运储可分离自动驾驶物流系统及运行方法与流程
1.本发明涉及物流配送技术领域,具体是运储可分离自动驾驶物流系统及运行方法。
背景技术:
2.随着快递运输行业的发展,快递从业人员的短缺问题越来越严重,使用无人物流车是未来快递、物流的主要发展方向。
3.现有技术中,无人驾驶技术也开始逐渐应用到快递车领域,如京东申请的公开号为cn106338993 a,名称为无人配送车以及无人配送车控制方法和装置的发明专利,涉及物流技术领域,无人配送车包括:车体第一定位天线,第二定位天线,雷达,摄像机和工业控制器,第一定位天线和第二定位天线分别位于车体前部和后部雷达测量车体到障碍物的距离;摄像机采集车体环境图像;工业控制器根据第一定位天线、第二定位天线、雷达和摄像机发送的信息产生控制信号,控制车体的行驶,通过采用天线获取当前的位置信息、采用雷达和摄像机探测周围环境,并采用工业控制器根据获取的信息控制配送车行驶,能够提高物流配送的自动化程度。
4.又如公开号为cn107253601a,名称为“快递自存取式新型蜂巢无人车”的专利,公开了一种快递自存取式新型蜂巢无人车,包括旋转式货物存储系统、设置于所述旋转式货物存储系统的可开闭式舱门、用于将从可开闭式舱门滑出的快件运输到取件口的底部出件输送机构、用于将从存件口存入的快件送入所述旋转式货物存储系统的顶部存件机构;所述的旋转式货物存储系统包括中空筒、分布在所述中空筒外圆的快件存放隔间、外套于所述中空筒的壳体以及用于驱动所述中空筒绕轴线自转的旋转驱动机构;所述可开闭式舱门设置于所述壳体底部。
5.综合分析现有技术发现,目前市场上的无人驾驶物流系统具有如下缺点:1、物流系统中,物流车自动驾驶能力普遍较弱,不能实现全自动驾驶;也不具备在公开道路上进行无人驾驶的能力;2、由于车厢嵌入在车体内,与车体形成一个整体,没有实现车厢本体和车体分离,大大影响了快递运送效率。
技术实现要素:
6.本发明所要解决的技术问题是提供运储可分离自动驾驶物流系统及运行方法,以解决现有技术中存在的缺陷。
7.本发明解决上述技术问题的技术方案如下:
8.一种运储可分离自动驾驶物流系统,包括物流车、可分离货箱、自动驾驶系统及物流运营系统;所述物流管控系统与运营中心进行通信;每个运营中心对应多个配送点,每个配送点对应多个可分离货箱放置点,每个可分离货箱放置点设置多个车库,每个车库均标有车库标识;
9.其中,所述物流车上设置有自动驾驶系统,可实现物流车的无人驾驶;所述可分离
货箱能够实现在物流车上的自动装载和自动卸载;所述物流运营系统包括管控系统及收派件系统,管控系统包括设置于自动驾驶系统中的上位机、物流车的底盘控制器及可分离货箱内的控制系统;可以实现物流车与运营中心之间信息交互,其中,物流车与运营中心之间通过5g、4g或自组网方式实现信息交互;管控系统的控制优先级低于运营中心的控制优先级,物流车将车辆状态、路况信息、快递配送情况实时发送到运营中心,运营中心可以随时查看上述信息、更改物流车任务、紧急接管物流车控制;收派件系统可以实现快件的收发控制;
10.作为上述技术方案的进一步改进,所述物流车包括车身本体及位于车身本体下方的线控底盘,所述线控底盘与底盘控制器连接进行控制;所述线控底盘包括底盘骨架及位于底盘骨架后方下部的车身稳定杆,所述车架上分别具有相应接口与线控转向系统、线控制动系统、线控驻车系统固定连接;还包括线控驱动系统,其通过后悬挂系统固定于车架后方,所述线控驱动系统驱动轮胎转动;所述底盘控制器与线控转向系统、线控制动系统、线控驻车系统通过信号线连接;所述车架的中部设置有为线控底盘提供电源的电池及电池管理系统;所述底盘框架为桁架结构,通过各安装点连接线控转向系统、线控制动系统、线控驻车系统及线控驱动系统;
11.优选的,所述线控制动系统为冗余制动系统;所述电池及电池管理系统中的电池为快换电池包;
12.作为上述技术方案的进一步改进,所述自动驾驶系统设置于物流车顶部,可控制物流车行驶到指定位置;所述自动驾驶系统包括激光雷达、双目摄像头、上位机、毫米波雷达、超声波雷达、组合惯导系统;其中上位机采集激光雷达、双目摄像头、毫米波雷达、超声波雷达的信息并将环境信息、高精度定位与导航结合,传输控制指令给物流车上的底盘控制器,由底盘控制器实现物流车路径导航及自动避障功能;
13.优选的,所述物流车上设置感应装置用于感知可分离货箱放置点,所述感应装置与上位机连接;
14.作为上述技术方案的进一步改进,所述可分离货箱包括快递箱本体和收派件系统,所述收派件系统包括设置于快递箱本体正面的收发快递操作面板及与所述收发快递操作面板连接的控制系统,所述控制系统设置于可分离货箱内部;所述可分离货箱正面设置有货柜格子门,所述控制系统能够根据接收的指令控制相应的货柜格子门进行开关;所述可伸缩支撑结构能够在控制系统控制下进行升降,进而带动可分离货箱升降以便实现自动装卸;
15.优选的,所述可伸缩支撑结构包括运动机构总成,所述运动机构总成包括位于可分离货箱前后两侧的横向电动推杆、上下方向电动推杆和直线导轨,所述横向电动推杆与直线导轨配合实现往复直线运动;所述横向电动推杆连接上下方向电动推杆,所述的横向电动推杆和上下方向电动推杆与可分离货箱内的控制系统连接;其中所述直线导轨的导轨和滑块通过螺栓固定于可分离货箱上;
16.优选的,所述的控制系统包括控制器及与所述控制器连接的无线收发模块,所述无线收发模块接收外部指令来控制可伸缩支撑结构工作;
17.优选的,所述运动机构总成数量为四个,每个运动机构总成均包括一个横向电动推杆和一个上下方向电动推杆,其中横向电动推杆的端部与上下方向电动推杆的中部连
接,每个上下方向电动推杆的两端均与一个直线导轨连接;所述运动机构总成设置于车厢本体前后两端的外侧,所述车厢本体前后两端竖向设置有用于遮挡的伸缩门,所述伸缩门固定于上下方向电动推杆的外侧并随着上下方电动推杆打开和关闭;所述可伸缩支撑结构还包括设置于上下方向电动推杆下端的导向定位块。
18.本发明还公开一种运储可分离自动驾驶物流系统的运行方法,其物流配送模式为:在一个配送区域内,设置配送点一个,小区内可分离货箱放置点若干,可分离货箱放置点放置空的可分离货箱,物流车装载满载快件的可分离货箱从配送点自动驾驶至第一个可分离货箱放置点,并通过自动泊车的方式停在第一个可分离货箱放置点的标记位置,通过自动卸载程序,卸下满载可分离货箱;然后通过同样的自动驾驶方式进入一旁空载可分离货箱下,通过自动加载程序,加载空载可分离货箱,并由物流车自动运回配送中心,进行下一个放置点的自动驾驶配送。
19.本发明的有益效果是:物流车和可分离货箱是可分离的,通过自动控制程序可实现可分离货箱的自动装卸,物流车到达指定地点后可自动卸下可分离货箱,并自动驾驶回到物流中心继续配送其他可分离货箱,通过运营中心控制分布式的配送点的物流车,这样可以大大提高物流配送效率;降低物流的人工成本。
附图说明
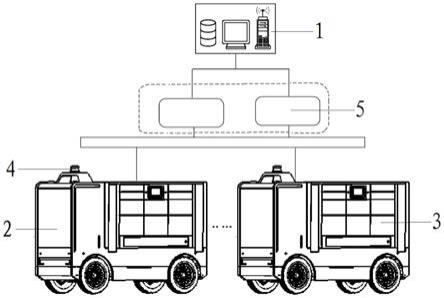
20.图1为本发明整体结构示意图;
21.图2为本发明物流车线控底盘结构示意图一;
22.图3为本发明物流车线控底盘结构示意图二;
23.图4是本发明可分离货箱结构示意图;
24.图5是图4的c
‑
c面剖视图;
25.图6为本发明自动驾驶系统结构示意图;
26.图7为本发明自动装卸流程示意图;
27.1、运营中心,2、物流车,21、底盘骨架,22、线控转向系统,23、线控制动系统,24、线控驻车系统,25、线控驱动系统,26、电池及电池管理系统,27、底盘控制器,3、可分离货箱,31快递箱本体,32、收发快递操作面板,33、货柜格子门,34、可伸缩支撑结构,341、横向电动推杆,342、上下方向电动推杆,343、导轨,344、滑块,345、导向定位块,35、伸缩门,4、自动驾驶系统,41、激光雷达,42、双目摄像头,43、上位机,44、毫米波雷达,45、超声波雷达,46、组合惯导系统,5、配送点;
具体实施方式
28.以下结合附图对本发明的原理和特征进行描述,所举实例只用于解释本发明,并非用于限定本发明的范围。
29.如图1所示,一种运储可分离自动驾驶物流系统,包括物流车2、可分离货箱3、自动驾驶系统4及物流运营系统;所述物流管控系统与运营中心1进行通信;每个运营中心对应多个配送点5,每个配送点对应多个可分离货箱放置点,每个可分离货箱放置点设置多个车库,每个车库均标有车库标识;
30.其中,所述物流车上设置有自动驾驶系统,可实现物流车的无人驾驶;所述可分离
货箱能够实现在物流车上的自动装载和自动卸载;所述物流运营系统包括管控系统及收派件系统,管控系统包括设置于自动驾驶系统中的上位机、物流车的底盘控制器及可分离货箱内的控制系统;可以实现物流车与运营中心之间信息交互,其中,物流车与运营中心之间通过5g、4g或自组网方式实现信息交互;管控系统的控制优先级低于运营中心的控制优先级,物流车将车辆状态、路况信息、快递配送情况实时发送到运营中心,运营中心可以随时查看上述信息、更改物流车任务、紧急接管物流车控制;收派件系统可以实现快件的收发控制;
31.作为上述技术方案的进一步改进,如图2
‑
3所示,所述物流车2包括车身本体及位于车身本体下方的线控底盘,所述线控底盘与底盘控制器27连接进行控制;所述线控底盘包括底盘骨架21及位于底盘骨架21后方下部的车身稳定杆,所述车架上分别具有相应接口与线控转向系统22、线控制动系统23、线控驻车系统24固定连接;还包括线控驱动系统25,其通过后悬挂系统固定于车架后方,所述线控驱动系统驱动轮胎转动;所述底盘控制器与线控转向系统、线控制动系统、线控驻车系统通过信号线连接;所述车架的中部设置有为线控底盘提供电源的电池及电池管理系统26;所述底盘框架为桁架结构,通过各安装点连接线控转向系统、线控制动系统、线控驻车系统及线控驱动系统;
32.优选的,所述线控制动系统23为冗余制动系统;所述电池及电池管理系统26中的电池为快换电池包;
33.作为上述技术方案的进一步改进,如图6所示,所述自动驾驶系统4设置于物流车2顶部,可控制物流车行驶到指定位置;所述自动驾驶系统4包括激光雷达41、双目摄像头42、上位机43、毫米波雷达44、超声波雷达45、组合惯导系统46;其中上位机采集激光雷达、双目摄像头、毫米波雷达、超声波雷达的信息并将环境信息、高精度定位与导航结合,传输控制指令给物流车上的底盘控制器,由底盘控制器实现物流车路径导航及自动避障功能;
34.优选的,所述物流车上设置感应装置用于感知可分离货箱放置点,所述感应装置与上位机连接;
35.作为上述技术方案的进一步改进,如图4所示,所述可分离货箱3包括快递箱本体31和收派件系统,所述收派件系统包括设置于快递箱本体正面的收发快递操作面板32及与所述收发快递操作面板连接的控制系统,所述控制系统设置于可分离货箱内部;所述可分离货箱正面设置有货柜格子门33,所述控制系统能够根据接收的指令控制相应的货柜格子门进行开关;所述可伸缩支撑结构34能够在控制系统控制下进行升降,进而带动可分离货箱升降以便实现自动装卸;
36.优选的,如图5所示,所述可伸缩支撑结构34包括运动机构总成,所述运动机构总成包括位于可分离货箱前后两侧的横向电动推杆341、上下方向电动推杆342和直线导轨,所述横向电动推杆与直线导轨配合实现往复直线运动;所述横向电动推杆341连接上下方向电动推杆342,所述的横向电动推杆和上下方向电动推杆与可分离货箱内的控制系统连接;其中所述直线导轨的导轨343和滑块344通过螺栓固定于可分离货箱上;
37.优选的,所述的控制系统包括控制器及与所述控制器连接的无线收发模块,所述无线收发模块接收外部指令来控制可伸缩支撑结构工作;
38.此处的外部指令包括来自上位机的指令以及来自运营中心的指令,且运营中心的指令优先级高于上位机的指令;
39.优选的,所述运动机构总成数量为四个,每个运动机构总成均包括一个横向电动推杆和一个上下方向电动推杆,其中横向电动推杆的端部与上下方向电动推杆的中部连接,每个上下方向电动推杆的两端均与一个直线导轨连接;所述运动机构总成设置于车厢本体前后两端的外侧,所述车厢本体前后两端竖向设置有用于遮挡的伸缩门35,所述伸缩门固定于上下方向电动推杆的外侧并随着上下方电动推杆打开和关闭;所述可伸缩支撑结构还包括设置于上下方向电动推杆下端的导向定位块345。
40.在本发明中,车厢与物流车之间是分离的,即车厢可以自动装载和卸载。在每一处可分离货箱放置点,均标有车库标识,装有满载快件车厢的自动驾驶物流车通过车身传感器感知车库标识,实时调整车辆位姿,通过自动泊车的方式将满载车厢放在指定放置点,并通过自动卸载的方式将车厢卸下;用同样的传感器,自动驾驶物流车运动到旁边空载车厢处,以自动泊车的方式倒入空载车厢下面,通过自动装载的方式将车厢装起,车厢通过自动锁紧装置与物流车固定,防止在行驶途中跌落,装载空载车厢后,自动驾驶物流车以自动的方式返回物流配送中心;这样就实现了一个配送点的配送任务,具体装卸流程如图7所示。
41.本发明还公开一种运储可分离自动驾驶物流系统的运行方法,其物流配送模式为:在一个配送区域内,设置配送点一个,小区内可分离货箱放置点若干,可分离货箱放置点放置空的可分离货箱,物流车装载满载快件的可分离货箱从配送点自动驾驶至第一个可分离货箱放置点,并通过自动泊车的方式停在第一个可分离货箱放置点的标记位置,通过自动卸载程序,卸下满载可分离货箱;然后通过同样的自动驾驶方式进入一旁空载可分离货箱下,通过自动加载程序,加载空载可分离货箱,并由物流车自动运回配送中心,进行下一个放置点的自动驾驶配送。
42.以上所述仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1