一种牵引力模式的动物控制机器人系统
1.本发明主要涉及动物行为控制技术领域,特指一种牵引力模式的动物控制机器人系统。
背景技术:
2.目前机器人广泛应用于安防、救援救灾、环境侦查等多个领域,机器人具有可在恶劣环境下执行任务,机动性强,可实现远程遥控控制等优势,但是现有的机器人通常结构系统复杂,集成化程度高,为了提高运动灵活性,往往具有多个驱动关节,这就导致在侦查监视与负载运输任务中,存在能耗大,续航时间较短,研发周期长、与人交互智能性不足、环境适应能力不足等一系列制约等问题;动物在运动、感知、能量供应和环境适应性的天赋,使其在环境侦查、救援救灾、安防等领域仍发挥着较大的作用,而目前的动物机器人大多是基于脑机接口技术控制,即通过刺激动物脑部的不同区域产生相应的行为神经信号,将电极植入动物体内刺激不同肌肉或神经部位产生相应行为,但是其准确性和稳定性仍是亟待解决的问题,距离从走出实验室走向实际应用仍有较长的路要走。
技术实现要素:
3.针对现有技术存在的技术问题,本发明提供一种结构简单、能实现动物行为智能、可靠、稳定控制的牵引力模式的动物控制机器人系统。
4.为解决上述技术问题,本发明采用以下技术方案:
5.一种牵引力模式的动物控制机器人系统,包括头套、牵引组件和鞍结构;所述头套通过牵引组件与鞍结构连接,所述牵引组件包括控制装置、对称布置的牵引绳、牵引杆、驱动机构,所述牵引绳、牵引杆、驱动机构依次相连,所述驱动机构对称设置在控制装置的两端,所述驱动机构通过牵引杆带动牵引绳运动以产生拉力用于控制被控对象运动。
6.作为本发明的进一步改进:所述牵引绳包括对称布置的第一牵引绳和第二牵引绳,所述第一牵引绳和第二牵引绳分别与头套的两端相连。
7.作为本发明的进一步改进:所述牵引杆包括对称布置的第一摇杆和第二摇杆,所述第一摇杆与第一牵引绳相连,所述第二摇杆与第二牵引绳相连。
8.作为本发明的进一步改进:所述驱动机构包括第一驱动机构、第一法兰、第二驱动机构、第三驱动机构、第二法兰和第四驱动机构,所述第一法兰和第二法兰对称设置在所述控制装置外壁的两侧,所述第二驱动机构、第四驱动机构对称设置在所述控制装置内壁的两侧,所述第一驱动机构通过第一法兰与第二驱动机构相连,所述第三驱动机构通过第二法兰与第四驱动机构相连;所述第一摇杆远离第一牵引绳的一端与第一驱动机构相连,所述第二摇杆远离第二牵引绳的一端与第三驱动机构相连。
9.作为本发明的进一步改进:所述鞍结构一端与头套相连,所述鞍结构的另一端对称设置有敲击组件,所述敲击组件包括摇摆杆和驱动件,所述驱动件与摇摆杆相连,所述驱动件带动摇摆杆旋转以对被控对象的两侧进行敲击产生力刺激。
10.作为本发明的进一步改进:所述敲击组件至少为两个,所述敲击组件对称布置在鞍结构的两侧。
11.作为本发明的进一步改进:还包括位姿识别装置,所述位姿识别装置用于监测反馈被控对象的位置和姿态信息。
12.作为本发明的进一步改进:还包括环境识别与远程监控装置,所述环境识别与远程监控装置用于识别和监控周围环境信息并进行反馈。
13.作为本发明的进一步改进:所述控制装置包括控制模块、供电模块、远程通讯模块和定位模块;所述控制模块用于获取各传感器模块的信息执行进行相应的控制指令;所述供电模块用于给系统及驱动机构供电;所述远程通讯模块用于实现控制模块与控制终端之间信息无线传输;所述定位模块用于对被控对象进行导航定位。
14.作为本发明的进一步改进:所述驱动机构为电机、气缸、油缸中的任意一种或多种。
15.与现有技术相比,本发明的优点在于:
16.1、本发明的牵引力模式的动物控制机器人系统,以动物为运动主体,根据动物习性与条件反射形成机制,通过施加物理刺激的方法,对动物的行为进行控制,充分利用了动物的运动技能,通过动物强大的环境适应能力突破现有无人系统的应用限制,同时使用智能控制系统代替人类对动物进行控制,为动物赋能。使动物机器人向目标运动,另外还可以增加操作性负载;通过本发明可实现远程遥控控制的优势,实现对动物行进路线的自主决策与控制。
17.2、本发明的牵引力模式的动物控制机器人系统,设计有牵引组件,牵引组件包括对称布置的牵引绳、牵引杆、驱动机构和控制装置,驱动机构驱动牵引杆前后转动或左右转动,从而带动牵引绳前后移动或者向两侧移动,从而实现对控制被控对象的前进、停止以及转弯等动作,充分利用了动物的运动技能,实现远程对动物赋能使其完成各项动作。
附图说明
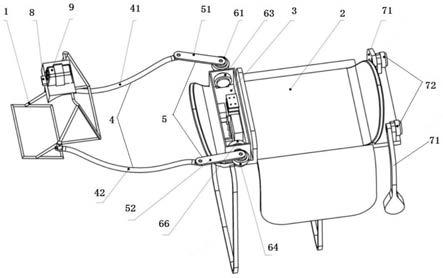
18.图1是本发明的结构示意图。
19.图2是本发明的控制装置的结构示意图。
20.图例说明:
21.1、头套;2、鞍结构;3、控制装置;31、控制模块;32、供电模块;33、远程通讯模块;34、定位模块;4、牵引绳;41、第一牵引绳;42、第二牵引绳;5、牵引杆;51、第一摇杆;52、第二摇杆;61、第一驱动机构;62、第一法兰;63、第二驱动机构;64、第三驱动机构;65、第二法兰;66、第四驱动机构;7、敲击组件;71、摇摆杆;72、驱动件;8、位姿识别装置;9、环境识别与远程监控装置。
具体实施方式
22.以下将结合说明书附图和具体实施例对本发明做进一步详细说明。
23.如图1和图2所示,本发明公开了一种牵引力模式的动物控制机器人系统,包括头套1、牵引组件和鞍结构2,头套1通过牵引组件与鞍结构2连接,牵引组件包括控制装置3、对称布置的牵引绳4、牵引杆5、驱动机构,牵引绳4、牵引杆5、驱动机构依次相连,驱动机构对
称设置在控制装置3的两端,驱动机构通过牵引杆5带动牵引绳4运动以产生拉力用于控制被控对象运动。
24.本实施例的牵引力模式的动物控制机器人系统,设计有牵引组件,牵引组件包括对称布置的牵引绳4、牵引杆5、驱动机构和控制装置3,驱动机构驱动牵引杆5前后转动或左右转动,从而带动牵引绳4前后移动或者向两侧移动,从而实现控制被控对象完成前进、停止以及转弯等动作,充分利用了动物的运动技能,实现远程对动物赋能使其完成各项动作。
25.本实施例中驱动机构为力矩电机,通过力矩电机提供平稳可靠的牵引力,在其他实施例中驱动机构可以为气缸或油缸。
26.本实施例中,牵引绳4包括对称布置的第一牵引绳41和第二牵引绳42,第一牵引绳41和第二牵引绳42分别与头套1的两端相连。通过第一牵引绳41和第二牵引绳42实现控制被控对象完成转弯动作。
27.本实施例中,牵引杆5包括对称布置的第一摇杆51和第二摇杆52,第一摇杆51与第一牵引绳41相连,第二摇杆52与第二牵引绳42相连。驱动机构包括第一驱动机构61、第一法兰62、第二驱动机构63、第三驱动机构64、第二法兰65和第四驱动机构66,第一法兰62和第二法兰65对称设置在控制装置3外壁的两侧,第二驱动机构63、第四驱动机构66对称设置在控制装置3内壁的两侧,第一驱动机构61通过第一法兰62与第二驱动机构63相连,第三驱动机构64通过第二法兰65与第四驱动机构66相连;第一摇杆51远离第一牵引绳41的一端与第一驱动机构61相连,第二摇杆52远离第二牵引绳42的一端与第三驱动机构64相连。
28.具体应用时,控制装置3控制第二驱动机构63运动,通过第一法兰62带动第一驱动机构61前后转动,第一驱动机构61与第一摇杆51相连,通过第一驱动机构61驱动第一摇杆51左右转动,从而实现第一摇杆51前后左右两个自由度运动,进而带动第一牵引绳41前后运动以及向两侧运动。同理,控制装置3控制第四驱动机构66运动,通过第二法兰62带动第三驱动机构64前后转动,第三驱动机构64与第二摇杆52相连,通过第三驱动机构64驱动第二摇杆52左右转动,从而实现第二摇杆52前后左右两个自由度运动,进而带动第二牵引绳42前后运动以及向两侧运动。
29.本实施例中,鞍结构2一端与头套1相连,鞍结构2的另一端对称设置有敲击组件7,敲击组件7包括摇摆杆71和驱动件72,驱动件72与摇摆杆71相连,驱动件72带动摇摆杆71旋转以对被控对象的两侧进行敲击产生力刺激,通过两侧的力刺激驱动被控对象前进。
30.进一步的,在优选实施例中,敲击组件7为两个,对称布置在鞍结构2的两侧。
31.本实施例中,控制装置3包括控制模块31、供电模块32、远程通讯模块33和定位模块34;控制模块31用于获取各传感器模块的信息执行进行相应的控制指令;供电模块32用于给控制系统及驱动机构供电;远程通讯模块33用于实现控制模块31与控制终端之间信息无线传输;定位模块34用于对被控对象进行导航定位。
32.本实施例中,还包括位姿识别装置8,位姿识别装置8用于监测反馈被控对象的位置和姿态信息;还包括环境识别与远程监控装置9,环境识别与远程监控装置9用于识别和监控周围环境信息并进行反馈。
33.本发明的牵引力模式的动物控制机器人系统,以动物为运动主体,根据动物习性与条件反射形成机制,通过施加物理刺激的方法,对动物的行为控制。充分利用了动物的运动技能,通过动物强大的环境适应能力突破现有无人系统的应用限制,同时使用智能控制
系统代替人类对动物进行控制,为动物赋能。一方面使动物机器人向目标运动,另外也可以增加操作性负载;通过本发明可实现远程遥控控制的优势,实现对动物行进路线的自主决策与控制。
34.以上仅是本发明的优选实施方式,本发明的保护范围并不仅局限于上述实施例,凡属于本发明思路下的技术方案均属于本发明的保护范围。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理前提下的若干改进和润饰,应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1