑对向车的驾驶员的视线位置而设定。灯控制部5基于选择的左测点p3,在道路坐标系x0-y0上规定缩小遮光范围c(第二非照射范围的一例)作为用于使得不向对向车cv照射光的遮光范围。缩小遮光范围c是作为比通常遮光范围b更窄的区域而被规定的遮光范围。灯控制部5基于车身的倾斜角θ等信息将选择的左测点p3的坐标值进行坐标变换,作为二轮车坐标系x1-y1上的坐标值算出。此时,道路坐标系x0-y0中的通常遮光范围b的左测点p3的坐标值(x03,y03)例如作为二轮车坐标系x1-y1中的坐标值(x13,y13)被算出。灯控制部5作为在二轮车坐标系x1-y1中与坐标值(x13,y13)对应的区域,特定在x0轴方向的区域内包含坐标值x13的远光灯配光图案ph的部分图案phf。另外,灯控制部5与上述相同地作为与右下点p2的二轮车坐标系x1-y1上的坐标值(x12,y12)对应的区域,特定远光灯配光图案ph的部分图案phh。灯控制部5将被特定的从部分图案phf到部分图案phh的部分图案phf、phg、phh判断为非照射区域。灯控制部5使与该非照射区域(部分图案phf、phg、phh)对应的单独光源30f、30g、30h为熄灭状态。另一方面,灯控制部5将部分图案phf、phg、phh以外的部分图案pha~phe、以及phi判断为照射区域。灯控制部5使与该照射区域(部分图案pha~phe、phi)对应的单独光源30a~30e、30i为点亮状态。即,在车身处于向右侧倾斜的情况下,通过以缩小遮光范围c的左测点p3和右下点p2为基准设定远光灯配光图案ph的非照射区域,与以通常遮光范围b的左上点p1和右下点p2为基准而设定的非照射区域相比,非照射区域的范围变小。具体地,以通常遮光范围b的左上点p1和右下点p2为基准的非照射区域为4个部分图案phe、phf、phg、phh,与此相对,以缩小遮光范围c的左测点p3和右下点p2为基准的非照射区域变为3个部分图案phf、phg、phh。车身相对于路面的倾斜越大,相对于道路坐标系x0-y0的二轮车坐标系x1-y1的倾斜角θ也变大。因此,在将道路坐标系x0-y0的通常遮光范围b的左上点p1的坐标值(x01,
y01)进行坐标变换而作为二轮车坐标系x1-y1上的坐标值(x11,y11)被算出时,车身的倾斜越大,坐标值(x01,y01)和(x11,y11)的差异也越大。在坐标值(x01,y01)和(x11,y11)的差异变大时,作为与坐标值(x11,y11)对应的区域而被特定的远光灯配光图案ph的部分图案的位置向左方变化,从而判断为非照射区域的部分图案的范围变大。因此,通过基于对向车cv的最大车高值来特定左测点p3的坐标值(x03,y03),从而规定比通常遮光范围b更窄的缩小遮光范围c,能够在将左测点p3的坐标值(x03,y03)进行坐标变换而作为二轮车坐标系x1-y1上的坐标值(x13,y13)算出时减小坐标值(x03,y03)和(x13,y13)的差异,能够减小判断为非照射区域的部分图案的范围。需要注意的是,在本实施方式中,说明了机动二轮车100相对于路面使车身向右倾斜的情形,例如在机动二轮车100相对于路面使车身向左倾斜的情况下,灯控制部5也能够同样地设定远光灯配光图案ph的非照射区域。具体地,在车身向左倾斜的情况下,能够基于对向车cv的最大车高值特定右测点的坐标值,规定比通常遮光范围更窄的缩小遮光范围。如上所述,本实施方式的头灯1具备:光源33;投影透镜31,其将来自光源33的光朝向灯具前方照射而形成规定的远光灯配光图案ph;控制部5,其在感测到车辆外部的对向车cv(对象物的一例)的情况下调节规定的远光灯配光图案ph以包含不向对向车cv照射光的通常遮光范围b(第一非照射范围的一例)。灯控制部5构成为:基于车身处于直行状态情况下规定通常遮光范围b,在车身处于转弯状态的情况下,根据车身的倾斜状态取得对象物的高度信息,并基于高度信息规定比通常遮光范围b更窄的缩小遮光范围c(第二非照射范围的一例),从而调节规定的远光灯配光图案ph以包含缩小遮光范围c代替通常遮光范围b。由此,在机动二轮车100的车身处于倾斜状态下形成的远光灯配光图案ph中,能够尽可能地缩小用于不向对向车cv存在的区域照射光的非照射范围。另外,在本实施方式中,光源33包含并列的多个单独光源30a~30i,远光灯配光图案ph由通过来自多个单独光源30a~30i的光沿着水平方向并列形成的多个部分图案pha~phi构成。灯控制部5通过基于对向车cv的高度信息,使形成部分图案pha~phi中包含缩小遮光范围c的部分图案的单独光源30熄灭,从而形成包含缩小遮光范围c的规定的远光灯配光图案ph。这样能够通过使用led阵列等的简单的结构,形成缩小遮光范围c。(变形例)接着,参照图7a以及图7b,对灯控制部5规定缩小遮光范围c的控制方法的变形例进行说明。在上述实施方式中,灯控制部5基于作为对向车cv的车高而假想的最大车高值(例如3m)来选择左测点p3,规定缩小遮光范围c,但不限于此。例如灯控制部5可以取得由外部传感器7测量的各个对向车cv的车高值,并基于取得的各个车高值选择相对于各个对向车cv的左测点p3,从而规定每个对向车cv的缩小遮光范围c。例如,如图7a所示,在对向车cv1为大型车,取得对向车cv1的车高值h1的情况下,灯控制部5基于取得的车高值h1选择相对于对向车cv1的左测点p3,规定对向车cv1的缩小遮光范围c。例如,如图7b所示,在对向车cv2为小型车,取得比对向车cv1的车高值h1更小的对向车cv2的车高值h2的情况下,灯控制部5基于取得的车高值h2选择相对于对向车cv2的左测点p3,从而规定对向车cv2的缩小遮光范围c。由此,在对向车cv为小型车的情况下,能够规定更小的缩小遮光范围c。
如上所述,根据本变形例中的灯控制部5的控制方法,通过根据对向车cv的高度改变缩小遮光范围c(第二非照射范围),能够实现缩小遮光范围c的进一步狭小化。需要注意的是,遮光对象不限于对向车cv,也可以对前行车进行相同的控制。(第二实施方式)接着,参照图8以及图9,对第二实施方式的头灯101具备的远光灯灯具单元103的构成进行说明。如图8所示,远光灯灯具单元103是投影型的灯具。远光灯灯具单元103具备旋转反射器111(光学部件的一例)、led113(光源的一例)、配置于旋转反射器111前方的投影透镜115(光学部件的一例)。需要注意的是,能够使用el元件或ld元件等半导体发光元件代替led113作为光源。特别地对于用于使后述的配光图案的一部分为非照射的控制,优选能够在短时间精度良好地进行点亮熄灭的光源。投影透镜115的形状可以根据所要求的配光图案或照度分布等配光特性适当选择,能够使用非球面透镜或自由曲面透镜。在本实施方式中,作为投影透镜115使用了凸状的非球面透镜。旋转反射器111由未图示的马达等驱动源以旋转轴r为中心向一个方向旋转。另外,旋转反射器111具备构成为在进行旋转的同时将从led113出射的光反射,形成所需的配光图案的反射面。如图9所示,旋转反射器111具备形状相同的3枚板111a、筒状的旋转部111b。板111a作为反射面发挥功能,设置于旋转部111b的周围。旋转反射器111的旋转轴r为相对于光轴ax倾斜,设置于包含光轴ax和led113的平面内。板111a具有随着以旋转轴r为中心朝向周向,光轴ax和反射面形成的角改变的扭曲的形状。由此,如图9所示使用了led113的光的扫描变得可能。具体地,旋转反射器111构成为:能够通过旋转120度,由led113的光向将前方作为一个方向(水平方向)地扫描1次。即,通过1枚板111a经过led113之前,而车辆前方所需的区域由led113的光扫描1次。在第二实施方式中,灯控制部5也基于车身处于直行状态的情况规定通常遮光范围b,在车身处于转弯状态的情况,根据车身的倾斜状态取得对象物的高度信息,并基于高度信息规定比通常遮光范围b更窄的缩小遮光范围c(第二非照射范围),从而以包含缩小遮光范围c代替通常遮光范围b的方式调节规定远光灯配光图案ph。具体地,灯控制部5基于车身的倾斜角θ的信息将基于对向车cv的高度信息而选择的左测点p3的坐标值进行坐标变换,作为二轮车坐标系x1-y1上的坐标值算出。接着,灯控制部特定远光灯配光图案ph中的一部分的部分图案作为与作为二轮车坐标系x1-y1上的坐标值算出的坐标值对应的区域,并将特定的部分图案判断为非照射区域。接着,灯控制部5通过使led113的点亮熄灭的时刻与旋转反射器111的旋转同步,控制led113和旋转反射器111的动作以使来自led113的光不照射到远光灯配光图案ph中的非照射区域。这样,在具备旋转反射器111的扫描光学系统的远光灯灯具单元103中,也与具备led阵列的第一实施方式的远光灯灯具单元3相同,通过在车身倾斜的情况下基于对向车cv的高度信息规定缩小遮光范围c以代替通常遮光范围b,从而能够尽可能地缩小用于不向对向车cv存在的区域照射光的非照射范围。需要注意的是,可以采用具备电流镜或多面镜的扫描光学系统的远光灯灯具单元以代替旋转反射器111。在该情况下,也能够通过进行与上述相同的控制,取得与第一实施方式以及第二实施方式相同的效果。
(第三实施方式)接着,参照图10对由搭载于机动二轮车100的头灯1形成的第三实施方式的配光图案进行说明。图10示出在配置于灯具前方的规定位置例如灯具前方25m的位置的假想铅直屏幕上形成的配光图案。在图10中,h-h示出水平方向(水平线h),v-v示出垂直方向。另外,图10示出作为对象物的一例的对向车cv。对象物可以包含前行车。在图10中,远光灯配光图案ph是由远光灯灯具单元3形成的配光图案,是配光图案的一例。在图10虽未示出,近光灯配光图案pl是由近光灯灯具单元2形成的配光图案。图10是机动二轮车100形成配光图案的状态,且示出在使车身相对于路面处于倾斜状态下行驶的情况下的配光图案。例如图10示出在机动二轮车100在偏向路面的右侧或向右转的弯道行驶的情况下的配光图案。车身的倾斜角度未限定,例如倾斜角度为10度、20度、30度等。机动二轮车100在偏向路面的左侧的情况或向左转的弯道行驶的情况的配光图案的控制方法,除了左右方向相反之外,与机动二轮车100在偏向路面的右侧的情况或向右转的弯道行驶的情况的配光图案的控制方法相同,因此省略说明。从远光灯灯具单元3照射的光向车辆前方照射,形成远光灯配光图案ph。具体地,远光灯灯具单元3的单独光源30a形成部分图案pha,单独光源30b形成部分图案phb,单独光源30c形成部分图案phc,单独光源30d形成部分图案phd,单独光源30e形成部分图案phe,单独光源30f形成部分图案phf,单独光源30g形成部分图案phg,单独光源30h形成部分图案phh,单独光源30i形成部分图案phi,通过合成该部分图案pha~phi形成远光灯配光图案ph。换言之,远光灯配光图案ph包含多个部分图案pha~phi(范围的一例)。在本实施方式中,远光灯灯具单元3如图4所示具备总共9个单独光源30a~30i,因此如图10所示形成9个部分图案pha~phi。远光灯灯具单元3通过在后述的adb模式中组合各个部分图案pha~phi的形成和不形成,根据对向车cv形成形状不同的多个远光灯配光图案ph。以下对机动二轮车100形成远光灯配光图案ph的同时从使车身相对于路面处于垂直行驶的状态向使车身相对于路面处于倾斜行驶的状态变化的情况进行说明。在机动二轮车100使车身相对于路面倾斜行驶的情况下,随着车身的倾斜远光灯灯具单元3也相对于路面倾斜,因此远光灯配光图案ph相对于水平方向h-h倾斜形成。在图10中,将机动二轮车100使车身相对于路面处于垂直的状态行驶的情况的远光灯配光图案ph
′
以虚线示出,将机动二轮车100使车身相对于路面处于倾斜状态行驶的情况的远光灯配光图案ph以实线示出。在灯控制部5判断出由侧倾角传感器6检测的车身的侧倾角(倾斜)为规定角以上的情况下,灯控制部5将远光灯配光图案ph,作为规定的基准线l以下的区域识别为第一区域s1,作为所述基准线以上的区域识别为第二区域s2。基准线l在车身的左右方向上延伸,是与水平线h平行的线,且在对象物的位置具有距离水平线h规定的高度。接着,对由灯控制部5实行的adb模式进行说明。灯控制部5基于例如外部传感器7取得的环境信息,检测包含对向车cv的存在与否以及对向车cv的存在位置(从机动二轮车100到对向车的距离、假想铅直屏幕中的对向车的位置坐标等)的对向车cv的状况。另外,灯控制部5基于例如侧倾角传感器6取得的车身的倾斜角信息,检测车身的倾斜。另外,灯控制部5基于例如速度传感器8取得的速度信息,检测包含机动二轮车100的行驶和停止在内的机动二轮车100的状况。灯控制部5基于外部传感器7、侧倾角传感器6、以及速度传感器8取
得的信息控制配光图案。在灯控制部5从外部传感器7取得环境信息时,基于该检测结果对远光灯灯具单元3的多个单独光源30的点亮熄灭单独地进行控制。具体地,灯控制部5分别控制远光灯灯具单元3的多个单独光源30以使多个单独光源30a~30i中使用于远光灯配光图案ph的光照射的部分图案的单独光源30为点亮状态,不使用于远光灯配光图案ph的光照射的部分图案的单独光源30为熄灭状态。图10示出在机动二轮车100使车身相对于路面处于倾斜的状态行驶的情况下,对向车cv存在于部分图案phh
′
的位置的情况。部分图案phh
′
是机动二轮车100使车身相对于路面处于垂直状态行驶的情况的远光灯配光图案ph
′
的一部分。在外部传感器7检测到对向车cv的情况下,将该检测结果发送给灯控制部5。从外部传感器7接收了检测结果的灯控制部5分别使远光灯灯具单元3的各个单独光源30点亮或者熄灭。以往,灯控制部5为了防止对对向车cv的驾驶员带来眩光,控制为使与对向车cv存在的部分图案对应的单独光源熄灭。在图10的情况下,灯控制部5使单独光源30h熄灭以使与部分图案phh
′
对应的部分图案phh熄灭。但是,随着车身的倾斜远光灯配光图案ph相对于基准线l倾斜而形成,因此实际上对向车cv不存在于部分图案phh,所以没有必要熄灭单独光源30h。换言之,尽管对对向车cv的驾驶员的眩光没有影响,但以往的车辆用灯具将对应的单独光源30h熄灭以使光不向与对向车cv的位置对应的部分图案phh照射。因此具有以下技术问题:这样的单独光源30h不必要的熄灭给机动二轮车100的驾驶员带来不适。本实施方式的灯控制部5判断各个部分图案pha~phi分别是否只包含作为基准线l以下区域的第一区域s1,以避免单独光源不必要的熄灭。在图10的情况下,部分图案phh、phi只包含第一区域s1,因此灯控制部5控制单独光源30h、30i以使对该部分图案phh、phi继续光的照射。即使对向车cv存在于部分图案phh
′
的位置,不管外部传感器7的检测结果,灯控制部5控制为继续点亮单独光源30h。因为部分图案phh只包含第一区域s1,因此没必要熄灭单独光源30h。需要注意的是在本实施方式中,在部分图案pha~phg不存在对向车cv,因此单独光源30a~30g可以继续点亮。因为即使单独光源30a~30g点亮,也不会给对向车cv的驾驶员带来眩光。通过这样,本实施方式不管外部传感器7的检测结果,对作为基准线l以下区域的第一区域s1继续光的照射,因此能够避免单独光源30不必要的熄灭,给机动二轮车100的驾驶员提供没有不适的配光图案。在某个部分图案包含第一区域s1以及第二区域s2双方的情况、且外部传感器7检测到对向车cv包含于该部分图案的情况下,灯控制部5可以熄灭对应的单独光源以使光不向该部分图案照射,来调节配光图案。图11示出在机动二轮车100使车身相对于路面倾斜的状态行驶的情况下,对向车cv存在于部分图案phf的位置的情况。部分图案phf包含第一区域s1以及第二区域s2双方,且包含对向车cv。外部传感器7检测到对向车cv包含于部分图案phf的情况下,将该检测结果发送给灯控制部5。从外部传感器7接收了检测结果的灯控制部5使对应的单独光源30f熄灭以使对部分图案phf不照射光。通过这样,本实施方式能够对作为基准线l以下的区域的第一区域s1继续光的照射的同时,防止对对向车cv的驾驶员带来眩光。
在对象物为对向车cv或者前行车的任何一方的情况下,基准线l优选为比对向车cv的窗玻璃或者前行车的窗玻璃低。作为窗玻璃例如四轮车的前窗或后窗、二轮车的前护罩。这些窗玻璃可以以树脂或乙烯树脂等不限于玻璃的其他材料形成。在对象物为对向车cv的情况下,基准线l优选为比对向车cv的前窗或者挡风玻璃ws低。即,灯控制部5也可以与外部传感器7的检测结果无关地调节远光灯配光图案ph以使光向比对向车cv的前窗或者挡风玻璃ws低的位置照射。在该情况下,本实施方式防止对对向车cv的驾驶员带来眩光的同时,避免单独光源30的不必要的熄灭,从而能够提供不会给机动二轮车100的驾驶员带来不适的配光图案。在对象物为前行车的情况下,基准线l优选为比前行车的后窗或者标识灯低。基准线l可以比对向的机动车的前照灯低。即,灯控制部5可以调节远光灯配光图案ph以使光向比对向的机动车的前照灯低的位置照射。在该情况下,在本实施方式中,因为基准线l比对向的机动车的前照灯低,所以光不会照射到对向的机动车的驾驶员的脸上,从而能够防止对对向的机动车的驾驶员带来眩光。灯控制部5也可以控制单独光源30f,以使在包含第一区域s1以及第二区域s2双方,且包含对向车cv的部分图案phf中,对部分图案phf中作为基准线l以下的第一区域s1点亮,对部分图案phf中作为基准线l以上的第二区域s2熄灭。即,灯控制部5控制1个单独光源以使向1个部分图案的一部分照射光,不向其他部分照射光。在该情况下远光灯灯具单元优选为具备如下扫描光学系统,即具备旋转反射器等。图12是示出远光灯配光图案的控制方法的流程图。以下,对灯控制部5控制远光灯配光图案ph的方法进行说明。首先,灯控制部5使用侧倾角传感器6判断车身的倾斜是否为规定角以上(step1)。在车身的倾斜小于规定角的情况下(在step1为“否”),灯控制部5回到step1,并定期继续检测直到车身的倾斜为规定角以上。在车身的倾斜为规定角以上的情况下(在step1为“是”),灯控制部5判断部分图案pha~phi分别是否只包含第一区域s1(step2)。在判断为在多个部分图案中有只包含第一区域s1的部分图案的情况下(在step2为“是”),不管外部传感器7的检测结果如何,灯控制部5使对应的单独光源30继续点亮以使对该部分图案继续光的照射(step3)。在图10中,部分图案phh、phi只包含第一区域s1,因此灯控制部5继续单独光源30h、30i的点亮。即使对向车cv存在,也不管外部传感器7的检测结果如何,灯控制部5控制为继续点亮单独光源30h。因为部分图案phh只包含第一区域s1,因此不会对对向车cv的驾驶员带来眩光,没必要熄灭单独光源30h。这样本实施方式能够单独光源30的不必要的熄灭不会进行,提供不会给机动二轮车100的驾驶员带来不适的配光图案。在灯控制部5判断为在多个部分图案pha~phi中有不仅包含第一区域s1,还包含第二区域s2的部分图案的情况下(在step2为“否”),外部传感器7检测对向车cv是否包含于该部分图案(step4)。在外部传感器7未检测到对向车cv的情况下(在step4为“否”),灯控制部5使对应的单独光源30的点亮继续(step5)以使对该部分图案继续光的照射。在图10中,部分图案phe、phf、phg是不仅包含第一区域s1还包含第二区域s2的部分图案,但不包含对向车cv。在该情况下,灯控制部5控制为使单独光源30e、30f、30g继续点
亮以对部分图案phe、phf、phg继续光的照射。通过这样,本实施方式能够对不包含对向车cv的部分图案确保光量,从而能够提高辅助驾驶时的视觉辨识性。在外部传感器7检测到对向车cv的情况下(在step4为“是”),判断为该部分图案是不仅包含第一区域s1还包含第二区域s2的部分图案,且是包含对向车cv的部分图案。在该情况下,灯控制部5使对应的单独光源30熄灭(step6)以对该部分图案不照射光。
79.在图11中,部分图案phf包含第一区域s1以及第二区域s2双方,且对向车cv也包含于该部分图案phf,因此灯控制部5将单独光源30f熄灭。通过这样,本实施方式能够向作为基准线l以下区域的第一区域s1继续光的照射的同时,防止给对向车cv的驾驶员带来眩光。在step3、step5、step6之后,灯控制部5确认是否所有的部分图案已被判断(step7)。在所有的部分图案未被判断的情况下(在step7为“否”),灯控制部5对未被判断的部分图案重复step2~step7。在所有的部分图案pha~phi被判断的情况下(在step7为“是”),形成远光灯配光图案ph,结束本过程。以上,对本发明的实施方式作了说明,但很显然本发明的技术范围不能由本实施方式的说明限定地理解。本实施方式仅仅是一例,本领域技术人员可以理解的是,在权利要求记载的发明范围内,能够有各种各样的实施方式变更。本发明的技术范围应该基于权利要求记载的发明范围以及其等同的范围而决定。在上述实施方式中,灯控制部5、侧倾角传感器6以及外部传感器7示出了收纳于头灯1的灯室内的结构,但不限于该例。灯控制部5、侧倾角传感器6以及外部传感器7可以与头灯1分体地配置。本技术基于2019年12月16日申请的日本专利申请2019-226553号以及2019年12月16日申请的日本专利申请2019-226554号,在此作为参考引入其内容。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1