一种四足轮式可变形全方位移动机器人及其控制方法
1.本发明涉及轮足式机器人领域,特别涉及一种具备多种行进模式的四足轮式可变形全方位移动机器人及其控制方法。
背景技术:
2.移动机器人可分为轮式机器人和足式机器人等多种,常用于执行物资运输、抢险救援、安防巡检、侦察打击等任务。轮式机器人具有比足式机器人更快的移动速度,但其复杂环境适应能力较差;反之,足式机器人具有比轮式机器人更高的复杂环境自适应性,但其移动速度较慢。传统的足式机器人只具有腿足行走能力,虽然能克服一些复杂地形,但是在较好的地形条件下行走效率成为一个限制因素。同时,现有的腿足和轮式一体化机器人需要额外的电机驱动,增加了额外的机械质量和体积。因此,为了整合轮式和足式二者之间的优势,如何利用机械结构设计实现足式和轮式行进模式的自由实时切换,同时满足高移动速度和高复杂环境适应性,解决实际的任务需求,具有十分重要的意义。本发明旨在提出一种四足轮式可变形全方位移动机器人及其控制方法,具备足式运动、轮式运动、上下左右前后全方位运动等多种行进模式,以满足复杂任务的需要。
技术实现要素:
3.本发明要解决的问题是设计一种四足轮式可变形全方位移动机器人及其控制方法,同时实现轮式运动的高移动速度和足式运动的高复杂环境适应性,以满足不同地形环境下对行进效率和行进能力的要求。
4.本发明解决其技术问题采用的技术方案是:
5.一种四足轮式可变形全方位移动机器人,其特征在于:它的总体结构由车体,第一、第二、第三和第四腿足支链构成;
6.其中,第一、第二、第三和第四腿足支链的近体电机分别与车体上呈90度排布的支撑座通过螺栓固定连接,四条支链的结构均一致;每条支链的结构如图2所示,它每条支链的近体电机出轴的轴线方向垂直于车体上下表面,通过虎克铰式支架,连接电机的出轴轴线与近体电机的出轴轴线,两条出轴轴线在空间垂直;第一固定支架与连接电机固定在一起,其a孔与末端电机的出轴机械固定在一起;第二固定支架与末端电机通过螺栓紧固,同时安装有多功能足端;
7.基于上述的电机轴线方向配置,它可以通过控制电机转角,使得其工作在轮式状态与足式状态;机器人任没有正反面、前后侧和左右侧之分,除可在足式状态实现传统的全方位四足行走功能外,还可变形成双轮式和球式进行滚动行进;其双轮模式具有两种不同的状态:即对侧抱环轮式模式与单侧抱环轮式模式;双轮式和球式通过节律改变电机转角,可实现不同滚动速度控制和转向控制。
8.一种四足轮式可变形全方位移动机器人控制方法,其控制架构由轮足运动切换、足式运动和轮式运动三大模块组成;足式运动由静动步态选择、姿态感知、步态规划、运动
结算和驱动控制组成;轮式运动由轮式模式选择、姿态感知、转向控制、速度控制和驱动控制组成;
9.其中,轮式模式选择中,按相邻两条腿足支链配对方式,有两种模式;按腿足支链上翻和下翻方式,有两种模式;按变形姿态方式,有对侧抱环轮式模式、单侧抱环轮式模式和球式三种模式;因此,共有十二种轮式模式;
10.姿态感知由安装在车体上的姿态传感器测得,由车体的横滚角、俯仰角、偏航角(α,β,γ)组成;
11.转向控制单侧抱环轮式模式为例,已知期望的和实际偏航角分别为γ
d
,γ,由于双轮模式,整体转速一样,只可以通过双轮半径差异进行转向,且双轮半径差异越大转弯越快,双轮半径的大小主要由四条腿足支链上的连接电机决定,则可设计小车转向控制器为
12.左转:
13.右转:
14.其中,θ0为双轮刚好为一个整圆时四条腿足支链上的连接电机的驱动角度;k
γ
>0为转向控制调节因子,用来控制拐弯速度的快慢,k
γ
越大拐弯速度越快;分别为要实现期望偏航角γ
d
时第一、第二、第三和第四腿足支链的连接电机的驱动角度。
15.速度控制通过姿态感知中的俯仰角β所在的区间,实时控制双轮半径的变大变小实现,已知期望的速度分别为v
d
,当第一、第二腿足支链开始触地时,具体的速度控制器设计为
[0016][0017]
当第三、第四腿足支链开始触地时,具体的速度控制器设计方法相同。其他轮式模式控制器设计与以上步骤相同。
[0018]
本发明和已有技术相比所具有的有益效果:本发明通过特殊的腿部驱动布置,可实现多腿组合形成轮式移动机器人,并自由在正常足式机器人与轮式机器人之间切换,使其具备轮式运动的高移动速度和足式运动的高复杂环境适应性,可针对不同地形采用最高效行进方式,同时由于其不区分正反面、前后侧和左右侧,进一步提升了其稳定性,使该轮式可变形机器人具有广泛的社会运用前景。
附图说明
[0019]
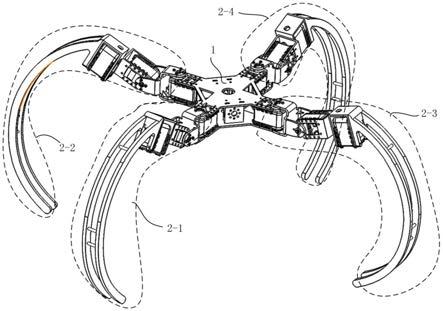
图1四足轮式可变形机器人正常模式示意图;
[0020]
图2腿部支链结构;
[0021]
图3对侧抱环轮式模式;
[0022]
图4单侧抱环轮式模式;
[0023]
图5球式模式;
[0024]
图6机器人控制架构示意图;
[0025]
图7机器人轮式运动控制参数示意图;
[0026]
图8第一、第二固定支架示意图;
[0027]
图9多功能足端示意图;
[0028]
图中:车体(1),第一、第二、第三和第四腿足支链(2
‑
1、2
‑
2、2
‑
3、2
‑
4),近体电机(3
‑
1),连接电机(3
‑
2),末端电机(3
‑
3),虎克式支架(4),第一、第二固定支架(5
‑
1、5
‑
2),多功能足端(6),支撑座(7)
具体实施方式
[0029]
结合附图对本发明做进一步说明。
[0030]
本发明要解决的问题是设计一种四足轮式可变形全方位移动机器人及其控制方法,同时实现轮式运动的高移动速度和足式运动的高复杂环境适应性,以满足不同地形环境下对行进效率和行进能力的要求。
[0031]
本发明解决其技术问题采用的技术方案是:
[0032]
如图1所示,一种四足轮式可变形全方位移动机器人,其特征在于:它的总体结构由车体(1),第一、第二、第三和第四腿足支链(2
‑
1、2
‑
2、2
‑
3、2
‑
4)构成;
[0033]
其中,第一、第二、第三和第四腿足支链(2
‑
1、2
‑
2、2
‑
3、2
‑
4)的近体电机(3
‑
1)分别与车体(1)上呈90度排布的支撑座通过螺栓固定连接,四条支链的结构均一致;每条支链的结构如图2所示,它每条支链的近体电机(3
‑
1)出轴的轴线方向垂直于车体(1)上下表面,通过虎克铰式支架(4),连接电机(3
‑
2)的出轴轴线与近体电机(3
‑
1)的出轴轴线,两条出轴轴线在空间垂直;第一固定支架(5
‑
1)与连接电机(3
‑
2)固定在一起,其a孔与末端电机(3
‑
3)的出轴机械固定在一起;第二固定支架(5
‑
2)与末端电机(3
‑
3)通过螺栓紧固,同时安装有多功能足端(6);
[0034]
基于上述的电机轴线方向配置,它可以通过控制电机转角,使得其工作在轮式状态与足式状态;机器人任没有正反面、前后侧和左右侧之分,除可在足式状态实现传统的全方位四足行走功能外,还可变形成双轮式和球式进行滚动行进;其双轮模式具有两种不同的状态:即对侧抱环轮式模式(见图3)与单侧抱环轮式模式(见图4),其球式如图5所示;双轮式和球式通过节律改变电机转角,可实现不同滚动速度控制和转向控制。
[0035]
一种四足轮式可变形全方位移动机器人控制方法,如图6所示,其控制架构由轮足运动切换、足式运动和轮式运动三大模块组成;足式运动由静动步态选择、姿态感知、步态规划、运动结算和驱动控制组成;轮式运动由轮式模式选择、姿态感知、转向控制、速度控制和驱动控制组成;
[0036]
其中,轮式模式选择中,按相邻两条腿足支链配对方式,有两种模式;如图1所示,按腿足支链上翻和下翻方式,有两种模式;按变形姿态方式,有对侧抱环轮式模式、单侧抱环轮式模式和球式三种模式;因此,共有十二种轮式模式;
[0037]
姿态感知由安装在车体(1)上的姿态传感器测得,由车体的横滚角、俯仰角、偏航角(α,β,γ)组成;
[0038]
转向控制以图7的单侧抱环轮式模式为例,已知期望的和实际偏航角分别为γ
d
,γ,由于双轮模式,整体转速一样,只可以通过双轮半径差异进行转向,且双轮半径差异越
大转弯越快,双轮半径的大小主要由四条腿足支链上的连接电机(3
‑
2)决定,则可设计小车转向控制器为
[0039]
左转:
[0040]
右转:
[0041]
其中,θ0为双轮刚好为一个整圆时四条腿足支链上的连接电机(3
‑
2)的驱动角度;k
γ
>0为转向控制调节因子,用来控制拐弯速度的快慢,k
γ
越大拐弯速度越快;分别为要实现期望偏航角γ
d
时第一、第二、第三和第四腿足支链(2
‑
1、2
‑
2、2
‑
3、2
‑
4)的连接电机(3
‑
2)的驱动角度。
[0042]
速度控制通过姿态感知中的俯仰角β所在的区间,实时控制双轮半径的变大变小实现,已知期望的速度分别为v
d
,当第一、第二腿足支链(2
‑
1、2
‑
2)开始触地时,具体的速度控制器设计为
[0043][0044]
当第三、第四腿足支链(2
‑
3、2
‑
4)开始触地时,具体的速度控制器设计方法相同。其他轮式模式控制器设计与以上步骤相同。
[0045]
本发明和已有技术相比所具有的有益效果:本发明通过特殊的腿部驱动布置,可实现多腿组合形成轮式移动机器人,并自由在正常足式机器人与轮式机器人之间切换,使其具备轮式运动的高移动速度和足式运动的高复杂环境适应性,可针对不同地形采用最高效行进方式,同时由于其不区分正反面、前后侧和左右侧,进一步提升了其稳定性,使该轮式可变形机器人具有广泛的社会运用前景。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1