一种用于不同壁面附着的仿生抓取装置
1.本实用新型涉及机器人技术领域,尤其涉及的是一种用于不同壁面附着的仿生抓取装置。
背景技术:
2.近年来,机器人在多种壁面上的稳定爬行成为爬壁机器人邻域研究的重点之一。目前,针对单一的壁面(粗糙或光滑壁面),世界各国研究人员研发了多款仿生爬壁机器人。然而,现有的爬壁机器人大多只能在单一类型壁面上攀爬,不能实现多种附着方式的协同应用,未能很好地解决在不同壁面上运动时的稳定性和适应性问题。
技术实现要素:
3.本实用新型的目的在于克服现有技术的不足,提供了一种用于不同壁面附着的仿生抓取装置,以实现既能在粗糙壁面上有效附着又能在光滑壁面上有效附着且能在两者之间便捷切换。
4.本实用新型是通过以下技术方案实现的:
5.一种用于不同壁面附着的仿生抓取装置,包括安装架,所述安装架左右两侧分别设有分足机构;
6.每个分足机构包括分足以及四杆机构,分足包括分足架,分足架通过四杆机构与安装架相连接,分足架上安装有仿生抓附组件以及仿生黏附组件,仿生黏附组件固定设置在分足架底部且向下凸出于分足架,仿生抓附组件包括沿前后方向依次重叠排列且相互独立的多个钩爪片,钩爪片的底部靠近外端的部位设有一个底部向内倾斜的钩刺,分足架上设有提拉部件,自然状态下,钩爪片的钩刺向下凸出于仿生黏附组件的底部;通过提拉部件动作,能带动各个钩爪片向上移动,从而带动各个钩爪片上的钩刺向上抬升至仿生黏附组件的底部之上。
7.进一步的,所述分足架前后两侧分别设有前后两个侧板,每个侧板上开有安装孔和腰形孔,钩爪片上开有一个固定孔和一个限位槽,通过一根固定轴从前向后依次穿过多个钩爪片上的固定孔,并将固定轴的前后两端分别穿出两个侧板上的安装孔,实现对多个钩爪片在分足架上的转动安装;通过一根限位轴从前向后依次穿过多个钩爪片上的限位槽,并将限位轴的前后两端分别穿出两个侧板上的腰形孔,实现对多个钩爪片的限位;所述提拉部件为形状记忆弹簧,两个侧板外侧分别设有形状记忆弹簧,形状记忆弹簧上端固定在侧板上,形状记忆弹簧的下端与限位轴固定,通过形状记忆弹簧通电收缩,从而带动限位轴沿着腰形孔上移,进而带动多个钩爪片绕着固定轴向上翻转,实现钩爪片上的钩刺抬升。
8.进一步的,所述仿生黏附组件包括黏附气囊、以及与黏附气囊上端固定的气囊固定板,气囊固定板固定在分足架上,黏附气囊表面设有一层黏附材料层,黏附气囊内部气腔中填充有颗粒物,黏附气囊一侧设有与气腔连通的气嘴。
9.进一步的,所述钩爪片包括刚性主体以及在刚性主体表面凹陷部分浇注成型的柔
性部件,刚性主体顶端设有一个向外延伸的悬臂,悬臂外端设有辅助连接块,悬臂为柔性材料制成,辅助连接块为刚性部件,辅助连接块上开有辅助孔,通过一根辅助轴从前向后依次穿过多个钩爪片上的辅助孔,并将辅助轴的前后两端分别穿出两个侧板上的辅助安装孔,实现钩爪片与分足架的辅助安装。
10.进一步的,所述安装架上设有一个驱动机构,通过驱动机构驱动两个分足机构的四杆机构同步运动,从而带动两个分足同步运动,进而实现两个分足的抓附或脱附动作。
11.进一步的,所述四杆机构包括首尾依次铰接的固定杆、第一连架杆、连杆、第二连架杆,所述固定杆与安装架固定连接或直接由安装架的一部分构成,所述第一连架杆的一端和第二连架杆的一端分别与固定杆两端铰接,所述第一连架杆的另一端和第二连架杆的另一端分别与连杆两端铰接,所述连杆在远离安装架的一端设有向外延伸的延伸部,分足的分足架安装在延伸部上。
12.进一步的,所述驱动机构包括驱动器、主动齿轮、从动齿轮、第一工作齿轮、第二工作齿轮,主动齿轮与驱动器的输出轴固定连接,主动齿轮和从动齿轮均为锥齿轮且两者相互啮合,第一工作齿轮与从动齿轮同轴固定连接,第一工作齿轮与第二工作齿轮相啮合,两个工作齿轮的齿轮轴分别与两个分足机构的第一连架杆固定连接。
13.本实用新型相比现有技术具有以下优点:
14.1、本实用新型提供的一种用于不同壁面附着的仿生抓取装置,其将仿生抓附组件以及仿生黏附组件集成在一起,既能实现在粗糙壁面上有效附着,又能实现在光滑壁面上有效附着,即实现了在两种壁面上的有效附着。
15.2、本实用新型提供的一种用于不同壁面附着的仿生抓取装置,通过采用形状记忆弹簧作为提拉部件,利用形状记忆弹簧通电和断电的伸缩变形来实现对仿生抓附组件的提拉与否,从而控制仿生黏附组件裸露与否,从而实现了粗糙壁面附着与光滑壁面附着的自动、快速切换。
16.3、本实用新型提供的一种用于不同壁面附着的仿生抓取装置,其仿生抓附组件采用左右两个分足机构以对抓的形式与粗糙壁面形成稳定抓附,能实现在垂直壁面、倾斜壁面、甚至是天花板上的稳定抓附和脱附。
17.4、本实用新型提供的一种用于不同壁面附着的仿生抓取装置,其仿生黏附组件采用表面设有一层黏附材料层的黏附气囊,配合着黏附气囊内部气腔中填充的颗粒物,通过控黏附气囊内部气腔中的气压大小,即可实现在光滑壁面上的有效附着或脱附。
18.5、本实用新型提供的一种用于不同壁面附着的仿生抓取装置,其采用同一个驱动机构即可驱动两个分足机构同步动作,增加了两个分足动作的一致性,同时也仅需一个驱动机构,节约了能源,减轻了重量;且通过控制驱动器间隔性的正转与反转,即可实现抓附与脱附动作的紧凑衔接,从而保证了整个攀爬过程的连贯性。
附图说明
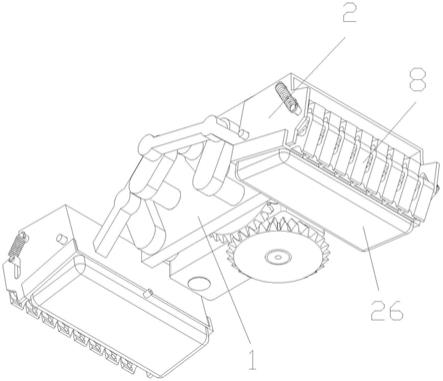
19.图1是本实用新型的整体立体图。
20.图2是本实用新型的单个分足机构的立体图。
21.图3是本实用新型的仿生抓附组件发挥作用时的分足机构的主视图。
22.图4是本实用新型的仿生黏附组件发挥作用时的分足机构的主视图。
23.图5是本实用新型的钩爪片的主视图。
24.图6是本实用新型的仿生黏附组件的立体图。
25.图7是本实用新型的驱动机构的立体图。
26.图中标号:1安装架;2分足机构;3分足架;4第一连架杆;5连杆;6第二连架杆;7延伸部;8钩爪片;9钩刺;10固定孔;11限位槽;12固定轴;13腰形孔;14限位轴;15形状记忆弹簧;16刚性主体;17柔性部件;18悬臂;19辅助连接块;20辅助孔;21驱动器;22主动齿轮;23从动齿轮;24第一工作齿轮;25第二工作齿轮;26黏附气囊;27气囊固定板;28气嘴。
具体实施方式
27.下面对本实用新型的实施例作详细说明,本实施例在以本实用新型技术方案为前提下进行实施,给出了详细的实施方式和具体的操作过程,但本实用新型的保护范围不限于下述的实施例。
28.参见图1至图7,本实施例公开了一种用于不同壁面附着的仿生抓取装置,包括安装架1,安装架1左右两侧分别设有分足机构2。
29.每个分足机构2包括分足以及四杆机构,分足包括分足架3,分足架3通过四杆机构与安装架1相连接,四杆机构包括首尾依次铰接的固定杆、第一连架杆4、连杆5、第二连架杆6,固定杆与安装架1固定连接或直接由安装架1的一部分构成,本实施例中固定杆由安装架1的一部分构成。第一连架杆4的一端和第二连架杆6的一端分别与固定杆两端铰接,第一连架杆4的另一端和第二连架杆6的另一端分别与连杆5两端铰接,连杆5在远离安装架1的一端设有向外延伸的延伸部7,分足的分足架3固定安装在延伸部7上。分足架3上安装有仿生抓附组件以及仿生黏附组件,仿生黏附组件固定设置在分足架3底部且向下凸出于分足架3,仿生抓附组件包括沿前后方向依次重叠排列且相互独立的多个钩爪片8,钩爪片8的底部靠近外端的部位设有一个底部向内倾斜的钩刺9,分足架3上设有提拉部件,自然状态下,钩爪片8的钩刺9向下凸出于仿生黏附组件的底部;通过提拉部件动作,能带动各个钩爪片8向上移动,从而带动各个钩爪片8上的钩刺9向上抬升至仿生黏附组件的底部之上。
30.分足架3整体呈u形框架结构,分足架3包括背板和位于背板前后两侧的侧板,多个钩爪片8位于背板和两个侧板围成的空间内。每个侧板上开有安装孔和腰形孔13,钩爪片8上开有一个固定孔10和一个限位槽11,通过一根固定轴12从前向后依次穿过多个钩爪片8上的固定孔10,并将固定轴12的前后两端分别穿出两个侧板上的安装孔,实现对多个钩爪片8在分足架3上的转动安装;通过一根限位轴14从前向后依次穿过多个钩爪片8上的限位槽11,并将限位轴14的前后两端分别穿出两个侧板上的腰形孔13,实现对多个钩爪片8的限位;提拉部件为形状记忆弹簧15,两个侧板外侧分别设有形状记忆弹簧15,形状记忆弹簧15上端固定在侧板上,形状记忆弹簧15的下端与限位轴14固定,通过形状记忆弹簧15通电收缩,从而带动限位轴14沿着腰形孔13上移,进而带动多个钩爪片8绕着固定轴12向上翻转,实现钩爪片8上的钩刺9抬升。
31.钩爪片8包括刚性主体16以及在刚性主体16表面凹陷部分浇注成型的柔性部件17,刚性主体16顶端设有一个向外延伸的悬臂18,悬臂18外端设有辅助连接块19,悬臂18为柔性材料制成,辅助连接块19为刚性部件,辅助连接块19上开有辅助孔20,通过一根辅助轴从前向后依次穿过多个钩爪片8上的辅助孔20,并将辅助轴的前后两端分别穿出两个侧板
上的辅助安装孔,实现钩爪片8与分足架3的辅助安装。此处,辅助连接块19通过柔性的悬臂18与刚性主体16相连接,柔性的悬臂18具有一定的弹性,当钩爪片8绕着固定轴12翻转时,该柔性的悬臂18可以发生弹性形变,不会阻碍钩爪片8的翻转动作,保证了钩爪片8的正常翻转。
32.安装架1上设有一个驱动机构,通过驱动机构驱动两个分足机构2的四杆机构同步运动,从而带动两个分足同步运动,进而实现两个分足的抓附或脱附动作。驱动机构包括驱动器21、主动齿轮22、从动齿轮23、第一工作齿轮24、第二工作齿轮25,主动齿轮22与驱动器21的输出轴固定连接,主动齿轮22和从动齿轮23均为锥齿轮且两者相互啮合,第一工作齿轮24与从动齿轮23同轴固定连接,第一工作齿轮24与第二工作齿轮25相啮合,两个工作齿轮的齿轮轴分别与两个分足机构2的第一连架杆4固定连接。驱动器21可以采用舵机、直流电机或步进电机中的任一种,通过驱动器21带动主动齿轮22旋转,主动齿轮22带动与其啮合的从动齿轮23旋转,从动齿轮23带动第一工作齿轮24同步转动,第一工作齿轮24再带动与其啮合的第二工作齿轮25转动,通过两个工作齿轮分别带动两组四杆机构同步运动,进而带动左右两个分足同步运动,进而实现两个分足与壁面的抓附和脱附动作。
33.仿生黏附组件包括黏附气囊26、以及与黏附气囊26上端固定的气囊固定板27,气囊固定板27固定在分足架3的两个侧板上,黏附气囊26表面设有一层黏附材料层,黏附气囊26内部气腔中填充有颗粒物,黏附气囊26一侧设有与气腔连通的气嘴28,通过气嘴28对黏附气囊26进行抽气或充气。其中,黏附材料层可采用聚二甲基硅氧烷材料制成,颗粒物可采用石英砂颗粒。仿生黏附组件的吸附和脱附原理为:
34.初始状态下,黏附气囊26内外压差近乎为零,黏附气囊26内颗粒物处于散乱排列堆积状态,黏附气囊26整体刚度较小,具有较好的表面适应性。此时外加按压力,让黏附气囊26表面与壁面自适应的充分接触。随后,对黏附气囊26抽气,降低黏附气囊26内部气腔的气压,使得黏附气囊26内部颗粒物在数目不变、物理性质不变的情况下从体相上表现出紧促的状态,此时黏附气囊26整体弹性模量、刚度增大,即发生颗粒物阻塞效应,黏附气囊26通过表面的黏附材料层与壁面有效黏附,保持一定的气压,即可保持黏附状态。当需要脱附时,向黏附气囊26充气直至其气压与外界大气压相等,此时黏附气囊26内部颗粒物恢复至初始状态,黏附气囊26通过表面的黏附材料层与壁面脱附。即通过控制黏附气囊26内部气腔中的气压大小,即可实现在光滑壁面上的有效附着或脱附。
35.本实施例提供的仿生抓取装置的工作过程为:
36.当壁面为粗糙壁面时,形状记忆弹簧15不通电,此时形状记忆弹簧15处于拉伸状态,限位轴14位于腰形孔13的底端,钩爪片8的钩刺9向下凸出于仿生黏附组件的底部,此时由仿生抓附组件发挥作用。抓附时,由驱动机构驱动两组四杆机构动作,带动两组分足同时动作,在丝杆机构的带动下,每组分足的运动轨迹呈d字形,分足由高点慢慢下落,钩爪片8阵列以一定角度慢慢与粗糙壁面接触,并在壁面上拖动一段距离,待各钩爪片8的钩刺9成功与壁面的突起锁合时,完成一次抓附,此时两个分足以对抓的形式与壁面形成稳定抓附。脱附时,驱动器21反向转动相同的角度,分足机构2以一定角度从壁面脱附,并运动到最高点,等待下一次的抓附动作。这样就完成了一次成功的抓附和脱附动作。
37.当壁面为光滑壁面时,形状记忆弹簧15通电收缩,带动限位轴14沿着腰形孔13上移,限位轴14再带动多个钩爪片8绕着固定轴12向上翻转,从而抬升钩爪片8上的钩刺9,使
得各个钩爪片8上的钩刺9向上抬升至仿生黏附组件的底部之上,即可切换为由仿生黏附组件发挥作用。此时黏附气囊26与壁面接触,通过控黏附气囊26内部气腔中的气压大小,即可实现在光滑壁面上的有效附着或脱附。
38.以上仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1