机械腿模组和机器人的制作方法
本发明涉及智能设备,更具体地,涉及一种机械腿模组和机器人。
背景技术:
1、机器人是通过传动部件来驱动关节的移动或转动,从而实现机身、手臂和手腕等的运动。因此,传动部件是构成机器人的重要部件。常用的直线传动机构一般采用丝杠螺母进行传动,然而,丝杠螺母传动的直线传动机构一般重量很大,且响应速度很慢,导致运动效果较差。
技术实现思路
1、本申请提供了一种机械腿模组和机器人,能够有效减轻重量,且响应迅速,从而提高运动效果。
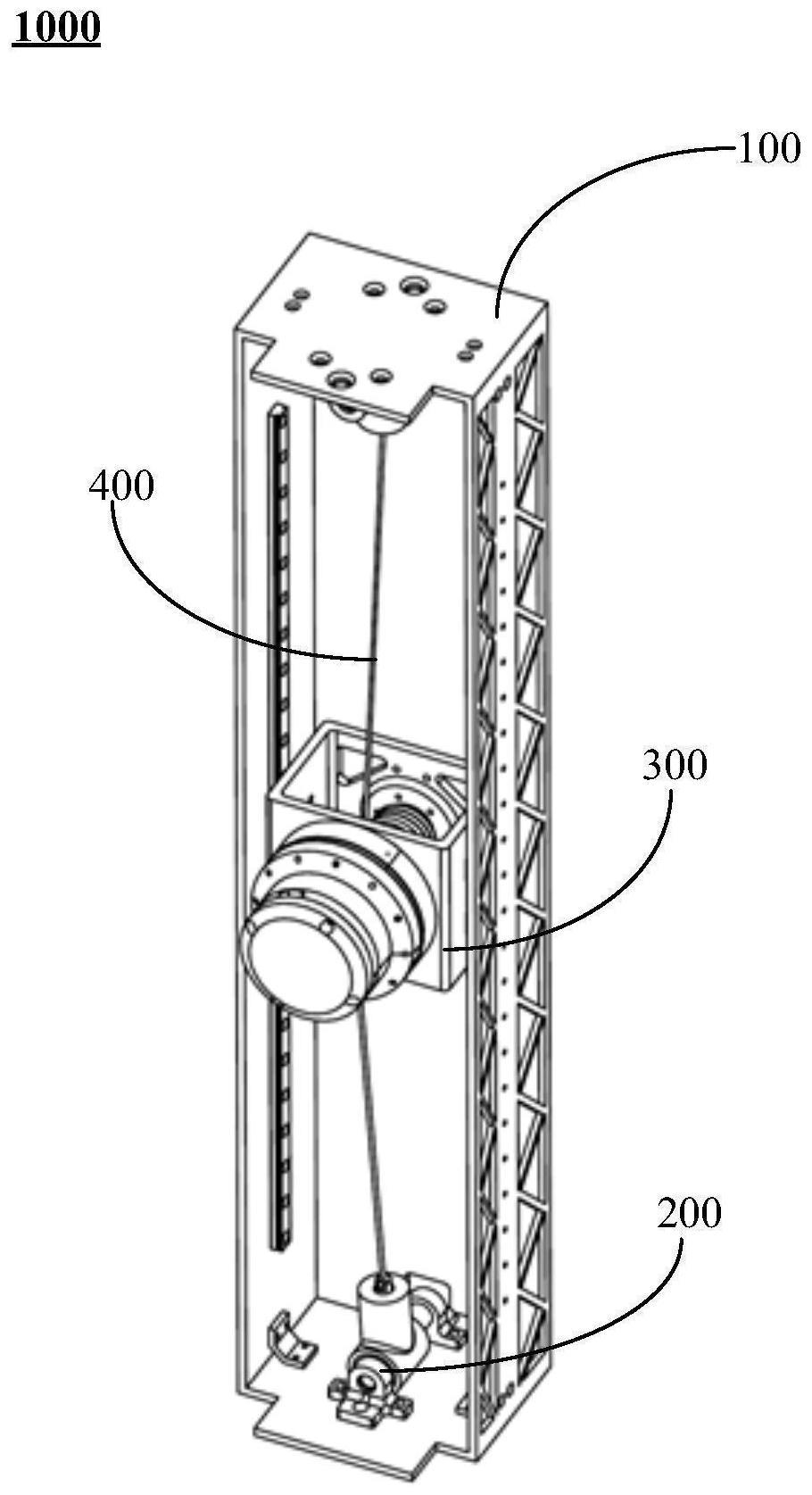
2、第一方面,提供了一种机械腿模组,包括:外壳;
3、游动端,设置有两个所述游动端且对称安装于所述外壳顶部和底部的内侧;
4、驱动组件,连接于所述外壳内的侧面,所述驱动组件包括绳轮;
5、绳索件,所述绳索件经所述绳轮缠绕,且所述绳索件的两端分别固定于所述安装于所述外壳顶部的游动端和所述安装于所述外壳底部的游动端,以使绳索件在所述驱动组件的驱动下,带动所述外壳上下移动。
6、在一些实现方式中,所述驱动组件还包括基座和电机,其中,所述基座连接于所述外壳内的侧面,所述绳轮设置于所述基座的第一连接面和第二连接面之间,所述电机设置于所述第一连接面上、且远离所述绳轮的表面。
7、在一些实现方式中,所述驱动组件还包括减速器,所述减速器固定于所述电机和所述基座之间。
8、在一些实现方式中,所述驱动组件还包括法兰盘,所述法兰盘设置于所述绳轮和所述第一连接面之间,所述法兰盘包括连接孔,所述连接孔用于连接所述绳轮和所述电机。
9、在一些实现方式中,所述基座上设置有凸台,所述凸台上设置有安装孔,所述绳轮经所述安装孔可转动连接于所述基座。
10、在一些实现方式中,所述基座还包括限位模组,所述限位模组包括轴承,所述轴承设置于所述基座和所述绳轮之间,用于连接所述绳轮。
11、在一些实现方式中,所述限位模组还包括第一挡圈和第二挡圈,所述第一挡圈的外径大于所述第二挡圈的外径,所述凸台靠近所述外壳的一面设有空隙,所述空隙用于安装所述第一挡圈和所述第二挡圈,所述第一挡圈的外径大于所述轴承外径,且所述第一挡圈的内径小于所述轴承的外径,所述第二挡圈的外径大于所述轴承的内径,所述绳轮穿过所述第一挡圈安装,所述第二挡圈设置在所述绳轮和所述外壳之间。
12、在一些实现方式中,所述绳轮还包括固定件,用于固定所述绳索件。
13、在一些实现方式中,所述游动端包括支撑部、钢轴、滑动轴承以及连接部;
14、所述钢轴与所述支撑部连接,所述滑动轴承与所述钢轴可活动连接,以沿所述钢轴的长度方向滑动;
15、所述连接部与所述滑动轴承连接,所述连接部用于带动所述绳索件跟随所述滑动轴承运动。
16、在一些实现方式中,所述连接部包括壳部、弹簧内轴以及弹簧,所述弹簧绕设于所述弹簧内轴上,所述壳部的第一端连接于所述滑动轴承,所述弹簧内轴和所述弹簧连接于所述壳部的第二端内,所述弹簧内轴垂直于所述滑动轴承的中心轴,所述弹簧内轴上设置有连接孔,用于固定所述绳索件。
17、第二方面,提供了一种机器人,所述机器人包括如上述第一方面所述的机械腿模组。
18、在一些实现方式中,所述机器人还包括髋关节,设置有两条所述机械腿模组安装于所述髋关节的两侧,所述两条机械腿模组沿所述髋关节轴对称。
19、在一些实现方式中,所述髋关节与所述驱动组件连接。
20、在一些实现方式中,所述驱动组件包括电机,所述电机与所述髋关节连接。
21、本申请实施例的机械腿模组,包括:外壳、游动端、驱动组件以及绳索件,其中,该驱动组件包括绳轮,通过将绳索件缠绕绳轮,且两端分别固定于外壳顶部和外壳底部的游动端,使得机械腿模组可以在绳轮运动时,使绳索件在摩擦力的作用下拉紧,以拉动外壳上下运动。并且,通过绳驱动,可以减轻机械腿模组的重量,提升机械腿模组的响应迅速,达到更好的运动效果。
技术特征:
1.一种机械腿模组,其特征在于,包括:
2.根据权利要求1所述的机械腿模组,其特征在于,所述驱动组件还包括基座和电机,其中,所述基座连接于所述外壳内的侧面,所述绳轮设置于所述基座的第一连接面和第二连接面之间,所述电机设置于所述第一连接面上、且远离所述绳轮的表面。
3.根据权利要求2所述的机械腿模组,其特征在于,所述驱动组件还包括减速器,所述减速器设置于所述电机和所述基座之间。
4.根据权利要求3所述的机械腿模组,其特征在于,所述驱动组件还包括法兰盘,所述法兰盘设置于所述绳轮和所述第一连接面之间,所述法兰盘包括连接孔,所述连接孔用于连接所述绳轮和所述电机。
5.根据权利要求2所述的机械腿模组,其特征在于,所述基座上设置有凸台,所述凸台上设置有安装孔,所述绳轮经所述安装孔可转动连接于所述基座。
6.根据权利要求5所述的机械腿模组,其特征在于,所述基座还包括限位模组,所述限位模组包括轴承,所述轴承设置于所述基座和所述绳轮之间,用于连接所述绳轮。
7.根据权利要求6所述的机械腿模组,其特征在于,所述限位模组还包括第一挡圈和第二挡圈,所述第一挡圈的外径大于所述第二挡圈的外径,所述凸台靠近所述外壳的一面设有空隙,所述空隙用于安装所述第一挡圈和所述第二挡圈,所述第一挡圈的外径大于所述轴承外径,且所述第一挡圈的内径小于所述轴承的外径,所述第二挡圈的外径大于所述轴承的内径,所述绳轮穿过所述第一挡圈安装,所述第二挡圈设置在所述绳轮和所述外壳之间。
8.根据权利要求1所述的机械腿模组,其特征在于,所述绳轮还包括固定件,用于固定所述绳索件。
9.根据权利要求1所述的机械腿模组,其特征在于,所述游动端包括支撑部、钢轴、滑动轴承以及连接部;
10.根据权利要求9所述的机械腿模组,其特征在于,所述连接部包括壳部、弹簧内轴以及弹簧,所述弹簧绕设于所述弹簧内轴上,所述壳部的第一端连接于所述滑动轴承,所述弹簧内轴和所述弹簧连接于所述壳部的第二端内,所述弹簧内轴上设置有连接孔,用于固定所述绳索件,且所述弹簧内轴的轴向与所述绳索件平行。
11.一种机器人,其特征在于,所述机器人包括如权利要求1至10任一项所述的机械腿模组。
12.根据权利要求11所述的机器人,其特征在于,所述机器人还包括髋关节,设置有两条所述机械腿模组安装于所述髋关节的两侧,所述两条机械腿模组沿所述髋关节轴对称。
13.根据权利要求12所述的机器人,其特征在于,所述髋关节与所述驱动组件连接。
14.根据权利要求13所述的机器人,其特征在于,所述驱动组件包括电机,所述电机与所述髋关节连接。
技术总结
提供了一种机械腿模组和机器人,可应用于人工智能、机器人应用、机电一体化等各种应用场景。该机械腿模组包括:外壳、游动端、驱动组件以及绳索件;其中,设置有两个游动端相对安装于外壳顶部和底部的内侧,驱动组件包括绳轮,绳轮固定于所述外壳内的侧面,绳索件经绳轮缠绕且两端分别固定于外壳顶部和外壳底部的游动端,以在驱动组件的驱动下,拉动外壳上下运动,可以有效减轻重量,且响应迅速,从而提高运动效果。
技术研发人员:张东胜,黎雄,于孟驰
受保护的技术使用者:腾讯科技(深圳)有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!