可调节高度的传感器顶部的制作方法
1.车辆诸如拖拉机等通常包括顶部以保护坐在顶部下方的操作者。一些车辆另外包括用于对车辆的周围事物进行感测的传感器。
附图说明
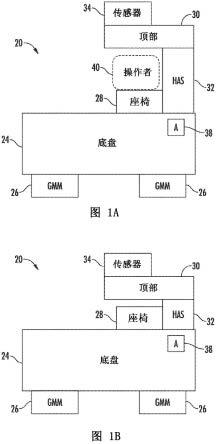
2.图1a和图1b是示意性地示出了示例性车辆的示意图,该车辆具有处于不同高度的可调节的支撑传感器的顶部。
3.图2是示意性地示出了示例性车辆的部分的示图。
4.图3是示意性地示出了图2的车辆的一个示例性实施方案的部分的示图。
5.图4是示意性地示出了图2的车辆的一个示例性实施方案的部分的示图。
6.图5是示意性地示出了图2的车辆的一个示例性实施方案的部分的示图。
7.图6是示意性地示出了图2的车辆的一个示例性实施方案的部分的示图。
8.图7是示意性地示出了用于图2的车辆的示例性非暂态计算机可读介质的框图。
9.图8是示例性可致动顶部的控制方法的流程图。
10.图9是示意性地示出了用于图2的车辆的示例性非暂态计算机可读介质的框图。
11.图10是示例性可致动顶部的控制方法的流程图。
12.图11a是示例性车辆的立体图,该车辆具有处于升高位置的高度可调节的支撑传感器的顶部。
13.图11b是图11a的车辆的侧视图,其中顶部处于升高位置。
14.图11c是图11a的车辆的侧视图,其中顶部处于降低位置。
15.图12是具有高度可调节的支撑传感器的顶部的示例性车辆的前视立体图。
16.图13是图12的车辆的后视立体图。
17.图14是图12的车辆的左侧视图。
18.图15是图14的示例性车辆沿着线15-15截取的仰视立体图。
19.在所有附图中,相同的附图标记指示相似但不一定相同的元件。这些图不一定是按比例的,并且一些零件的尺寸可能被放大以更清楚地示出所示示例。此外,附图提供了与说明书一致的示例和/或实施方案;然而,说明书并不限于附图中提供的示例和/或实施方案。
具体实施方式
20.公开了有助于增强对可致动顶部的高度进行控制的示例性可致动顶部的控制系统、方法和控制指令。示例性系统、方法和控制指令有助于基于来自被顶部承载或支撑的传感器的信号来自动调节可致动顶部的高度。示例性系统、方法和控制指令可以通过传感器、基于传感器在各个高度处感测的性能(该感测性能可以包括由这种传感器获取的数据的质量)通过自动调节支撑这些传感器的顶部的高度而有助于增强性能。这种调节可以基于周围枝叶或周围作物的高度进行。
21.示例性系统、方法和控制指令可以通过响应于即将到来的障碍物、感测到的车辆在拖车上的定位、感测到的车辆的拖拽或感测到的储存设施的开口或内部的高度通过自动降低顶部高度而有助于降低车辆的运输和储存成本。
22.公开了一种示例性车辆,该车辆可以包括底盘、支撑底盘的地面动力构件、座椅、座椅上方的顶部、支撑顶部的高度可调节的支撑件、由顶部支撑的传感器、以及用于选择性地使顶部升高和降低的致动器。
23.公开了一种示例性顶部控制方法,该方法可以包括利用由车辆的顶部支撑的传感器感测车辆的周围事物、以及基于感测到的周围事物来自动调节顶部的高度。
24.公开了一种示例性可致动顶部的控制方法,该方法可以包括:利用由车辆的顶部支撑的在第一高度处的传感器感测车辆的周围事物、评估传感器在第一高度处的性能、以及基于该性能将传感器自动移动至与第一高度不同的第二高度。
25.公开了一种示例性非暂态计算机可读介质,该非暂态计算机可读介质包含用于指导处理器的指令。指令可以包括:感测指令,所述感测指令用于指导处理器获得信号,该信号来自由车辆顶部承载的传感器并且用于指示车辆周围事物的特征;高度确定指令,所述高度确定指令用于指导处理器基于信号来确定顶部的高度;以及顶部致动指令,所述顶部致动指令用于引导处理器自动输出控制信号,从而使致动器将顶部移动至确定的高度。
26.图1a和图1b示意性地示出了示例性车辆20,该车辆具有支撑在两个不同的高度处的顶部。车辆20可以有助于增强由顶部支撑的传感器的性能。车辆20可以通过响应于即将到来的障碍物、感测到的车辆在拖车上的定位、感测到的车辆的拖拽或感测到的储存设施的开口或内部的高度来自动降低顶部的高度,从而有助于低成本的运输和储存。车辆20包括底盘24、地面动力构件26、座椅28、顶部30、高度可调节的支撑件32、传感器34和致动器38。
27.底盘24包括车辆20的基部或框架。底盘24可以包括拖拉机的底盘、收割机的底盘、卡车的底盘或其他车辆的底盘。底盘24可以包括用于为地面动力构件26提供动力的内燃机或电动马达。
28.地面动力构件26包括以可移动的方式将底盘24支撑在下表面上方的构件。在一个实施方案中,地面动力构件26包括轮。在另一实施方案中,地面动力构件26包括轨道。
29.座椅28由底盘24支撑并且用于在底盘24上支撑操作者。座椅28可以与车辆20的操作者控制件相邻地延伸。
30.顶部30在座椅28上方或上面延伸。顶部30保护依靠在座椅28上的操作者40免受阳光、雨水等的影响。顶部30可以另外覆盖和保护车辆20的操作控制件。顶部30被高度可调节的支撑件32以可移动的方式支撑。
31.高度可调节的支撑件32在图1a中所示的升高位置与图1b中所示的降低位置之间以可移动的方式支撑顶部30。在一个实施方案中,高度可调节的支撑件32将顶部30支撑在多个不同的预定高度中的选定的一个预定高度处。在另一实施方案中,高度可调节的支撑件32将顶部30支撑在座椅28上方的连续的不同高度中的任何高度处。高度可调节的支撑件32可以具有各种形式,比如伸缩管、枢轴、多个联接枢轴或四杆联接件。
32.传感器34包括至少一个传感器,至少一个传感器由顶部30支撑,从而可以随着顶部30的移动而移动。传感器34可以感测顶部30的位置。传感器34可以附加地或替代性地感
测车辆20的周围事物。例如,传感器34可以输出指示相对于车辆20的周围事物的高度的信号。在一些实施方案中,传感器34可以感测车辆20附近的枝叶或作物的高度。传感器34的示例包括但不限于:目镜相机、立体相机、飞行时间相机、热感相机、激光雷达、雷达、声纳、初始测量单元、磁力计、天气传感器(温度、湿度、压力等)和电磁传感器(阳光、无线电等)。在一些实施方案中,传感器34可以包括高度传感器,该高度传感器可以呈致动器编码器、机械行程传感器、惯性测量装置或顶部感知传感器的形式。
33.致动器38包括用于选择性地使顶部30升高和降低的装置,从而也选择性地使传感器34升高和降低。在一些实施方案中,致动器38可以与高度调节支撑件32相互作用。致动器38的示例包括但不限于,电动马达(旋转或线性)、液压马达(气缸马达)和气动致动器(气缸马达)。
34.如图1a和图1b所示,顶部30和传感器34能够在图1a中所示的升高位置与图1b中所示的降低位置之间移动。可以响应于下述将顶部30和传感器34降低至降低位置:车辆被装载到用于运输的拖车上、车辆接近的储存设施的开口或内部的高度、上方树木或其他结构的高度和/或周围完整边缘或作物的高度。可以响应于感测到的操作者40从座椅28和底盘24离开来降低顶部30。
35.可以响应于操作者登上车辆20或即将登上车辆20来升高顶部30和传感器34。可以响应于周围完整边缘或作物的高度升高该顶部30和传感器34,其中,较高的传感器34的高度可以有助于使传感器34对子目录(subfolder)作物的感测增强。这种升高和降低可以由操作者手动触发,或者可以由控制器基于从传感器34或其他传感器接收的信号自动触发。
36.图2是示出了示例性车辆120的部分的示意图。车辆120类似于上述车辆20,除了车辆120另外包括传感器135和控制器150。车辆120与车辆20的部件对应的那些保持不变的部件以类似的方式编号。
37.图3至图6示意性地示出了如上所述的高度可调节的支撑件32的各种示例。图3示出了包括呈伸缩杆或管42、43形式的高度可调节的支撑件32-1的实施方案。在这种实施方案中,管43从较大的外部管42延伸出和缩回到该较大的外部管中,以使顶部30升高和降低。在一个实施方案中,管42、43可以呈液压或气动活塞-气缸布置的形式,或者致动器38包括阀和加压气体或流体源,以使管43(呈活塞形式)延伸和缩回。
38.图4示出了包括高度可调节的支撑件32-2的实施方案,该高度可调节的支撑件呈具有一对枢轴点45的单个联接件44的形式。在这种实施方案中,致动器38可以包括用于枢转联接件44的旋转致动器或用于枢转联接件44的线性致动器,从而使顶部30升高或降低。
39.图5示出了包括高度可调节的支撑件32-3的实施方案,该支撑件呈形成四杆联接件的一对平行联接件46、47的形式。四杆联接件有助于在顶部30保持水平或保持沿单一取向的同时使顶部30升高和降低。致动器38可以包括用于使顶部30升高和降低的旋转致动器或线性致动器。
40.图6示出了包括高度可调节的支撑件32-4的实施方案,该支撑件为多个连续联接的且以可枢转的方式连接的联接件48、49的形式。致动器38可以包括旋转致动器或线性致动器,以用于使联接件48和/或49枢转来使顶部30升高和降低。
41.传感器135包括对顶部30(和传感器34)的当前高度或延伸范围进行检测的传感器。在一些实施方案中,传感器135可以包括致动器编码器、机械行程传感器、惯性测量装
置、或顶部感知传感器。在一些实施方案中,传感器135可以被省去,其中,控制器150可以基于传输至致动器38的先前控制信号来确定顶部30的当前高度。在一些实施方案中,可以使传感器135知道来自传感器34的信号,这些信号自身可以指示顶部30的高度。
42.控制器150对顶部30和传感器34的升高和降低进行控制。控制器150包括处理器152和非暂态计算机可读介质154。处理器152执行由介质154提供的指令。介质154可以呈具有逻辑部件的电路板的形式、具有编码指令的软件的形式、或它们的组合。
43.图7是示意性地示出了介质154的一个示例的框图。如图7所示,介质154包括周围事物感测指令160、高度确定指令162和顶部致动指令164。周围事物感测指令160指导处理器152输出控制信号,从而使传感器135和/或传感器34对车辆120的周围事物进行感测。这种周围事物可以包括感测高层或高架结构170、作物或枝叶172、拖车174和/或车辆120前方的不同牵引车辆。高架结构170可以包括用于高架结构的开口或间隙,比如高架道路下方的开口或入口开口。
44.高度确定指令162指导处理器152确定:(a)顶部30的当前高度和/或(b)根据框160感测到的周围事物的高度。高度确定指令162可以指导处理器152相对于识别到的地面或其他参考位置来对由传感器34捕获的图像或来自传感器34的其他信号进行分析,以确定高架结构170的高度和/或作物/枝叶172的高度。例如,指令162可以使处理器152使用由传感器34捕获的图像来确定特定高架结构170相对于车辆120的已知参考表面或结构的距离,以确定高架结构170的高度和/或作物/枝叶172的高度。传感器134可以以特定角度被支撑在特定高度处,其中,边缘检测分析可以应用于由传感器34捕获的图像,以确定或估计高架结构170和/或作物、枝叶172的高度。
45.顶部致动指令164指导处理器152基于来自传感器34的信号和/或根据指令162做出的高度确定来输出控制信号,从而使致动器38升高和降低顶部30。在一个实施方案中,顶部致动指令164可以指导处理器152根据从传感器34或其他传感器接收到的信号来识别或确定车辆120当前是停在拖车174上还是被前方车辆拖曳。例如,拖车174或前方拖拽车辆可以包括rfid(射频)标签或指示该拖车或前方拖曳车辆存在的一些其他识别标记。在一些实施方案中,处理器152可以对由传感器34捕获的图像进行分析,从而对拖车174和/或拖拽车辆的存在进行辨识。响应于如由处理器152所确定的车辆120可能停在拖车174上或当前被另一车辆拖曳的确定,顶部致动指令164可以使处理器152向致动器38自动输出控制信号,从而使致动器38将顶部30降低到如图1b中所示的降低状态或缩回状态。在车辆120的运输期间,降低状态可以减少风阻并且节省燃料。
46.在一些实施方案中,车辆120可以另外包括座椅占据传感器165,该座椅占据传感器对座椅28上的操作者的存在进行感测。在这种实施方案中,顶部30的降低可以响应于来自传感器165的对座椅28上的操作者40的存在进行指示的信号而通过控制器50自动暂停或终止。
47.在一个实施方案中,顶部致动指令164可以使处理器152输出控制信号,从而使致动器38基于如由控制器150根据高度确定指令162所确定的车辆120的周围事物的确定高度来使顶部30升高或降低。在一个实施方案中,指令162可以指导处理器152输出控制信号,从而使致动器38将顶部30和传感器34自动降低确定的程度,以越过感测到的高架结构170。在一个实施方案中,顶部30可以响应于即将到来的高架结构(当车辆120s向前移动时在车辆
120前方,或当车辆120正在倒车时在车辆120后方)可能会撞击顶部30或传感器34的确定而被降低至最低位置。在一个实施方案中,顶部30可以降低至在最低位置之上的高度,但要足够低以越过即将到来的高架结构。该高度可以基于高架结构的确定高度而被确定。通过不将顶部30和传感器34降低至最低位置,而只是降低至足以越过(在下方延伸)高架障碍物或结构170的位置,可以减少在随后使顶部30和传感器34升高期间所消耗的时间。
48.在一些实施方案中,顶部致动指令164可以使处理器152输出控制信号,从而使致动器38基于确定的作物/枝叶172的高度来使顶部30升高或降低。例如,作物/枝叶172的感测可以在传感器34相对于被感测的作物/枝叶172的特定高度而言的特定相对高度处被最佳地执行。使顶部30和传感器34升高可以导致更大面积的作物/枝叶172被感测,或者由于向传感器34提供的不同视角而可以导致增强的感测。降低顶部30和传感器34可以通过使传感器34定位成更靠近作物/枝叶172的顶端来导致增强的感测。
49.图8是可以由车辆120或其他类似车辆执行的示例性可致动顶部的控制方法200的框图。如框204所示,使用被车辆的顶部支撑的传感器感测车辆的周围事物。如框208所示,基于感测到的周围事物来自动调节顶部的高度。上面关于控制器150描述了用于使顶部自动升高或降低的标准的示例。
50.图9是示意性地示出了介质354的框图,该介质是上述介质154的另一示例性实施方案。介质354包括用于指导车辆122的处理器152执行动作的非暂态计算机可读介质。介质354类似于介质154,除了介质354可以在附加模式下操作,在该附加模式中,利用闭环反馈通过调节顶部30和传感器34的高度来优化或增强信号质量。介质354另外包括信号质量评估指令363,并且包括代替顶部致动指令164的顶部致动指令364。上面关于介质154描述的那些也存在于介质354中的指令以类似的方式编号。
51.信号质量评估指令363指导处理器152对传感器34的性能进行评估。这种性能可以是从传感器34接收的信号的分辨率、使用来自传感器34的信号做出的确定的可靠性、由传感器34输出的图像质量、用于被传感器34捕获的数据的阐明水平等。这种性能可以包括由这种传感器获取的数据的质量。
52.顶部致动指令364类似于顶部致动结构164,除了顶部致动指令364包括附加组的指令,所述附加组的指令用于当控制器15d以不同的操作者选择模式运行时,其中,传感器34和顶部30的高度自动调节以通过传感器34来优化性能。顶部致动指令364使处理器152输出对顶部30和传感器34的高度进行调节的控制信号。在每个高度处,传感器34的性能由指令363评估。使用闭环反馈,迭代地调节顶部30的高度,直到传感器34的性能在规定的性能水平内,或者在一些实施方案中传感器的性能被优化。根据被感测的作物/枝叶的类型、照明条件、空气传播的污染物/灰尘状况、被检测的作物/枝叶172的高度等,传感器34可以在不同的高度处表现良好。介质354指导处理器152在给定的这种条件下自动识别传感器34的最佳高度,并且自动输出控制信号,从而使致动器38将顶部30和传感器34定位在特定的确定高度处。
53.图10是示例性致动器的流程图,其中顶部控制方法400可以由包括如上所述的介质354的车辆120执行。如框404所示,使用在第一高度处的被车辆的顶部支撑的传感器感测车辆的周围事物。如框408所示,评估在第一高度处的传感器的性能。如框412所示,基于检测到的性能,被顶部支撑的传感器自动移动至与第一高度不同的第二高度。
54.图11a至图11c示出了示例性车辆520的部分,示例性车辆的部分被示意性地表示。车辆520呈拖拉机的形式。车辆520包括底盘524、地面动力构件526、操作者座椅528、操作者控制件529、顶部530、高度可调节的支撑件532、传感器534-1、534-2(示意性地示出)(统称为传感器534)、致动器38和控制器150。
55.底盘524包括车辆520的框架和动力源。动力源可以包括内燃机、电动马达或其组合。在所示的示例中,底盘524还包括用于承载各种物品的位于前方的车厢525。地面动力构件526被图示为呈轮胎的形式。在其他实施方案中,地面动力构件526可以包括轨道。
56.操作者座椅528定位在顶部530下方且在操作者控制件529的后方。操作者控制件529可以包括对位于顶部530下方的转向盘进行支撑的控制台。在一些实施方案中,操作者控制件529还可以包括操纵杆、显示器屏幕、触摸屏或其他通知或输入装置。
57.顶部530对座椅528和操作者控制件529进行覆盖和保护。顶部530被高度可调节的支撑件532以可移动的方式支撑。在所示的示例性中,高度可调节的支撑件532包括四个伸缩杆或管,所述伸缩杆或管能够通过致动器38(如上所述)在不同的延伸状态之间移动。在一个实施方案中,致动器38可以包括液压或气压缸-活塞组件。在其他实施方案中,高度可调节的支撑件532和致动器38可以具有如上面关于车辆20或车辆120所描述的其他形式。
58.传感器534被顶部530支撑。在一个实施方案中,传感器534集成到顶部530中。在另一实施方案中,传感器534在顶部530上方或下方安装至顶部530。
59.传感器534可以类似于上述传感器34。在一些实施方案中,传感器534可以包括无源和有源传感器的混合。传感器534可以包括感知传感器和本体感受传感器的混合。传感器534可以包括但不限于双目相机、立体相机、飞行时间相机、热感相机、激光雷达、雷达、声纳、惯性测量单元、磁力计、天气传感器(温度、湿度、压力等)、电磁传感器(阳光、无线电等)或者用于各种农业、建筑或其他操作的其他任务特定传感器。
60.在所示的示例性中,传感器534-1具有车辆520前方的视野,而传感器534-2具有车辆520后方的视野。传感器534向控制器150提供信号,该信号提供与车辆520的周围事物有关的信息,比如高架结构170的存在和高度、作物/枝叶172的特征、和/或枝叶/作物172的高度。可以被传感器534检测到的作物/枝叶172的特征可以包括但不限于作物的种群、作物的健康、作物的密度、作物内杂草的存在等。
61.在上面关于车辆120描述了控制器150。在一个实施方案中,控制器150包括介质154。在另一实施方案中,控制器150包括介质354。控制器150可以向致动器38输出控制信号,从而使致动器38将顶部530和传感器534移动至图11b中所示的降低状态以及将顶部530和传感器534移动至图11c中所示的降低状态。如上所述,响应于由传感器534或其他传感器检测到的车辆520被装载在拖车上或被另一车辆拖曳,可以通过控制器150来自动升高和降低顶部530和传感器534。可以通过控制器150自动升高和降低顶部530和传感器534,以越过即将到来的高架结构。基于作物/枝叶的高度或特征,可以通过控制器150来自动升高和降低顶部530和传感器534。可以基于传感器534的确定性能来自动升高和降低顶部530和传感器534,使得传感器534被支撑在传感器534具有改进或增强性能的高度处。例如,顶部530和传感器534可以被升高或降低至向传感器534供给优越视野或有利于感测较高作物的高度。在一些实施方案中,可以周期性地执行对顶部530的调节,以增强传感器534的性能。例如,根据数据收集目标,每个田地一次、每行一次或实时连续地执行顶部530的调节,以增强传
感器性能。
62.图12和图13是示出了拖拉机形式的示例性车辆620的示图。车辆620类似于上述车辆520,除了车辆620另外提供了用于对顶部630以及该顶部承载的传感器和指示器/显示器进行定位的姿势控制。车辆620还包括车辆状态和反馈系统622。图12和图13示出了被顶部630支撑的传感器的具体示例。车辆620包括底盘700、地面推进构件702、电池704和车辆驾驶室706。车辆620还包括灯800、转向单元802、推进单元804、动力关闭(pto)单元806、液压动力单元808、制动器810和辅助单元812。
63.底盘700包括对车辆620的其余部件进行支撑的框架。在所示的示例中,底盘700包括用于储存和运输货物的前部货物车厢708。在所示的示例中,底盘700还被配置成用于连接至附件/工具625。在所示的示例中,推进单元804包括通过由电池供给的电力驱动的电动马达。
64.地面推进构件702包括与下层地形接合并且由推进单元804驱动的构件。在所示的示例中,地面推进构件702包括后部轮710和前部轮712。在所示的示例中,后部轮710由推进单元804驱动,而前部轮712由转向单元802操纵或转动。在其他实施方案中,地面推进构件702可以包括轨道或其他地面接合构件。
65.电池704包括电池单元,该电池单元以可移除的方式接纳在从底盘700的前部向后延伸的对应室或腔内。电池704与对应的连接接口匹配,以用于将电能从电池704传输至车辆620的电动部件。在其他实施方案中,电池704可以位于其他位置。在其他实施方案中,电池704可以是固定的并且不可更换或不可移除的。在所示的示例中,电池704向驱动后部轮710的推进单元804提供电力。在所示的示例中,电池704向液压动力单元808的液压马达或泵、转向单元802和制动器810提供电力。电池704另外向灯800、附件/工具625和辅助单元812提供动力。
66.驾驶室706包括当操作者操作车辆620时可以就坐的隔室。驾驶室706包括座椅713、转向盘716、控制台718和顶部630。顶部630在座椅713和控制台718上方延伸。顶部630被高度可调节的支撑件532以可移动的方式支撑(如上所述)。在所示的示例中,高度可调节的支撑件532包括四个伸缩杆或管,所述伸缩杆或管能够通过致动器38在不同的延伸状态之间移动(如上所述)。在一个实施方案中,致动器38可以包括液压或气压缸-活塞组件。在其他实施方案中,高度可调节的支撑件532和致动器38可以具有如上关于车辆20或车辆120所描述的其他形式。
67.灯800包括被车辆620支撑的灯,以用于提供关于车辆620的照明或用于向车辆620提供警报或通知。转向单元802包括电气和/或液压部件以及相关联的控制器,电气和/或液压部件以及相关联的控制器实现了轮、轨道等的转动,以引导车辆的向前或向后行进。推进单元804包括内燃机、电动马达、传动装置和用于对车辆620的向前和向后推进进行控制的相关联的控制器。pto单元806包括电动、液压或机械驱动件、和用于使动力输出装置(比如突出的花键)旋转的相关联控制器,以用于向与附件或工具相关联的配件供给扭矩。液压动力单元808包括液压泵、阀和相关联的控制器,以用于将加压液压流体供给至车辆620的部分或供给至由来自车辆620的这种加压液压流体提供动力的附件/工具。制动器810包括用于制动、减慢车辆620的推进的装置。辅助单元312包括车辆620的可移动或致动器部件,比如在车辆620不是拖拉机而是诸如收割机之类的另一车辆的情况下。例如,辅助单元312可
以包括收割机的排放喷口,其中排放喷口的定位和/或排放喷口的螺旋钻的旋转是可调节的。
68.附件/工具625包括由车辆620承载的附件和/或由车辆620推动或拉动的工具。附件可以呈铲斗、叶片、收割机头等的形式。工具的示例可以包括各种工具中的任意工具,比如货车、手推车、犁、盘、切碎机、打捆机、喷雾器等。如上所讨论的,车辆动作可能涉及重新定位这种附件或工具或者调节对这种附件或工具的电力供给。
69.与车辆520一样,车辆620包括由高度可调节的顶部支撑和承载的传感器。在所示的示例中,这种传感器包括相机634-1(图12中所示)、相机634-2(图13中所示)和相机634-3(图15中所示)(统称为相机634)。相机634捕获操作者控制姿势以及周围事物的图像并且将信号输出至处理器652。相机634-1在顶部630的前边缘上延伸以捕获车辆620前方的区域。相机634-2在顶部630的后边缘上延伸以捕获车辆620后方区域的图像。相机634-3在顶部630的底侧延伸以捕获车辆620的侧部区域。
70.相机634捕获图像,所述图像通过处理器652使用光学辨识技术诸如分割等来进行分析,以区分物体、物体相对于车辆620的定位以及物体的操作状态。如上面关于传感器534所讨论的,向处理器652提供信号,所述信号提供与车辆620周围事物有关的信息,比如高架结构170的存在和高度、作物/枝叶172的特征、和/或枝叶/作物172的高度。可以由传感器534检测到的作物/枝叶172的特征可以包括但不限于作物的种群、作物的健康、作物的密度、作物内杂草的存在等。如将在下文中描述的,相机634还可以捕获图像并且输出信号,从而识别操作者的定位以及来自操作者和由操作者进行的输入姿势。在一些实施方案中,相机634可以包括感知传感器和本体感受传感器的混合。相机634可以包括但不限于双目相机、立体相机、飞行时间相机和热感相机。在一些实施方案中,车辆620可以包括位于相同或不同位置处的附加相机或更少的相机以及替代形式的传感器。例如,在一些实施方案中,车辆620可以包括被顶部630支撑的附加或其他类型的传感器,比如激光雷达、雷达、声纳、惯性测量单元、磁力计、天气传感器(温度、湿度、压力等)、电磁传感器(阳光、无线电等)或用于各种农业、建筑或其他操作的其他任务的特定传感器。
71.来自相机634的信号可以另外用于感测顶部630的高度。在一些实施方案中,顶部630的高度可以通过处理器652使用来自对高度可调节的支撑件532的状态进行感测的其他传感器的信号来确定。在一些实施方案中,顶部630的高度可以通过处理器652基于致动器38的状态来确定。例如,液压或气压缸-活塞组件的延伸程度也可以指示顶部630的高度。在一些实施方案中,顶部630的高度可以根据致动器编码器、机械行程传感器、和惯性测量装置和顶部感知传感器来进行感测或确定。
72.处理器652利用由相机634(以及由顶部630支撑的任何其他传感器)提供的数据或信息来自动地控制车辆620和/或附件/工具625的操作。在一些实施方案中,处理器652利用来自相机634的信息(以及由顶部630支撑的任何其他传感器)来以自主的方式操作车辆620和/或附件/工具625,而无需人工干预或实时输入。在一些实施方案中,车辆620有助于通过没有驻留于驾驶室706中或不乘坐车辆620的操作者来进行远程操作者控制、控制车辆620和/或附件/工具625。例如,车辆620和/或附件/工具625可以通过在车辆620旁边、后方或前方行走的操作者来远程控制。在一些实施方案中,可以使用从由远程操作者携带的便携式电子装置传输的无线信号来向车辆620和/或附件/工具625提供控制输入,该便携式电子装
置比如为智能手机、笔记本电脑、平板电脑或能够传输无线信号的其他装置。
73.在所示的示例中,车辆620被配置成有助于远程操作者控制、有助于来自在车辆620旁边、后方或前方行走的操作者的控制。在所示的示例中,车辆620另外包括车辆状态和反馈系统722。车辆状态和反馈系统722包括指示器670-1、670-2、670-3、670-4(统称为指示器670)、指示器672、指示器674和状态/反馈指令676。指示器670包括位于顶部630的四个角部处的显示器屏幕。指示器670-1和指示器670-2沿向前方向面向,并且朝向车辆620的与这两个指示器相应的相反两侧倾斜。指示器670-3和指示器670-4沿向后方向面向,并且朝向车辆620的与这两个指示器相应的相反两侧倾斜。指示器670呈现了可以由操作者642在车辆620周围的各个位置处查看的图形和文本。
74.指示器572包括长形杆或条,该长形杆或条围绕车辆620的罩601的前部和罩601的侧部,其中,杆或条可以在处理器652的控制下被选择性地照明。在一些实施方案中,指示器572在照明状态与非照明状态之间被致动,以向可能远离车辆620而没有在驾驶室706内的操作者642提供反馈。在一些实施方案中,指示器572可以在不同颜色或颜色深浅之间致动,以向操作者642提供状态信息。在一些实施方案中,指示器572可以在不同亮度水平之间致动或者能够被致动成闪烁或以不同频率闪烁,以向远程操作者642提供状态信息。
75.指示器674包括扬声器/麦克风。在所示的示例中,指示器674位于顶部630的底侧、靠近转向控制台718。指示器674向远离车辆620的操作者提供听觉状态信息。在指示器674还用作麦克风的一些实施方案中,指示器674可以用作用于远程操作者的输入装置,由此操作者可以提供听得见的指令或命令,并且其中,处理器652使用语音辨识来识别这种命令并且执行这种命令。
76.在一些实施方案中,灯726可以用作附加的指示器,其中,这种灯726的颜色、亮度、闪动频率等可以被控制,以向操作者642提供状态信息。在一些实施方案中,附加的可见指示器诸如发光二极管灯、灯条等可以用于基于车辆620、该车辆的工具625、该车辆的部件800、802、804、806、808、810、812的当前状态来提供状态信息,和/或如基于由相机634捕获的图像提供操作者642的定位或工具625的定位。
77.状态/反馈指令676包括在非暂态计算机可读介质654中设置的电路板上的软件、代码或逻辑元件。指令568指导处理器652输出对指示器670、572和674的致动或状态进行控制的各种控制信号。例如,根据指令568,处理器652可以通过向指示器672提供第一亮度、颜色、开/关状态和/或闪动频率来指示车辆620的第一状态,并且可以通过向指示器672提供不同的第二亮度、颜色、开/关状态和/或闪动频率来指示车辆620的不同的第二状态。例如,指示器672可以在向前行进时被照明成具有绿色,并且在停止时被照明成具有红色。作为另一示例,指示器572可以在动力输出装置正在运行或在工具被供电时被照明成具有绿色,并且可以在动力输出装置不再运行或在工具不再被供电或驱动时具有红色。
78.根据指令568,处理器652可以通过在指示器670中的一个或多个指示器上显示图形或文本来指示车辆620的第一状态或车辆620的第二状态。由指示器670、572和674提供的这种状态信息可以包括车辆行进的速度或速率、工具的速度或状态和/或灯800、转向单元802、推进单元804、pto单元806、制动器810和/或辅助单元812中的任一者的状态。由指示器670、572和574提供的这种反馈或状态信息可以包括:接收或捕获来自操作者(操作者身体644和/或输入装置648)的姿势的确认、辨识这种姿势的确认、这种命令将要被执行的指示、
对于操作者重复这种姿势或移动以在提供这种姿势时更中央地位于相机634的视野内的需求、或者考虑到车辆620的当前状态或操作者相对于车辆620和/或该车辆的工具的位置而不会执行与这种姿势相关联的命令的指示。不同的指示器可以被用于向操作者提供不同类型的状态信息。
79.在一个实施方案中,根据包含在介质654中的指令,处理器652利用来自相机634-1的图像来识别植物行的定位并且向转向单元802和推进单元804输出控制信号,以在植物(比如作物植物、树木等)的行之间且沿着植物的行自动地驱动车辆620(以及任何附件/工具625)。在一个实施方案中,根据包含在介质654中的指令,处理器652利用来自相机634-1的图像来识别操作者642的定位或位置以及操作者642的移动。根据包含在介质654中的指令,处理器652还可以基于操作者642的位置或移动来阻止或允许来自操作者642的其他命令(基于输入姿势)。在一些实施方案中,根据包含在介质654中的指令,处理器652可以输出控制信号,从而使推进单元804和转向单元802来移动车辆620,以便以预先选择的或操作者选择的距离跟随操作者642的移动。在一些实施方案中,处理器652可以将推进单元804和制动器810控制成基本上匹配操作者移动的速度。在一些实施方案中,根据包含在介质654中的指令,处理器652可以利用由任何相机634捕获的图像来识别动物或其他障碍物,其中,处理器652向转向单元802和推进单元804输出控制信号,以控制车辆620的移动,从而避免这种动物或障碍物。在一些实施方案中,处理器652可以利用来自任何相机634的信号,以控制由灯624、626提供的照明。在一些实施方案中,处理器652可以利用来自任何相机634的信号和来自所提供的全球定位系统的附加信号来在没有操作者干预的情况下,自动地驾驶车辆620往返于工地或田地,往返于车辆620的储存区、棚屋、车库等(家庭位置),或者往返于充电地点或对电池充电的位置704。
80.在一些实施方案中,处理器652可以利用识别到的操作者642或动物或其他障碍物的定位,从而对制动器810、pto单元806、辅助单元812或附件/工具625进行控制。例如,在一种情况下,附件/工具625可以包括对除草剂、杀虫剂、杀真菌剂等进行喷洒的喷雾器。响应于检测到操作者或动物的存在,处理器652可以暂时停止车辆620的移动和/或喷洒操作,直到操作者或动物与车辆620或该车辆的工具625相距预定距离。在一些实施方案中,处理器652可以响应于来自照相机634的对操作者、其他人或动物在距动力输出装置623的预定距离内进行指示的图像来自动停止动力输出装置623的操作。在一些实施方案中,根据包含在介质654中的指令,处理器652可以利用由任何相机634(加上车辆620上划分的任何其他传感器)捕获的图像来控制附件/工具625的致动。例如,处理器652可以识别饲料槽的各个位置,并且可以控制螺旋钻或者拉动或附接工具625的其他装置的致动,以在特定时间和位置将饲料卸载到饲料槽中。结果,处理器652有助于任务的自动化。
81.在一些实施方案中,指示器670或672可以在操作者的当前识别到的位置将阻止他或她查看或确定这种信息的情况下向操作者642提供信息。例如,定位在车辆620的前部处的操作者可能会基于指示器670-1或670-2的与车辆620后部处的工具625的状态有关的信息而进行启动。定位在车辆620后部处或车辆620的一侧处的操作者可以在选定的指示器670上提供与车辆620前部处或车辆620另一侧处的工具、其他操作者或环境的状态有关的状态信息。因此,考虑到操作者相对于车辆620的当前位置,车辆620向远离车辆620的操作者提供可能无法查看的信息。
82.在所示的示例中,车辆620有助于基于来自远程操作者642(站在车辆620旁边、后方或前方)的输入姿势来控制车辆620和/或附件/工具625。相机634捕获这种姿势的图像或视频并且将这种姿势解释为特定输入命令和/或对待由指示器670提供的信息的请求。特定姿势与特定输入/命令的关联可以根据耦接至车辆620的特定附件工具和/或耦接至车辆620的特定附件或工具的当前状态而变化。根据耦接至车辆620的特定附件或工具和/或耦接至车辆620的特定附件或工具的当前状态,相同的直接或间接姿势可以与不同的命令相关联。例如,在一些实施方案中,来自相机634的图像可以被处理器652使用已识别耦接至车辆620的特定附件或工具625,其中,处理器652将根据耦接至车辆620的识别到的附件或工具625来以不同的方式解释相同的输入姿势。
83.操作者642提供的直接姿势可以由操作者的身体644提供,比如操作者的手、手指、腿、躯干等的移动或定位。操作者的身体644的移动、定位/取向可以用作输入646,该输入通过相机634中的至少一个相机被感测。由操作者642发起的间接姿势可以涉及输入装置648的用作输入646的移动和/或定位。输入装置648可以包括旗状件、棍状件、智能电话、或者可以由操作者642手动操纵并且可以由相机634辨识的其他手持或便携式物理结构。
84.在所示的示例中,输入装置648包括由操作者642手动操纵、移动或定位的手持装置。输入装置648包括具有输入标识符832的第一面830。输入标识符832可以根据输入辨识指令58而被相机634和处理器652辨识。在一些实施方案中,输入标识符832可以包括闪烁灯、颜色的特定图案或深浅、或者可以容易被相机634感知的其他特征,以有助于对输入装置648的定位和/或移动进行感测。
85.输入装置648还包括具有显示器836的相反的第二面834。在一个实施方案中,来自相机634的信号可以被传输至输入装置648,其中,基于这种信号,对车辆620周围区域的描绘被呈现在显示器836上。所捕获的图像可以被传输至输入装置648并且被呈现在显示器836上。结果,向车辆620提供远程命令的操作者642可以不仅基于他或她的远离车辆620的视角而且还基于相机634的视角或从车辆620的视角所得到的视角来做出这种姿势并且提供这种命令。因此,操作者可以关于这种远程命令做出更明智的决定。在一个实施方案中,输入装置648可以包括与由处理器652和介质654所提供的控制器无线通信的智能电话,其中,智能电话的定位或移动用作用于向车辆620提供远程命令的远程姿势。
86.为了执行这样的姿势辨识,另外包括以下各者或处于以下各者中:无线通信输入动作存储814、授权存储816、操作者识别和授权指令818、输入装置识别和授权指令820、远程操作者输入感测指令822、输入辨识指令824、操作者位置识别指令826、和输入响应控制指令828。
87.输入动作存储814包括一个或更多个数据库或查找表,数据库或查找表将各种感测到的姿势(直接或间接)链接至用于车辆动作的相关联的请求或命令。
88.授权存储816包括一个或多个数据库或查找表,数据库或查找表对预授权操作者和/或预授权输入装置648进行标识,以用于提供用于输入对车辆动作的请求或命令的姿势。例如,授权存储816可以包括被授权的操作者642的照片,其中,操作者的授权可以通过比较所捕获的候选操作者642的图像和包含在存储816中的照片来确定。授权存储816可以包括预先分配的密码组,其中,对操作者642或输入装置648的授权可以通过将接收到的通过指示器674输入的密码与授权存储816进行比较来确定。授权存储816可以包括用于授权
输入装置248的条形码值或其他标志。输入动作存储814和授权存储816可以包含在车辆620所承载的介质654上,或者可以储存在远程存储器或服务器中,其中,车辆620通过与远程存储器或服务器的无线通信连接来访问存储814、816。
89.操作者识别和授权指令818包括下述指令:该指令用于指导处理器652识别和授权候选操作者642,该候选操作者用于提供直接姿势,以提供用于车辆620的远程控制命令。指令818可以指导相机634中的至少一个相机或替代的传感器,以捕获操作者642的图像,并且然后将接收到的信息或数据与在授权存储816中找到的信息进行比较。基于这种比较,操作者642可以被授权成提供直接姿势以用于远程控制车辆620。
90.输入装置识别和授权指令820包括用于指导处理器652识别和授权候选输入装置648的指令,该候选输入装置提供直接姿势以用于提供用于车辆620的远程控制命令。指令820可以指导相机634或替代传感器捕获输入装置648的条形码或其他标记的图像,或从输入装置648接收识别/授权信号,然后将接收到的信息或数据与在授权存储816中找到的信息进行比较。基于这种比较,输入装置648可以被授权成提供间接姿势以用于远程控制车辆620。
91.操作者位置识别指令826包括指导处理器652识别远程操作者642相对于车辆620的定位的指令。基于经确定的相对定位,这种指令还可以指导处理器652向操作者642输出通知,该通知对应于感测到的操作者输入/姿势来建议操作者相对于车辆移动或自动中断所需求的车辆动作。以这种方式,指令826可以防止当操作者可能相对于车辆620太靠近或不在所需求的车辆动作的位置时执行车辆动作。
92.输入响应控制指令828包括指令,该指令被配置成向车辆620的各种致动器等输出控制信号,以使车辆620执行与指令828所确定的感测到的输入相对应的特定车辆动作。各种车辆动作的示例可以与来自操作者642的特定姿势(直接或间接)相关联,其中,可以响应于特定姿势执行包括但不限于下述的车辆动作:前进速度、后退速度、左/右方向、制动、灯(夜灯、行车灯、聚光灯)、信号、声音(喇叭、扬声器)、警告(闪光灯、应急灯)、实施特定动作(左喷雾器开/关、右喷雾器开/关、左工具翼状部升高和降低、右工具翼状部升高或降低、动力吸收、移动排放喷口、改变排放喷口的螺旋钻的操作速度、打开/关闭动力输出装置、调节动输出装置的速度、升高/降低车辆的附件(比如铲斗、叉状件等)、调节用于工具的液压流体或液压动力或附件的供给、升高/降低三点钩状件等。
93.在所示的示例中,车辆620有助于远程操作者与顶部630的高度以及相机634、灯726和指示器670的高度有关的控制。远程操作者可以以由相机634捕获的姿势的形式提供输入646,其中,该姿势由处理器652识别,其中,输入646使致动器38将顶部630升高或降低。因此,远程操作者642可以基于不同的作物和环境条件来使顶部630升高或降低,以重新定位使图像捕获增强的相机6344。顶部630可以由远程操作者642升高或降低,以改变完全照明车辆620周围的区域的灯7262的定位。顶部630可以由远程操作者642升高或降低,以改变指示器670的高度,以有助于操作者更好地观察。在一些实施方案中,处理器652可以基于根据由相机634捕获的图像所确定的操作者642与车辆620的相对位置来使顶部630自动升高或降低。
94.如图12中示意性所示,在一些实施方案中,相机634中的每个相机可以具有相关联的致动器817,该致动器可以将焦点重新定向成我们的相关联相机634的目标。在这种实施
方案中,操作者642可以以由处理器652辨识的姿势的形式提供输入646,其中引起了处理器652顶端控制信号使致动器8172重新定向选定的相机634中的一个或多个相机。结果,操作者可以控制单独相机634的视野。在一些实施方案中,关于相机634的视野的控制可以以其他方式调节,比如由驾驶室706内的操作者或使用远程便携式电子装置或其他远程控制的远程操作者。在一些实施方案中,基于相机634所获取的先前数据、基于车辆620的各种部件800、802、804、806、808、810、812的现有操作状态、基于附件/工具625的现有操作状态、和/或基于新接收到的输入646或将要执行的与车辆620的各种部件800、802、804、806、808、810、812中的至少一个部件的操作状态有关的命令,可以由处理器652(根据包含在介质654中的指令)自动调节相机634的取向。
95.在一些实施方案中,指示器670和相机634的状态可以附加地基于相机634所感测的或者顶部630承载的其他传感器所感测的信息来自动调节。例如,来自相机634的图像可以用于确定环境照明水平。在其他实施方案中,其他类型的传感器可以被车辆620的顶部630或其他部分支撑,从而感测环境照明的程度(不同的环境照明,比如在白天的晚些时候、中午、晚上)。基于所确定的环境照明水平,可以自动调节指示器670的亮度。基于所确定的环境照明,可以自动调节相机634的操作特征。
96.总体而言,上述车辆20、120、520和620中的每个车辆可以提供具有较低轮廓的顶部,使得车辆能够在更小且更高效的卡车或车辆内移动。在被承载在拖车上时,较低的顶部高度可以减少空气动力阻力和与高架障碍物碰撞的风险。使用由顶部支撑的传感器可以将车辆储存在低高度的车库、棚屋或谷仓中,同时在储存期间不会影响传感器的功能。当在没有驾驶员的情况下操作时,这种顶部高度调节可以有助于自动调节以优化视野并且避免由枝叶引起的遮挡。高度调节还可以使同一车辆能够看到高大的作物,如玉米,同时在悬置的障碍物、如树枝下方或工作场所中进行机动。
97.示例性车辆可以提供利用翻滚保护系统和顶部安装传感器两者的车辆的成本有效、高效和环境友好的运输和储存。尽管存在高度可能改变的遮挡的枝叶和生长的植物,但示例性车辆有助于在具有最少传感器组的场地中采集传感器数据。示例性车辆可以提供在高架障碍物和高大障碍物两者附近操作的能力,而无需使用单独的专用设备件。
98.示例性车辆提供以下特定优点:
99.1.通过智能调节传感器高度,减少传感器数量和成本。
100.2.增加运输的选择和效率。
101.3.增加在具有较低顶部高度的封闭空间中储存的选择,同时不影响传感器的视野或性能。
102.4.单独硬件配置的更大操作域。
103.5.当处于低的顶部高度配置中时,车辆附近工作的人员被提供明显的视觉指示器或自主操作,从而很可能提高这些人员的安全性和态势感知能力。
104.6.经由基于对所获取的感知数据的处理来自动调节顶部高度,从而提高由传感器、特别是感知传感器收集的数据的价值和相关性。
105.尽管已经参考示例性实施方案描述了本公开,但是本领域技术人员将认识到的是,可以在不背离公开的情况下在形式和细节上做出改变。例如,尽管不同的示例性实施方案可能已经被描述为包括提供各种益处的特征,但是可以设想的是,在所描述的示例性实
施方案或其他替代实施方案中,所描述的特征可以彼此互换或替代性地彼此组合。因为本发明的技术是相对复杂的,所以并非所有的技术变化都是可以预见的。参考示例性实施方案所描述并在所附权利要求中阐述的本公开显然旨在尽可能宽泛。例如,除非另有特别指出,否则列举单个特定元件的权利要求也涵盖多个这样的特定元件。权利要求中的术语“第一”、“第二”、“第三”等仅区分不同的元件,并且除非另有说明,否则不与本公开中元件的特定顺序或特定编号具体关联。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1