一种地摊智能巡检机器人
1.本实用新型涉及一种巡检机器人,尤其涉及一种地摊智能巡检机器人。
背景技术:
2.对于地摊区域现有的管理方式一般是依靠由摄像头以及后台监管人员组成的数字网格系统,外加城管的人工巡逻以及民众举报,但是数字网格系统采用的高清摄像头无法拍摄到地面上发生的一些状况,而人工巡检与举报不能及时的发现状况并对摊主进行及时的提醒纠错,而且由于人工巡检的过程中缺乏及时的取证和监管,会导致一些摊贩恶意抗法或者城管偷懒执法的状况。所以需要在执法系统中介入一款高科技的辅助执法设备。
3.目前,很多辅助执法的机器人都只采用在陆地上巡检的单一运动形式,并不能在空中检测到大范围的执法区域状态。目前市面上还没有这种能同时在陆地上以及空中进行联动巡检的地摊巡检机器人。此外,户外巡检机器人大部分体积和重量较大,通常不易携带或转运。
技术实现要素:
4.为了加大对于地摊摆放状况、人流量的监管力度,同时对违规摆摊的摊主进行及时的提醒纠错以及记录,减少执法过程中的冲突,本实用新型提供了一种可以同时在陆地上以及天空中进行监管,能够对违法违规的人员进行提醒以及记录取证的巡检机器人。
5.本实用新型采用的技术方案是:
6.一种地摊智能巡检机器人,包括机器人本体、无人机、用户智能终端,所述机器人本体包括无人机充电舱、可伸缩及旋转的云台、环境感知组件、控制中心、通信组件、蜂鸣器、可伸缩的拉杆;无人机安置于无人机充电舱内,无人机充电舱具有可开启闭合的舱门;蜂鸣器设置于云台上,环境感知组件用于将采集的环境信息发送至控制中心,控制中心通过通信组件与无人机、用户智能终端进行通信,接收用户智能终端的指令,通过蜂鸣器发送语音提醒;所述的可伸缩的拉杆设置于机器人本体表面,以供用户将其拉出从而牵引巡检机器人。
7.进一步的,所述的环境感知组件包括气敏传感器、高清摄像头、红外摄像头、激光雷达传感器、超声波避障传感器,气敏传感器设于机器人本体内部,高清摄像头、红外摄像头安装在云台上,激光雷达传感器设置于机器人本体前侧,超声波避障传感器设置于机器人本体四周。
8.进一步的,所述的通信模块包括语音通讯模块、蓝牙模块以及无线连接模块。
9.进一步的,所述的机器人本体还包括可升降的车轮。
10.进一步的,所述的机器人本体还包括定位芯片。
11.进一步的,所述的机器人本体还包括照明组件。
12.本实用新型的有益效果是:
13.本实用新型的地摊巡检机器人将无人机与陆上巡检机器人、城管执法人员结合在
一起,可以实现对地摊场景的实时监管、提醒以及对违规状况的记录与取证,此外,该地摊巡检机器人还可以由用户牵引移动,便于用户携带及转运。
附图说明
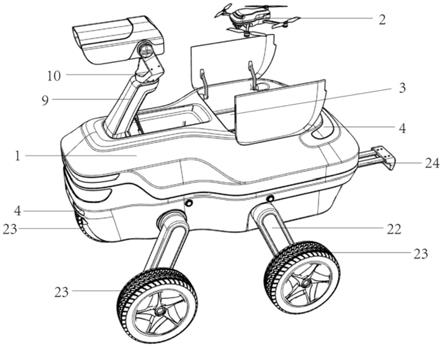
14.图1是本实用新型巡检机器人的一种整体结构实例示意图。
15.图2是本实用新型巡检机器人的一种内部结构实例示意图。
具体实施方式
16.本实用新型的地摊智能巡检机器人,包括机器人本体1、无人机2、用户智能终端(图中未画出),所述机器人本体1包括无人机充电舱3、可伸缩及旋转的云台10、环境感知组件、控制中心、通信组件、蜂鸣器13、可伸缩的拉杆24;
17.无人机安置于无人机充电舱内,无人机充电舱具有可开启闭合的舱门;蜂鸣器设置于云台上,环境感知组件用于将采集的环境信息发送至控制中心,控制中心通过通信组件与无人机、用户智能终端进行通信,接收用户智能终端的指令,通过蜂鸣器发送语音提醒;所述的可伸缩的拉杆设置于机器人本体表面,以供用户将其拉出从而牵引巡检机器人。
18.下面结合具体实例对本实用新型的技术方案做进一步的详细说明。
19.参照图1和图2,为本实用新型的一种地摊智能巡检机器人具体实例,包括机器人本体1,无人机2,无人机充电舱3,照明灯4,气敏传感器5,控制电路6,微型电脑7,旋转电机8,伸缩臂9,云台10,高清摄像头11,红外摄像头 12,蜂鸣器13,激光雷达传感器14,超声波避障传感器15,语音通讯模块16,蓝牙模块17,无线连接模块18,定位芯片19,蓄电池20,驱动装置21,车轮伸缩机构22,车轮23,可伸缩拉杆24。
20.其中气敏传感器、微型电脑、控制电路、蓄电池、驱动装置、语音通讯模块、蓝牙模块、无线连接模块、定位芯片均位于机器人本体内部,所述无人机位于无人机充电舱内部,所述无人机充电舱内部带有充电口,进一步,无人机下方有插口以便无人机进行返航充电,高清摄像头、红外摄像头安装在云台上,云台通过旋转电机8和伸缩臂9实现伸缩和旋转,以便进行良好的拍摄监管。所述蜂鸣器位于云台后方,以便于向摊主发送语音信息,所述激光雷达传感器位于机器人本体前方,所述超声波避障传感器位于机器人本体的前后以及两侧。在本实例中所述驱动装置、车轮伸缩机构、车轮构成可升降车轮,也可采用现有的任一种可升降车轮结构实现;所述可伸缩拉杆位于机器人本体尾部下方。
21.本实用新型使用时,相关执法人员先携带机器人在执法区域进行自主建图,其中的驱动装置带动车轮转动,车轮伸缩机构22在遇到障碍物时可以使机器人本体发生升降以躲避障碍物。其中的高清摄像头11、红外摄像头12、激光雷达传感器14、超声波避障传感器15用于获取图像信息,其中的微型电脑7和控制电路6用于识别图像和建立区域地图。执法人员在携带机器人进行巡检时,用手机(即用户智能终端)与机器人本体进行连接,其中的蓝牙模块17以及无线连接模块18用于与手机进行连接,其中的高清摄像头11、激光雷达传感器14、超声波避障传感器15用于检测前方人流量的状况,在人流量较小的状况下,其中的微型电脑7控制无人机充电舱3开启舱门,释放出无人机2进行监测,同时旋转电机8及伸缩臂9带动云台10升起及旋转,便于监测地摊的摊位状况。当无人机2监测到某区域人流量较大时,可以通过无线连接模块18向微型电脑7传输信息,微型电脑获取无人机的位置信息,
通过无线连接模块18向执法人员的手机传送信号,提醒执法人员前往相关地点进行执法。当微型电脑7根据高清摄像头11、激光雷达传感器14、超声波避障传感器15等获取的信息判断有摊主违规摆摊时,通过无线连接模块18向执法人员发送信息,执法人员在手机上选择语音提醒操作后,微型电脑7通过无线连接模块18激活语音通讯模块16,执法人员通过手机远程向违规摊主进行警告,微型电脑7通过语音通讯模块16接收到信号后利用蜂鸣器13将执法人员的语音播放给违规摊主达到提醒的作用。
22.气敏传感器5用于测试空气中的一氧化碳含量,并转化为电信号,微型电脑 7通过电信号判断空气中的一氧化碳是否超标,如果微型电脑判断出以上物质超标,会通过蜂鸣器13向周围摊主进行提醒,同时微型电脑通过无线连接模块18、向执法人员发送提醒以及定位芯片19确定的位置信息。
23.此外,高清摄像头可以记录其中的执法过程并进行存储,起到记录取证的作用。微型电脑可以将各种违法信息通过无线连接模块18向后台发送信号,后台建立各个摊主的违法违规档案,以便执法人员进行日后的追责。
24.执法过程中,当无人机电量小于20%时,会通过无线连接模块18向微型电脑7发送信号,微型电脑7向无人机充电舱3发送开启命令,无人机充电舱舱门开启,无人机采取自动返航技术飞回无人机充电舱进行充电,无人机充电舱中的充电口接收到无人机正在充电的状态,向微型电脑发送信号,微型电脑再次向无人机充电舱发送命令,无人机充电舱舱门关闭。执法过程中,微型电脑判断蓄电池20电量,如果判断到蓄电池20电量小于总电量的20%时,微型电脑7会向机器人本体1发送信号,其中的激光雷达传感器14、超声波避障传感器15辅助机器人本体1靠边暂停巡检,并控制云台10下降。执法结束时,执法人员利用手机向机器人本体1发送跟随巡检信号,机器人通过高清摄像头、红外摄像头、激光雷达传感器、超声波避障15传感器进行跟随巡检,此外,执法人员也可以拉出其中的可伸缩拉杆24,将机器人拖回巡逻点。
25.本实施例中所涉及的各个部件可以采用现有技术中的相应部件实现,均可在市场购得,对其具体型号不做进一步限定。
26.本说明书实施例所述的内容仅仅是对发明构思的实现形式的列举,本实用新型的保护范围不应当被视为仅限于实施例所陈述的具体形式,本实用新型的保护范围也及于本领域技术人员根据本实用新型构思所能够想到的等同技术手段。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1