具有非平面方向盘轮缘的可缩回方向盘机构的制作方法
背景技术:
1、在机动车辆和卡车行业中,自动驾驶(自主驾驶)和半自动驾驶车辆正在不断发展。这种发展以及电动车辆和自动驾驶车辆的进步进一步促进了线控驾驶转向系统的发展并且增加了对发明构思的需求。
2、在这种情况下,一个特定方面涉及在无需驾驶员进行转向输入的车辆自动驾驶操作期间对方向盘位置的调节。也就是说,期望在自动驾驶操作期间暂时重新定位车辆以产生更多的内部空间来进行其他活动,比如阅读、观看视频和/或用膝上型电脑或平板电脑工作。关于如何调节方向盘,已经提出了若干未来愿景,其中许多依赖于将方向盘折叠起来。
3、然而,已知的用于调节方向盘位置的解决方案通常受制于复杂的结构,并且需要大量的时间来从驾驶构型过渡到自动驾驶构型以及反过来。另外,已知的解决方案可能有因不利操作性而引发安全问题的风险。
4、本发明的目的是提供一种转向系统,该转向系统具有改进的特征并且克服了现有技术的至少一些缺点。
5、特别地,本发明的目的是提供一种具有简单构型的线控转向转向系统。
6、优选地,本发明的目的是提供一种增加驾驶员舒适度的线控转向转向系统。
7、这些目的通过独立权利要求的主题来实现。优选实施例和优选特征在从属权利要求和以下描述中指定。
技术实现思路
1、本发明涉及一种用于车辆、特别是自动驾驶车辆或半自动驾驶车辆的转向系统。优选地,转向系统是线控转向系统。
2、转向系统包括方向盘机构,该方向盘机构具有中心轴线并且能够可逆地沿中心轴线沿朝向车辆的仪表板的方向缩回并且沿中心轴线沿背离车辆的仪表板的方向伸出。在从手动驾驶过渡到自动驾驶时,方向盘机构可以朝向仪表板缩回,并且在从自动驾驶过渡到手动驾驶时,方向盘机构可以朝向驾驶员伸出。
3、转向系统可以被配置成可相对于车辆底盘和/或车辆仪表板移动、优选地至少可平移地移动,使得方向盘机构即方向盘和方向盘机构的另外的部件能够可逆地沿朝向车辆的仪表板的方向缩回并且沿背离车辆的仪表板的方向伸出。在从手动驾驶过渡到自动驾驶时,方向盘机构可以朝向仪表板缩回,并且在从自动驾驶过渡到手动驾驶时,方向盘机构可以朝向驾驶员伸出。
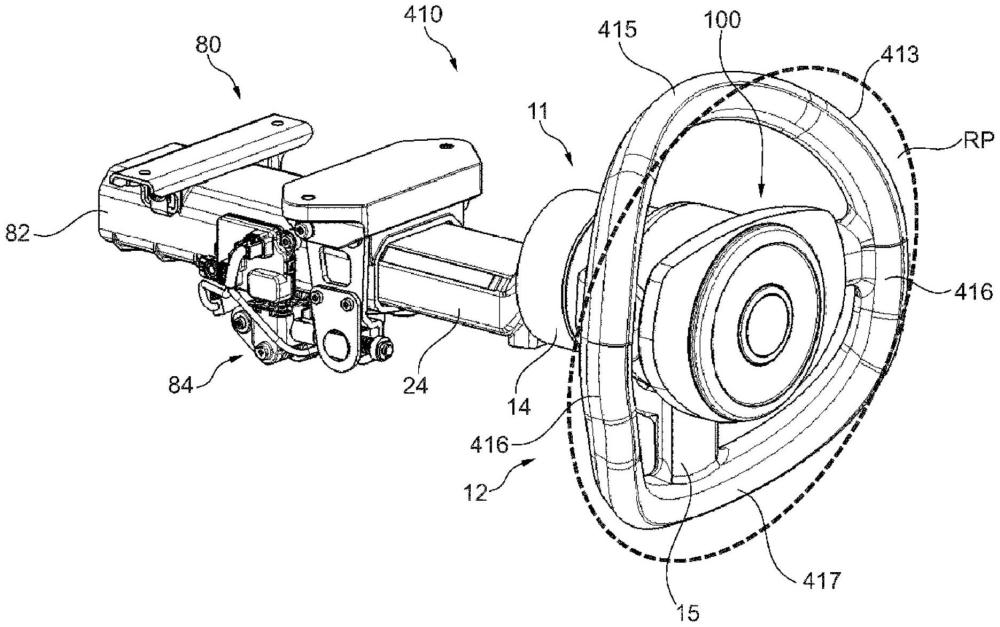
4、方向盘机构包括方向盘,该方向盘具有方向盘轮缘和至少一个轮辐。方向盘轮缘设置有供车辆驾驶员使用的握持部分。
5、方向盘机构包括通过至少一个轮辐而与方向盘固定地连接的方向盘轮毂。固定地连接或附接可以指相连接或附接的部件不可相对于彼此旋转地移动或平移地移动。方向盘轮毂从方向盘朝向车辆的仪表板延伸。方向盘轮毂和方向盘可一起绕方向盘机构的中心轴线旋转。方向盘机构的中心轴线可以是方向盘轮缘和/或方向盘轮毂的中心轴线(公共中心轴线)。
6、方向盘轮缘可以具有非平面构型。非平面构型可以指方向盘轮缘包括的若干区段或部分不位于共用平面中、更确切地不位于垂直于中心轴线的参考平面中。换言之,非平面的方向盘轮缘所具有的结构可以具有若干区段或部分,其中,至少一个部分或区段在每个空间方向上延伸(至少一个区段在x方向上延伸、至少一个区段在y方向上延伸、至少一个区段在z方向上延伸)。优选地,非平面的方向盘轮缘包括大致在x方向上延伸的至少两个区段、大致在y方向上延伸的至少两个区段、以及大致在z方向上延伸的至少两个区段。优选地,非平面的方向盘轮缘包括大致在x方向上延伸的若干区段、大致在y方向上延伸的若干区段、以及大致在z方向上延伸的若干区段。非平面构型还可以被描述成使得方向盘轮缘所包括的彼此相邻的区段在每个空间方向上相对于彼此成角度或倾斜。换言之,非平面可以指方向盘轮缘的至少一部分位于第一平面上或跨越该第一平面,而方向盘轮缘的至少另一部分位于至少一个第二平面上或跨越该至少一个第二平面,该至少一个第二平面与该第一平面相交。
7、非平面的方向盘轮缘可以至少部分地围绕仪表板曲率环绕,从而可以得到内部空间增益。特别地,可以在方向盘系统处于缩回状态下识别出内部空间增益。非平面的方向盘轮缘可以被配置成与仪表板的相对的一部分完全或部分地互补。因此,在完全缩回状态下,非平面的方向盘轮缘可以至少部分地或完全抵接对应仪表板部分的一个或多个区段。
8、进一步地,设置非平面的方向盘轮缘可以提高针对驾驶员的人体工程学。
9、方向盘轮缘具有的总旋转角度可以小于720°、优选地为600°或更小、优选地为580°或更小、更优选地为570°或更小、仍更优选地为550°或更小。与已知的方向盘机构相比,该总旋转角有所减小。方向盘轮缘具有的总旋转角度甚至可以为450°或更小、优选地为400°或更小、更优选地为360°或更小。总旋转角度减小可以减少转向所需力度。进一步地,与方向盘机构的可缩回性组合,在从自动驾驶过渡到手动驾驶期间当自动驾驶车辆将车辆的控制移交回驾驶员时、即在方向盘从完全缩回状态过渡到伸出状态(以及反过来)期间方向盘的随时可用性可以得到改善。因此,可以确保驾驶员在任何情况下都可以安全地收回对方向盘的控制,即使在转弯或转向期间发生过渡的情况下也是如此。
10、方向盘轮缘绕其中心轴线的旋转可以被机械地限制于该总旋转角度。方向盘轮缘绕其中心轴线的旋转可以被电动地限制于该总旋转角度。
11、转向系统可以包括方向盘旋转限制装置,用于至少机械地限制方向盘轮缘的总旋转角度,即方向盘轮毂绕旋转轴线在两个圆周方向上的总旋转。
12、转向系统可以包括转矩反馈装置。转矩反馈装置可以被配置成向驾驶员提供转矩反馈,并且/或者可以被配置成电动地限制方向盘轮缘的总旋转角度。
13、在实施例中,方向盘系统可以配置(特别地,转矩反馈装置可以被控制)成在手动驾驶期间和自动驾驶期间提供不同的总旋转角度。总旋转角度可以在自动驾驶期间被最小化,并且总旋转角度可以在手动驾驶期间被最大化。手动驾驶期间的总旋转角度与自动驾驶期间的总旋转角度之间的比率可以为至少3:2、优选地为至少2:1、更优选地为至少5:2、仍更优选地为至少3:1、仍更优选地至少可以为至少10:3。
14、方向盘轮缘可以是至少部分弧形的。方向盘轮缘可以包括至少一个圆形区段、更确切地至少一个环形区段或者完全闭合的环。优选地,方向盘轮缘是基本上、即大部分弧形的。方向盘轮缘可以包括多个圆形区段或环形区段。
15、方向盘轮缘可以是镜像对称的。特别地,方向盘轮缘可以相对于包含方向盘轮缘和/或方向盘机构的中心轴线的对称平面是镜像对称的。这可以进一步有助于在过渡时段期间容易地重新收回对方向盘的控制,即使在转弯或转向情况期间也是如此。
16、所设置的构型将新型和有利构型与驾驶员所使用的已知结构最优地组合,以便最佳地确保驾驶员的安全。
17、方向盘轮缘可以包括至少一个上部部分,该至少一个上部部分相对于方向盘轮缘的中间部分沿朝向车辆仪表板的方向倾斜。方向盘轮缘可以包括至少一个底部部分,该至少一个底部部分相对于方向盘轮缘的中间部分沿朝向车辆仪表板的方向倾斜。这可以提供进一步的设计自由度,并且可以进一步增大用于乘员的内部空间。
18、方向盘轮缘的至少一部分可以朝向车辆的仪表板弯曲。因此,方向盘轮缘的至少一部分与方向盘轮缘的布置在驾驶员的舒适手部位置处的其他非弯曲部分相比背离驾驶员间隔得更远。因此,方向盘轮缘的该至少一部分可以具有增大的、优选地优化的焦距,与方向盘轮缘的非弯曲部分相比,该至少一部分更接近道路焦距。
19、转向系统所具有的最大转向比可以介于10:1与12:1之间。转向比可以描述方向盘机构、特别是方向盘轮缘的旋转或转向(以度为单位)相对于经转向车轮的旋转或转向(以度为单位)之间的比率。优选地,最大转向比可以介于8:1与10:1之间、更优选地介于6:1与8:1之间、仍更优选地介于5:1与6:1之间。最大转向比为5:1意味着无需将手从方向盘拿开就可以操作车辆,尤其是在开关和控制件保持在方向盘触手可及的范围内时。
20、转向系统可以具有不同的转向比。特别地,转向比可以从10:1与12:1之间到5:1与6:1之间可调节。转向比可以根据特定车辆、驾驶状况和/或环境状况在车辆操作期间从10:1与12:1之间到5:1与6:1之间可自动地调节。换言之,可以在车辆操作期间(藉由控制系统)自动地调节转向比。调节所根据的状况可以是车辆当前速度、当前离心力、交通量等。调节所根据的状况可以是与自动驾驶、手动驾驶或过渡状态相关的车辆操作状态。方向盘比可以是可调节的,使得最大转向比可以比最低转向比高20%与40%之间、优选地高25%与35%之间、更优选地高30%。
21、方向盘机构可以没有柱柄控制件。换言之,没有柱柄控制件可以指方向盘机构、即方向盘和方向盘轮毂两者上没有设置柱柄控制件或安装柱上的柄开关。
22、省略柱柄控制件/安装在柱上的柄开关提高了可缩回性,即增大了方向盘的最大可缩回性,这是因为方向盘的可缩回性不受任何柱柄控制件/安装在柱上的柄开关的限制。这在方向盘完全缩回的自动驾驶期间提供了驾驶员车厢内的空间优势。
23、省略柱柄控制件/安装在柱上的柄开关提高了非平面的方向盘轮缘结构的设计自由度,同时有助于安全操作性。方向盘机构的无柱柄控制件的构型在方向盘轮缘的旋转期间避免了非平面的方向盘轮缘(例如倾斜的部分)的部分与柱柄控制件之间的任何碰撞或接触。因此,在自动驾驶期间和手动驾驶期间均可以实现无障碍地操作方向盘。
24、由于没有柄开关,因此允许方向盘在缩回位置时具有设计整合性,从而为乘员提供更多的空间,同时由于没有柄,因此消除了旋转期间的可能干扰,从而允许方向盘充分旋转。
25、方向盘机构可以包括设置有多个方向盘控制件的方向盘中心部分,方向盘中心部分不可绕中心轴线旋转。方向盘中心部分可以包括布置在方向盘中心部分内的气囊模块。方向盘中心部分可以与转向系统支撑柱或定子固定地连接,从而不可绕中心轴线旋转。采用这种构型,方向盘中心部分就其旋转取向而言即使在方向盘旋转的状况下也保持静止。方向盘中心部分可以在旋转意义上完全静止(即不可旋转)。因此,无论方向盘的旋转取向如何,设置在中心部分上的控制件以及符号、显示器等(若适用的话)总是保持在同一旋转取向上,从而供驾驶员容易地使用,并且因此在任何情况下都能允许简单、直观并且因此安全地操作控制件。
26、方向盘中心部分可以包括方向盘中心块。更确切地,方向盘中心部分的面向车辆的驾驶员/背向车辆的仪表板的部件可以被形成为方向盘中心块。方向盘中心部分可以与方向盘轮毂和方向盘同轴地布置。
27、即使在其中转向系统具有最大化的可缩回性并且因此最大缩回行程增加的实施例中,也可以通过确保包括气囊模块的中心部分在旋转意义上静止并且不改变其旋转取向来提高系统的安全操作性。即使在从自动驾驶过渡到手动驾驶期间,当自动驾驶车辆将车辆控制移交回驾驶员时、即在方向盘从完全缩回状态过渡到伸出状态(以及反过来)期间,中心部分也在旋转意义上静止。因此,可以确保方向盘控制件对驾驶员随时可用。
28、此外,通过确保包括气囊模块的中心部分在旋转意义上静止并且不会改变其旋转取向,可以实现气囊有效且正确的展开。因此,可以设置安装在方向盘上的气囊,并且无需将驾驶员侧的气囊重新定位在使得气囊的有效性未知的非传统位置。
29、这可以确保驾驶员以直观的方式连续使用所有的控制件并且确保了气囊正确展开,而无论方向盘是处于手动驾驶位置、缩回的自动驾驶位置还是处于中间过渡位置。这可以提高自动驾驶车辆的可接受性和安全性,尤其是因为从手动驾驶过渡到自动驾驶以及反过来的情况构成了与驾驶员相关的关键情况。
30、在实施例中,中心部分、特别是中心块的取向可以是可调节的。为此,中心部分可以可枢转地支撑在转向系统支撑柱内部,从而可绕横向于中心轴线的轴线枢转。中心部分可以通过接头或铰链机构附接至转向系统支撑柱或定子。因此,虽然不可相对于中心轴线旋转(在旋转意义上静止),但是中心部分可以是可枢转的、优选地可上下枢转。因此,可以依据或根据方向盘机构的缩回/伸出位置来调节中心部分的枢转取向(或上下取向),以便使气囊模块的展开方向和方向盘控制件朝向驾驶员定向。中心部分、特别是中心块的取向可以是可自动调节的。中心部分、特别是中心块的取向可以是可被动或主动调节的。可被动调节可以指通过使转向系统支撑柱相对于车身移动的致动器来引起中心部分移动/枢转。可主动调节可以指通过主动地使中心部分独立于转向系统支撑柱相对于车身的移动而机械地移动的附加致动器来引起中心部分移动/枢转。
31、方向盘控制件可以包括以下控制件中的至少一种或多种:一个/多个转向信号控制件、一个/多个灯控制件、一个/多个喇叭控制件、一个/多个驾驶员辅助控制件、一个/多个信息娱乐控制件、一个/多个刮水器控制件、和/或一个/多个巡航控制件。特别地,在传统方向盘组件中以柱柄控制件的形式提供的控制件可以被设置为在方向盘中心部分、即方向盘中心块上的方向盘控制件。
32、方向盘控制件可以根据其相应功能而具有不同的技术构型。单个或所有的方向盘控制件可以被形成为单击按钮、多击按钮、触敏按钮、模拟旋钮、数字旋钮、单稳态杆和/或多稳态杆。按钮可以是压力敏感型按钮。对于数字按钮、比如数字旋钮,按钮的位置可以在插入钥匙时重置。设置在方向盘中心部分上的杆所具有的枢转轴线可以在空间中的任何位置处。
33、在实施例中,可以在方向盘、优选地至少一个轮辐上布置至少一个附加控制件和/或至少一个显示单元。在这种情况下,控制件(和显示器)既可以设置在方向盘的非旋转部分上也可以设置在方向盘的旋转部分上。
34、优选地,没有控制件被配置为柱柄开关,并且没有控制件布置在方向盘轮毂的圆周表面上。优选地,转向系统的所有控制件都设置在转向系统的面朝驾驶员、即背向车辆的仪表板的一侧。优选地,没有控制件布置在方向盘与车辆的仪表板之间的方向盘机构上。
35、转矩反馈装置可以包括具有转子和定子的电机。转子可以附接至方向盘轮毂并且可以与方向盘轮毂(和方向盘)一起可绕中心轴线旋转。
36、定子可以固定地附接至转向系统支撑柱、优选地该柱的沿中心轴线延伸的区段,其中,转向系统支撑柱不可绕中心轴线旋转。换言之,转向系统支撑柱可以在旋转意义上静止或在旋转意义上固定、即可以不可绕任何纵向轴线旋转。
37、根据实施例,方向盘轮缘可以设置有安装在方向盘轮缘上的至少一个显示单元。特别地,方向盘轮缘的非平面结构可以提供适合于显示单元布置的区段。优选地,方向盘轮缘可以设置有至少两个显示单元。多个显示单元允许在不同的显示单元上显示不同的信息。该至少一个显示单元可以是触摸屏。在这种情况下,控制件可以通过该至少一个显示单元实现。
38、该至少一个显示单元可以设置在面向驾驶员的前表面的区域中、特别是方向盘轮缘的朝向车辆的仪表板倾斜或弯曲的至少一部分中。
39、特别地,该至少一个显示单元可以布置在方向盘轮缘的倾斜的上部部分或倾斜的底部部分上。将该至少一个显示单元安装在沿朝向仪表板、即背离驾驶员的方向倾斜的部分上可以增大焦距。这可以有助于得到该至少一个显示单元、更确切地该至少一个显示单元所显示的信息和/或控制的最优可感知性。因此,这可以进一步提高乘客和驾驶的总体安全性。
40、该至少一个显示单元可以具有圆形区段的形状。采用这种结构构型,该至少一个显示单元可以最优地整合在至少部分圆形/环形的方向盘轮缘中。
41、在实施例中,方向盘轮缘可以设置有开放的顶部部分和/或开放的底部部分。在这种情况下,方向盘轮缘可以被配置成呈一个或两个开放的环形区段的形式。
42、根据实施例,方向盘的优选地面向车辆的仪表板的后表面可以被形成为与面向方向盘的后表面的仪表板前表面至少部分地互补。这种构型可以进一步有助于提高方向盘机构的最大可缩回性并且可以有助于得到驾驶员车厢的和谐设计。优选地,后表面可以被形成为使得在方向盘机构处于完全缩回状态时,方向盘的后表面的至少40%、优选地至少50%、更优选地至少60%、仍更优选地至少70%抵接仪表板前表面。
43、根据实施例,转向系统可沿中心轴线轴向地移动(并且可平移地移动),使得方向盘机构能够可逆地沿朝向仪表板的方向缩回并且沿背离车辆的仪表板的方向伸出。这构成了用于实现转向系统的受控且快速的可缩回性的特别简单的构型。
44、方向盘机构具有的缩回行程(并且因此也具有的相应伸出行程)可以介于50mm与150mm之间、优选地介于60mm与120mm之间、更优选地介于80mm与100mm之间。因此,转向系统可针对不同的驾驶员最优地调节,并且可以在自动驾驶期间在驾驶员车厢内部提供充足的空间。缩回行程可以是除用于调节车辆位置的调节行程之外的行程。调节行程可以介于50与70mm之间。因此,总轴向行程可以介于100mm与220mm之间。总行程甚至可以为300mm。
45、在实施例中,气囊模块、更确切地气囊模块中心轴线可以被定位成与方向盘机构的中心轴线偏离。替代性地,气囊模块、更确切地气囊模块中心轴线被布置成与方向盘机构的中心轴线同轴或与方向盘机构的中心轴线匹配。
46、气囊模块可以布置在方向盘中心部分上或部分地布置在其内部,其方式为使得气囊模块中心轴线不与方向盘机构的中心轴线平行。替代性地,气囊模块、更确切地气囊模块中心轴线被布置成与方向盘机构的中心轴线平行。
47、可以基于方向盘的其他部件(比如方向盘轮缘)的大小和形状或者基于方向盘的总体构型来选择气囊模块的位置和取向,以便确保气囊正确地展开。
48、根据实施例,转子可以是外部转子,并且定子可以是内部定子。相应地,在该实施例中,方向盘轮毂固定地附接至外部转子,其中,方向盘轮缘经由至少一个轮辐与方向盘轮毂固定地连接。方向盘轮缘和该至少一个轮辐可以一体地形成。方向盘轮毂和该至少一个轮辐可以一体地形成。
49、转向系统可以包括与方向盘机构连接的转向系统支撑柱。
50、在实施例中,转向系统支撑柱可以形成管状伸缩机构的内部构件,其中,内部构件可相对于管状伸缩机构的外部构件平移地移动、不可相对于管状伸缩机构的外部构件旋转和枢转。特别地,管状伸缩机构可以是两件式、三件式或多件式伸缩机构,即具有至少两个区段或构件(即一个外部区段或构件和一个内部区段或构件)的伸缩机构。伸缩机构提供了简单且坚硬的构型。优选地,管状伸缩机构可以是三件式伸缩机构,即伸缩机构具有三个区段或构件:一个外部区段或构件、一个中间区段或构件、以及一个内部区段或构件(其可以是转向系统支撑柱)。转向系统支撑柱可以由两个或更多个固定连接的构件形成。
51、内部构件相对于管状伸缩机构的外部构件的平移移动、即滑动可以由被配置成作用在内部构件上的呈电动马达形式的致动器来引起。
52、优选地,管状伸缩机构的外部构件可以是车辆支撑柱,转向系统支撑柱经由该车辆支撑柱附接至车身。通过使车辆支撑柱可相对于车身枢转和/或径向地移位而使该车辆支撑柱(以及附接于该车辆支撑柱的方向盘支撑柱和方向盘机构)相对于车身可以是可调节的。因此,方向盘机构可针对不同的驾驶员单独地调节。
53、根据实施例,方向盘轮缘可以包括被配置成检测驾驶员的手/手指与方向盘的接触的至少一个传感器、优选地多个传感器。转向系统(或者更确切地转向系统的控制系统)可以被配置成当缩回行程达到预定阈值(例如方向盘与仪表板之间的预定最小距离)并且同时该至少一个传感器检测到驾驶员的手/手指接触方向盘时自动地结束方向盘机构的缩回。因此,可以安全地防止手指由于方向盘缩回而卡住。
54、根据实施例,方向盘轮缘可以包括被配置成检测驾驶员的手/手指与方向盘的接触的至少一个传感器、优选地多个传感器。该至少一个传感器可以被配置成在检测到驾驶员的手和/或手指与需要被缩回的方向盘达到预定最小接触之后,转向系统(或者更确切地转向系统的控制系统)发起或允许从自动驾驶过渡到手动驾驶。因此,可以确保驾驶员准备好并且希望重新获得车辆转向的控制。这进一步有助于驾驶员的安全。
55、用于检测驾驶员的手/手指与方向盘接触以防止驾驶员的手指卡住的一个/多个传感器可以是与用于检测驾驶员的手/手指与方向盘接触以发起或允许从自动驾驶过渡到手动驾驶的一个/多个传感器相同或不同的一个/多个传感器。
56、根据实施例,转向系统支撑柱可以包括离轴区段,该离轴区段具有第一纵向轴线,该第一纵向轴线与方向盘机构的中心轴线偏离、优选地平行,并且该转向系统支撑柱可以包括对准区段,该对准区段具有第二纵向轴线,该第二纵向轴线与方向盘机构的中心轴线对应。与方向盘机构的中心轴线对应还可以被描述为与旋转轴线对准或同轴。离轴区段和对准区段可以是单独形成但是固定地连接的部件。离轴区段和对准区段可以通过连接部分固定地连接。连接部分可以是另一单独部件或者可以与离轴区段或对准区段一体地形成。方向盘轮毂可以可旋转地安装在对准区段上,并且因此可以在轴向方向上至少部分地与对准区段重叠。离轴区段可以在轴向上与方向盘轮毂间隔开。
57、转矩反馈装置的定子可以不可旋转地固定至转向系统支撑柱的对准区段。
58、优选地,对准区段可以形成轮毂元件,该轮毂元件相对于转子和方向盘轮毂静止并且承载外部转子电机的内部定子。
59、转向系统支撑柱包括离轴区段和轴线对准区段、组合有布置在对准区段上的转矩反馈装置的这种结构设计优化了安装空间的使用,同时易于方向盘机构的可伸缩性,并且同时降低了由于转矩产生/传递而引起的摩擦和惯性。
60、因此,所描述的转向系统支撑柱设计和转矩反馈装置的组合有助于得到结构上优化的构型。
61、连接部分可以横向于第一纵向轴线和第二纵向轴线两者延伸。
62、离轴区段、对准区段和/或连接部分可以是管状的。特别地,离轴区段、对准区段和连接部分中的每一个都可以是管状的。离轴区段、对准区段和/或连接部分可以至少部分地具有大致矩形的或圆形的截面。替代性地,离轴区段、对准区段和/或连接部分可以具有任何其他截面形状。例如,离轴区段、对准区段和/或连接部分可以具有椭圆形或多边形截面。多边形截面可以是有利的,因为提供了一些平坦表面,在伸缩机构的轴向滑动部分与固定部分之间提供了角度参考,以防止二者围绕第一纵向轴线相对于彼此旋转。离轴区段、对准区段和连接部分的截面形状可以相同或者可以不同。
63、根据实施例,转向系统支撑柱可以包括优选地布置在离轴区段或连接部分中的开口,该开口提供通向将电机和/或至少一个传感器与电子控制单元连接的电机相连接件和/或方向盘角度传感器连接件的通路。传感器可以是方向盘角度传感器。因此,方向盘旋转限制装置、特别是可移除地附接的方向盘旋转限制装置可以使得能够通向电连接件,用于维修和维护目的,并且同时可以安全地保护电连接件和部件免受破坏性的环境影响。
64、根据实施例,转向系统可以包括电子控制单元,该电子控制单元至少用于控制转矩反馈装置和/或接收和传输传感器信息、比如来自方向盘角度传感器的信息。电子控制单元可以布置在转向系统支撑柱的离轴区段内部、优选地在邻近于或跟着连接部分的区域中。在这种情况下,电子控制单元可以被布置成靠近转矩反馈电机的定子绕组和/或靠近一个/多个传感器、比如用于测量电机转子的旋转的旋转角度传感器。
65、方向盘中心部分包括气囊模块,该气囊模块可以被布置成至少部分地在转向系统支撑柱的对准区段内部和/或可以由该对准区段形成,并且因此在转矩反馈电机的定子内部。
66、在实施例中,转向系统可以包括附加的辅助部件,这些附加的辅助部件布置在转向系统支撑柱的对准区段内部,并且因此在转矩反馈电机的定子内部。这些附加的辅助部件可以包括开关装置控制件、驾驶员显示器机构和/或线束。通过将辅助部件布置在转向系统支撑柱内部,可以高效地使用安装空间,即可以减小转向系统所需的总体安装空间。
67、根据实施例,转向系统支撑柱的对准区段可以设置有突出的凸缘部分,该突出的凸缘部分提供用于布置在转向系统支撑柱与方向盘轮毂之间的第一轴承机构的第一支承表面。优选地,突出的凸缘部分可以布置在对准区段与连接部分之间的过渡区域中、即对准区段的背向连接有或可连接转向系统的方向盘的端部部分中。突出的凸缘部分提供圆环形第一支承表面。藉由突出的凸缘部分,对准区段的主要部分的外径可以被最小化,同时仍然支撑具有大得多的内径的方向盘轮毂。
68、转向系统支撑柱的对准区段可以包括圆环形部分,该圆环形部分提供用于布置在转向系统支撑柱与方向盘轮毂之间第二轴承机构的圆环形第二支承表面。优选地,圆环形部分可以被布置成至少在跟着或邻近于连接有或可连接转向系统的方向盘的区域中,换言之,至少在背向离轴区段和连接部分的区域中。藉由圆环形部分,可以自由选择对准区段的主要部分的外部形状/轮廓,同时仍然可旋转地支撑方向盘。
69、第一轴承机构和第二轴承机构可以实现将方向盘轮毂以及与该方向盘轮毂连接的方向盘可旋转地支撑在转向系统支撑柱上。
70、方向盘旋转限制装置可以经由方向盘旋转限制装置的基部附接至离轴区段,并且可以经由滑动元件与方向盘轮毂接合。
71、方向盘旋转限制装置的基部包括两个在轴向上相对的端部止挡表面,并且滑动元件相对于基部和方向盘轮毂在这两个相对的端部止挡表面之间平行于旋转轴线轴向地滑动。滑动元件可以包括突起、特别是螺旋脊部,该突起与形成在方向盘轮毂的外部圆周表面上的螺旋凹槽接合,使得方向盘轮毂的旋转引起滑动元件轴向移动,并且使得滑动元件与这两个端部止挡表面中的一个抵接会阻止滑动元件进一步移动、并且因此阻止方向盘轮毂进一步旋转。
72、方向盘旋转限制装置的基部可以在相对于旋转轴线的轴向方向上与突出的凸缘部分重叠、并且因此与第一支承表面重叠。因此,可以实现转向系统结构的有利、紧凑的设计。
73、基部可以包括形成在其中的隔室,该隔室容纳滑动元件,并且因此抑制滑动元件沿背离方向盘轮毂的方向的径向移动以及滑动元件横向于其轴向移位的方向的侧向移动。隔室仅可以允许滑动元件在两个相对的端部止挡表面之间的轴向移动。
74、基部可以被布置成在径向上邻近于方向盘轮毂,使得基部以及方向盘轮毂的外部圆周表面完全围封隔室。
75、转向系统可以被配置成使得在滑动元件抵接两个相对的端部止挡表面中的一个的状况或位置时,突起仍然与螺旋凹槽的两个端部部分间隔开、优选地间隔限定距离或螺旋凹槽的限定区段。因此,方向盘轮毂的旋转限制不通过突起的部分与螺旋凹槽的端部部分相互作用而引起,而是通过滑动元件的表面与两个端部止挡表面中的一个抵接而引起。因此,与已知的解决方案相比,抵接表面积可以增大,从而防止了对转向系统、特别是螺旋凹槽和突起的损坏,即使在强大外力影响的情况下也是如此。
76、在实施例中,转矩反馈装置可以被配置成当滑动元件与两个端部止挡表面中的一个之间的最小距离下降到预定阈值以下时提高转矩反馈等级。在这种情况下,在滑动元件与两个端部止挡表面中的一个的抵接完全和急剧阻止方向盘轮毂/方向盘进一步旋转之前就可使方向盘轮毂/方向盘的旋转减速到某种程度。可以针对两个端部止挡表面中的每一个限定阈值。
77、方向盘可以通过固定元件直接或间接地机械地附接至方向盘轮毂。例如,固定元件可以包括螺栓、螺钉、铆钉、螺母、粘合和/或型锻(压制和/或变形)。优选地,可以将总数量为三个到十个的螺钉距离围绕方向盘和方向盘轮毂的旋转轴线等距布置。
78、相对于方向盘机构的中心轴线,固定元件可以与定子绕组布置在不同的径向位置、即径向高度处。换言之,当关于方向盘机构的中心轴线观察时,固定元件可以与定子绕组布置在不同的径向高度处,即固定元件与方向盘机构的中心轴线的径向距离可以不同于定子绕组与中心轴线的径向距离。
79、为转矩反馈装置设置外部转子电机并且将固定元件与定子绕组布置在不同的径向位置处实现了线控转向转向系统的有利、紧凑的设计,该设计减少了所需的安装空间。
80、固定元件的一部分可以相对于方向盘机构的中心轴线与定子绕组的一部分轴向地重叠。特别地,每个固定元件的一部分或者仅一个或特定固定元件的一部分可以相对于方向盘机构的中心轴线与定子绕组的一部分轴向地重叠。可以通过将固定元件与定子绕组布置在不同的径向位置处来实现这种布置。因此,可以将固定元件的至少一部分布置成与定子绕组平行,这进一步有助于实现转向系统的紧凑结构。
81、相对于方向盘机构的中心轴线,固定元件可以与第一轴承机构布置在不同的径向位置处;并且/或者固定元件可以与第二轴承机构布置在不同的径向位置。这种布置还可以使得能够重叠/平行地布置转向系统的部件,这进一步有助于实现转向系统的紧凑设计以及减小的安装空间需求。
82、另一个方面涉及一种包括仪表板和上述类型的转向系统的用于车辆的布置。
83、仪表板的前表面可以被形成为与方向盘的后表面至少部分地互补。因此,仪表板和方向盘的相对的表面可以被形成为至少部分地互补。这种构型可以进一步有助于提高方向盘机构的最大可缩回性并且可以有助于得到驾驶员车厢的和谐设计。
84、在实施例中,方向盘轮毂可以至少部分地或完全缩回到形成在仪表板中的对应凹部中。
85、尽管已经针对一个方面描述了一些特征、功能、实施例、技术效果和优点,但是应当理解,这些特征、功能、实施例、技术效果和优点可以彼此组合,也适用于其他实施例和方面。
- 还没有人留言评论。精彩留言会获得点赞!