一种磁吸附机器人的结构的制作方法
1.本实用新型涉及机器人配件技术领域,具体为一种磁吸附机器人的结构。
背景技术:
2.机器人是一种自主工作的智能机器,作为机器人的一类,移动式机器人,具有可在导磁性壁面上灵活爬行,携带工具,完成一定任务的特点,在实际生活中具有广泛的使用用途;
3.针对于磁吸式机器人移动的相关应用,有一篇技术申请号为;cn201920639877.3的一种磁吸式爬壁机器人,其中,该机器人装配有设置在机器人侧面的辅助轮,利用辅助轮,机器人能够配合第一轮体及第二轮体与行进路面形成三点接触,保证了机器人移动时的稳定性,防止机器人发生倾侧;
4.但经分析发现该方案中仍然存在着以下弊端;
5.单单依靠第一行进机构和第二行进机构爬行至较陡的坡路时,此机器人前端极其容易翘起导致掉落,且辅助轮固定在机器人侧面,而机器人在管道、圆柱类物体爬行时,辅助轮无法移动贴合其外表面,导致无法对机器人进行支撑,同时,由于机器人的接收天线大多数固定在某个特定的位置上,机器人远离信号输出端时,信号容易受阻,影响操控。
技术实现要素:
6.本实用新型的目的在于提供一种新的磁吸附机器人的结构,以解决上述背景技术中提出的问题。
7.为实现上述目的,本实用新型提供如下技术方案:一种磁吸附机器人的结构,包括装置主体,所述装置主体的外侧面四周均嵌入设置有第一滚轮,所述装置主体的内部左上角固定连接有plc控制器,所述装置主体的内部右侧固定连接有蓄电池,所述装置主体的左侧面通过螺母固定连接有支撑架,所述装置主体的底端嵌入设置有铁板,所述铁板的内壁上方固定连接有电磁铁,所述装置主体的正面前后两侧中部均活动连接有活动轴,所述装置主体的内部顶端右侧固定连接有电机。
8.优选的,支撑架的内壁前后两侧均开设有滑槽,所述滑槽的内部一侧滑动连接有第二滚轮,所述滑槽的内部顶端固定连接有指针开关。
9.优选的,所述第二滚轮的底端与滑槽之间固定连接有弹簧,所述指针开关的信号输出端与电磁铁的信号接收端信号连接。
10.优选的,活动轴远离装置主体的一侧面固定连接有支撑板,所述支撑板的正面下方固定连接有第三滚轮。
11.优选的,所述活动轴内设有锁止结构,所述第三滚轮的外侧面为内凹圆弧面。
12.优选的,铁板的底端开设有呈横向等距离排列的透气槽。
13.优选的,电机的转动输出端贯穿装置主体顶端固定连接有转动轴,所述转动轴的顶端固定连接有天线,所述天线从下到上向右倾斜十五度。
14.与现有技术相比,本实用新型的有益效果是:
15.1、该种磁吸附机器人的结构,通过安装有指针开关,当此装置移动过程中即将掉落时,第二滚轮会通过弹簧的弹力沿着滑槽向下移动,使得第二滚轮与指针开关分离并触发指针开关控制电磁铁启动,使电磁铁对铁板产生吸力将此装置与当前部位的吸附力增加,使得装置主体不易掉落。
16.2、该种磁吸附机器人的结构,通过安装有活动轴,因此装置放置不同位置移动时,使用者可以通过松动活动轴内设有的锁止结构将支撑板通过活动轴翻转至第三滚轮贴合当前移动部位后再将活动轴内的锁止结构固定,使得第三滚轮能够有效对装置主体两侧进行支撑,并且内凹圆弧面的第三滚轮能够有效贴合具有弧形的道路,增加支撑性以及支撑面。
17.3、该种磁吸附机器人的结构,通过安装有电机,电机转动能够带动转动轴转动,使天线转动,同时倾斜角度的天线使得此装置的天线接收角度能够三百六十度进行调节,有效增加控制性能。
附图说明
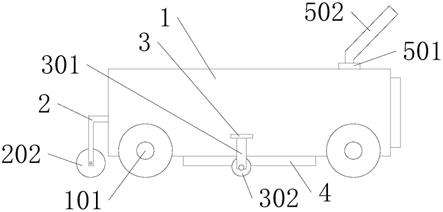
18.图1是本实用新型的整体结构示意图;
19.图2是本实用新型的装置主体局部结构示意图;
20.图3是本实用新型的支撑架局部结构示意图;
21.图4是本实用新型图2的a处放大结构示意图;
22.图5是本实用新型的活动轴局部结构示意图;
23.图中:装置主体1、第一滚轮101、plc控制器102、蓄电池103、支撑架2、滑槽201、第二滚轮202、指针开关203、弹簧204、活动轴3、支撑板301、第三滚轮302、铁板4、电磁铁401、透气槽402、电机5、转动轴501、天线502。
具体实施方式
24.请参阅图1
‑
5,本实施例提供一种技术方案:一种磁吸附机器人的结构,包括装置主体1,装置主体1的外侧面四周均嵌入设置有第一滚轮101,装置主体1的内部左上角固定连接有plc控制器102,装置主体1的内部右侧固定连接有蓄电池103,装置主体1的左侧面通过螺母固定连接有支撑架2,装置主体1的底端嵌入设置有铁板4,铁板4的内壁上方固定连接有电磁铁401,装置主体1的正面前后两侧中部均活动连接有活动轴3,装置主体1的内部顶端右侧固定连接有电机5。
25.进一步的,支撑架2的内壁前后两侧均开设有滑槽201,滑槽201的内部一侧滑动连接有第二滚轮202,滑槽201的内部顶端固定连接有指针开关203。
26.进一步的,第二滚轮202的底端与滑槽201之间固定连接有弹簧204,指针开关203的信号输出端与电磁铁401的信号接收端信号连接,当此装置移动过程中一旦发生掉落时第二滚轮202与路面分离后不受压力的同时第二滚轮202会受弹簧204的弹力沿着滑槽201向下移动进而与指针开关203分离,使得触发指针开关203控制电磁铁401运作,而电磁铁401运作会对铁板4产生吸力使得增加此装置与当前部位的吸附力度,使其不易掉落。
27.进一步的,活动轴3远离装置主体1的一侧面固定连接有支撑板301,支撑板301的
正面下方固定连接有第三滚轮302。
28.进一步的,活动轴3内设有锁止结构,第三滚轮302的外侧面为内凹圆弧面,当此装置在具有弧面的部位移动时,使用者可以松动活动轴3内的锁止结构使支撑板301进行翻转将第三滚轮302贴合至装置主体1前后两侧的路面,再将活动轴3内的锁止结构固定,使得第三滚轮302有效对装置主体1两侧进行支撑,并且内凹圆弧面的第三滚轮302能够增加与圆弧路面的接触面,使得增加对装置主体1移动时的稳定性。
29.进一步的,铁板4的底端开设有呈横向等距离排列的透气槽402,透气槽402能够增加铁板4受电磁铁401运作产生吸力时的透气性,使得增加铁板4的吸附力。
30.进一步的,电机5的转动输出端贯穿装置主体1顶端固定连接有转动轴501,转动轴501的顶端固定连接有天线502,天线502从下到上向右倾斜十五度,当启动电机5转动会带动转动轴501转动,而转动轴501转动会使天线502转动,而倾斜角度的天线502使得信号接收端能够三百六十度调节,有效增加信号的接收强度。
31.其中,电机5的为三百度循环正反旋转。
32.其中,蓄电池103通过电源线与外界电源电性连接,且蓄电池103通过电源线与plc控制器102电性连接,并且plc控制器102通过电源线与指针开关203、电磁铁401、电机5和天线502电连接。
33.其中,plc控制器101是用于装置整体其余电子元件的组合及编程,是实现智能控制的单元。
34.工作原理:
35.首先,使用者将蓄电池103充满电力,然后,当此装置移动过程中一旦发生掉落时第二滚轮202与路面分离后不受压力的同时第二滚轮202会受弹簧204的弹力沿着滑槽201向下移动进而与指针开关203分离,使得触发指针开关203控制电磁铁401运作,而电磁铁401运作对铁板4产生吸力使得此装置贴附在当前位置上,使其不易掉落;
36.接着,当此装置在弧形面的部位移动时,使用者可以松动活动轴3内的锁止结构使支撑板301进行翻转将第三滚轮302贴合至装置主体1前后两侧的路面,再将活动轴3内的锁止结构固定,使得第三滚轮302有效对装置主体1两侧进行支撑,并且内凹圆弧面的第三滚轮302能够增加与圆弧路面的接触面,使得增加对装置主体1移动时的稳定性,最后,当启动电机5转动会带动转动轴501转动,而转动轴501转动会使天线502转动,而倾斜角度的天线502使得信号接收端能够三百六十度调节,有效增加信号的接收强度。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1