自行车双连杆齿轮传动机构的制作方法
1.本技术方案涉及自行车、三轮车、电动自行车、摩托车动力传递过程中的传动装置,尤其适用于自行车脚蹬杆以及摩托车发动机输出动力后至驱动轮之间的传动部分。
背景技术:
2.目前,自行车脚蹬杆至后轮之间传动、摩托车发动机总成至驱动轮之间的传动机构基本都是滚子链条传动,传动效率在0.9左右,骑行时能耗利用率不高,单向活飞轮与传动链条之间装配精度如果调节不到位,骑行过程还会发生卡顿或链条脱落现象。而且滚子链节大多暴露在空气中,长期在雨雪天气下,链节也容易生锈等缺点。电动自行车的电瓶在骑行半路经常发生电力不足无法开动现象,就要依靠人力脚蹬踩踏骑行,原来使用滚子链条传动限于装配空间关系等原因传动速比较小,设计选择余地不大,因而造成脚蹬踩踏愈加费力,骑行速度慢,如果改用本技术方案传动机构装置,有利于大幅度改善此种现象。另外链传动自从作为自行车摩托车传动件以来,结构几乎一成不变,缺乏新意,虽然也有少量车型使用齿轮轴传动,但因为齿轮轴传动通过2组90度垂直角齿轮传递动力,传动效率甚至低于0.9,用户骑行费力体验感觉差,并且由于自身加工的高精度,组装的高要求,相对的高成本限制了齿轮轴传动的广泛推广应用。
技术实现要素:
3.为了克服现有滚子链条传动机构传动效率低下的缺点,本技术方案提出一种全新结构的双连杆齿轮传动机构。它具有结构简单、传动效率高,达到0.98左右、传动扭矩大、能耗损失小等优点。
4.本技术方案的传动原理是:双连杆齿轮传动机构是由脚蹬转动大齿轮、前端小齿轮和前端传动盘、2根对称分布于传动侧车架两侧的平行转动连杆、后端小齿轮和后端传动盘、单向活飞轮组成。2根传动连杆的平行转动半径和前后端2个传动齿轮与前后端2个传动盘旋转半径相同,将动力传递给单向活飞轮外齿圈带动单向活飞轮,最后将动力传递给与单向活飞轮内圈螺纹连接的后轮毂来带动后轮转动,以此来达到动力传递的目的。为了防止2根传动连杆在动力传递转动过程中发生错位反转现象,传动连杆一在前端传动盘与后端小齿轮上的连接、和传动连杆二在前端小齿轮与后端传动盘上的连接平行转动夹角相差90度安装,2根传动连杆的平行转动半径相同,对称分布于自行车车架传动侧两边,以此来保证动力传递过程中的均衡传动以及防止2根传动连杆在整个动力传递机构转动过程中可能发生的错位反转现象,最后达到同步同向均衡传递动力的目的。
5.本发明解决其技术问题所采取的技术方案是:自行车双连杆齿轮传动机构的动力是由脚蹬杆带动脚蹬大齿轮,再带动前端小齿轮和前端传动盘将动力通过2根传动连杆传递给同向转动的后端小齿轮和后端传动盘,使之同步同向均衡转动,然后将动力传递给单向活飞轮外齿圈,最后由单向活飞轮带动后轮毂转动,以此来达到动力传递的目的。同时为了防止2根传动连杆在动力传递转动期间发生错位反转,传动连杆一在前端传动盘与后端
小齿轮上的连接、和传动连杆二在前端小齿轮与后端传动盘上的连接平行转动夹角相差90度安装,2根传动连杆的平行转动半径相同,对称分布于自行车车架传动侧两边,以此来防止2根传动连杆在转动过程中可能发生的错位反转现象,最后达到同步同向均衡传递动力的目的。
6.本发明的有益效果是:双连杆齿轮传动机构克服了现有滚子链条传动机构传动效率低下,容易生锈,容易脱链等缺点,具有传动效率高,达到0.98左右、动力损失小,传动扭矩大,能轻松满足目前市场上所有自行车、电动自行车、摩托车的动力输出传递要求,而且旋转顺滑,无卡顿现象,同时又具有结构简单轻便,零件数量少,成本低廉等优点。
附图说明
7.下面结合附图对本发明作进一步说明:
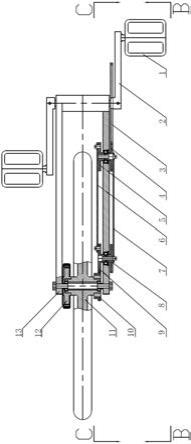
8.图1脚蹬杆水平位置主视图。
9.图2脚蹬杆水平位置俯视图。
10.图3脚蹬杆垂直位置视图。
11.图4脚蹬杆垂直位置俯视图。
12.图5a
‑
a方向剖视图。
13.图6b
‑
b方向剖视图。
14.图7c
‑
c方向剖视图。
15.零部件序号如下:
16.图5:1脚蹬。2脚蹬杆。3脚蹬大齿轮。4前端小齿轮。5前端传动盘。6传动连杆一。7传动连杆二。8后端传动盘。9后端小齿轮。10单向活飞轮。11后轮毂。12后轮抱闸。13自行车架。
具体实施方式
17.一、双连杆齿轮传动机构动力并行传动路线1依次传递过程:
18.在图5中,脚蹬1
→
脚蹬杆2
→
脚蹬大齿轮3
→
前端小齿轮4
→
前端传动盘5
→
传动连杆一6
→
后端小齿轮9
→
单向活飞轮10
→
后轮毂11
19.动力通过脚蹬1带动脚蹬杆2转动,脚蹬杆2与脚蹬大齿轮3紧固连接,因而带动脚蹬大齿轮3旋转使得与之啮合的前端小齿轮4跟着转动,从而带动与之紧固连接的前端传动盘5一起旋转,然后带动传动连杆一6平行转动,再带动后端小齿轮9旋转,然后又带动与之啮合的单向活飞轮10外齿圈旋转,从而带动单向活飞轮10旋转,最后带动与单向活飞轮10内圈螺纹连接的后轮毂11转动,达到输出动力扭矩的目的。
20.二、双连杆齿轮传动机构动力并行传动路线2依次传递过程:
21.在图5中,脚蹬1
→
脚蹬杆2
→
脚蹬大齿轮3
→
前端小齿轮4
→
传动连杆二7
→
后端传动盘8
→
后端小齿轮9
→
单向活飞轮10
→
后轮毂11
22.动力通过脚蹬1带动脚蹬杆2转动,脚蹬杆2与脚蹬大齿轮3紧固连接,因而带动脚蹬大齿轮3旋转使得与之啮合的前端小齿轮4跟着转动,从而带动传动连杆二7平行转动,然后带动后端传动盘8旋转,再带动与之紧固连接的后端小齿轮9一起旋转,然后带动与之啮合的单向活飞轮10外齿圈旋转,从而带动单向活飞轮10旋转,最后带动与单向活飞轮10内
圈螺纹连接的后轮毂11转动,达到输出动力扭矩的目的。
23.三、双连杆齿轮传动机构在动力传递过程中的均衡传动以及防止错位反转限制措施:
24.在图5中,为了防止传动连杆一6和传动连杆二7在动力传递转动过程中发生错位反转现象,传动连杆一6在前端传动盘5与后端小齿轮9上的连接、和传动连杆二7在前端小齿轮4与后端传动盘8上的连接平行转动夹角相差90度安装,传动连杆一6和传动连杆二7平行转动半径相同,并且对称分布于自行车架13传动侧两边,以此来保证动力传递过程中的均衡传动以及防止传动连杆一6和传动连杆二7在整个动力传递机构转动过程中可能发生的错位反转现象,最后达到同步同向均衡传递动力的目的。
技术特征:
1.自行车双连杆齿轮传动机构,其结构由脚蹬带动脚蹬杆、脚蹬大齿轮、前端小齿轮和前端传动盘、传动连杆、后端传动盘和后端小齿轮、单向活飞轮、后轮毂顺序传动连接,其特征是:动力通过脚蹬带动脚蹬杆旋转时转动大齿轮,再带动前端小齿轮和前端传动盘转动,然后通过公转半径与前端小齿轮和前端传动盘旋转半径相同并且同步同向转动的2根平行转动夹角相差90度的连杆带动后端传动盘和后端小齿轮旋转,然后带动单向活飞轮旋转,最后将动力输出到与单向活飞轮内圈螺纹连接的后轮毂驱动后轮转动。2.根据权利要求1所述的自行车双连杆齿轮传动机构,其特征是:动力并行传动路线1在动力传递过程中,动力通过脚蹬带动脚蹬杆转动,脚蹬杆与脚蹬大齿轮紧固连接,因而带动脚蹬大齿轮旋转使得与之啮合的前端小齿轮跟着转动,从而带动与之紧固连接的前端传动盘一起旋转,然后带动传动连杆一平行转动,再带动后端小齿轮旋转,然后又带动与之啮合的单向活飞轮外齿圈旋转,从而带动单向活飞轮旋转,最后带动与单向活飞轮内圈螺纹连接的后轮毂转动,以此来达到动力传递的目的,获得需要设定的输出转速。3.根据权利要求1所述的自行车双连杆齿轮传动机构,其特征是:动力并行传动路线2在动力传递过程中,动力通过脚蹬带动脚蹬杆转动,脚蹬杆与脚蹬大齿轮紧固连接,因而带动脚蹬大齿轮旋转使得与之啮合的前端小齿轮跟着转动,从而带动传动连杆二平行转动,然后带动后端传动盘旋转,再带动与之紧固连接的后端小齿轮一起旋转,然后带动与之啮合的单向活飞轮外齿圈旋转,从而带动单向活飞轮旋转,最后带动与单向活飞轮内圈螺纹连接的后轮毂转动,以此来达到动力传递的目的,获得需要设定的输出转速。4.根据权利要求1所述的自行车双连杆齿轮传动机构,其特征是:传动连杆一在前端传动盘与后端小齿轮上的连接、和传动连杆二在前端小齿轮与后端传动盘上的连接平行转动夹角相差90度安装,传动连杆一和传动连杆二平行转动半径相同,并且对称分布于自行车架传动侧两边,以此来达到动力传递过程中的均衡传动以及防止2根传动连杆在整个动力传递转动过程中可能发生的错位反转现象,起到同步同向均衡传递动力的作用。
技术总结
自行车双连杆齿轮传动机构。参见说明书附图5,双连杆齿轮传动机构是由脚蹬转动大齿轮、2个前后端传动小齿轮、2根传动连杆、2个前后端传动盘和单向活飞轮组成,动力依次由脚蹬向脚蹬杆、大齿轮、前端小齿轮和传动盘、传动连杆、后端小齿轮和传动盘、单向活飞轮传递,最后将动力传递给与单向活飞轮内圈螺纹连接的后轮毂来带动后轮转动。同时为了防止2根传动连杆在动力传递转动过程中发生错位反转,2根传动连杆在各自连接的前后端小齿轮与前后端传动盘上的平行转动夹角相差90度安装,平行转动半径相同并且对称分布于自行车车架传动侧两边,以此来达到动力均衡传递以及防止传动连杆在转动过程中可能发生的错位反转现象。转动过程中可能发生的错位反转现象。转动过程中可能发生的错位反转现象。
技术研发人员:徐宇
受保护的技术使用者:徐宇
技术研发日:2021.02.08
技术公布日:2021/10/23
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1