一种磁轮吸附式水下MIG焊接机器人
本发明涉及水下焊接机器人,更具体地说,涉及一种磁轮吸附式水下mig焊接机器人。
背景技术:
1、当前水下焊接的主流实现方式是依靠人工完成,安全性和焊接效率得不到保障;人工水下焊接受限于水深和水压,无法有效完成大型基建项目和船舶等领域的焊接任务。同时,焊接作业过程涉及强电,潜水焊接作业人员的安全性会受到复杂水下工况的影响而降低。
2、目前,行业内的水下焊接机器人研究受限,无法满足当前的水下焊接需求。现有水下焊接机器人以浮游式和履带式为主,体积较大,设备复杂。浮游式机器人由于其在焊接过程中的固定机构较为复杂,导致稳定性降低,进而影响焊接成形工艺。履带式机器人质量较大,移动时振动较强烈,不利于焊接机构的定位。此外,焊丝采用远距离输送,送丝速度不稳定,影响焊接效果。
3、针对上述问题,急需在当前水下焊接设备的基础上进行创新。
技术实现思路
1、为克服现有技术中的缺点与不足,本发明的目的在于提供一种磁轮吸附式水下mig焊接机器人;该焊接机器人可实现在复杂几何金属面的有效移动,移动稳定性良好,有利于提高焊接工艺,能以稳定的送丝速度控制焊丝沿着线缆输送至熔池以保证焊缝成形效果。
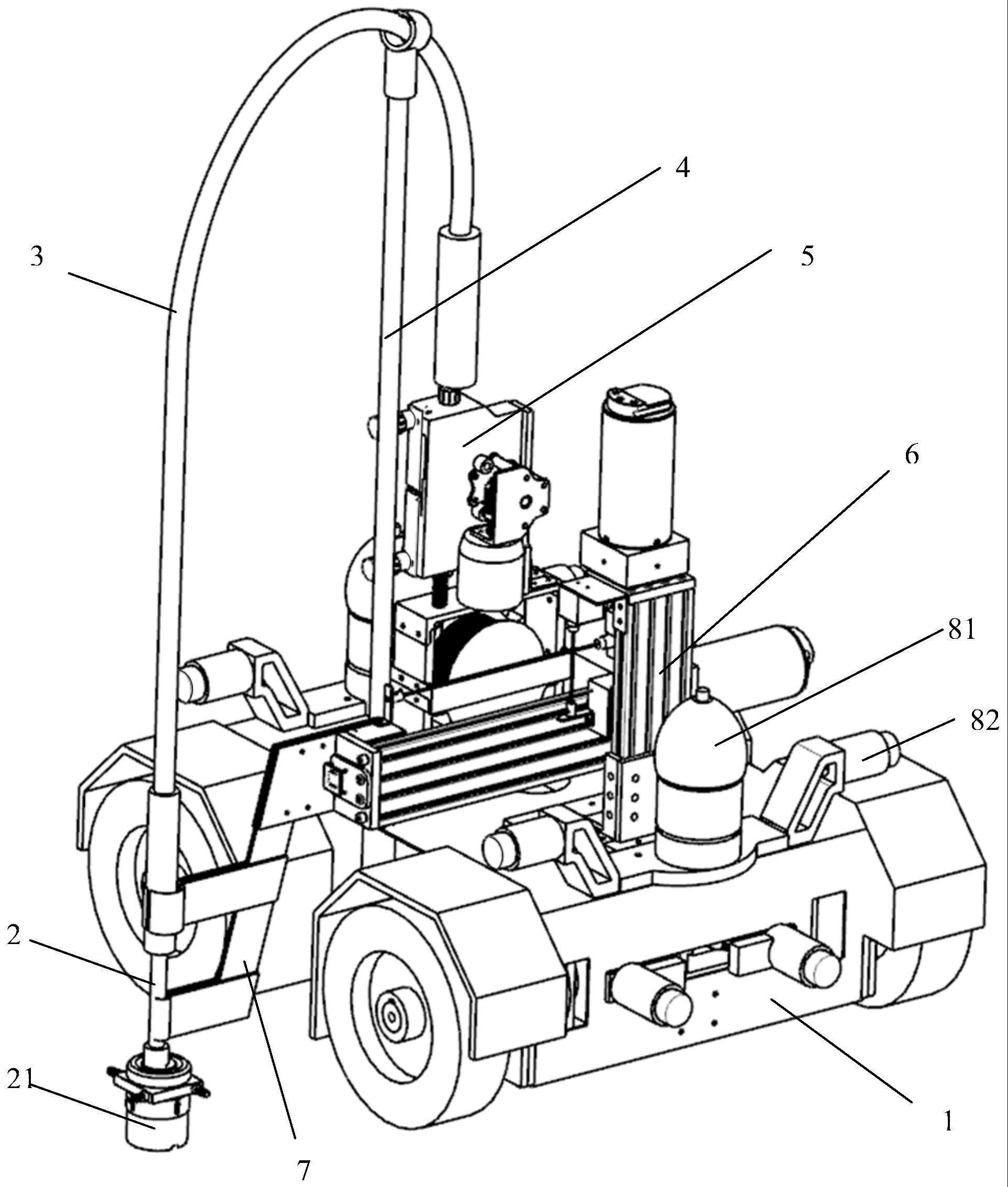
2、为了达到上述目的,本发明通过下述技术方案予以实现:一种磁轮吸附式水下mig焊接机器人,其特征在于:包括磁吸附小车、送丝装置、焊枪移动装置和焊枪;所述送丝装置和焊枪移动装置分别设置在磁吸附小车上;所述焊枪位于磁吸附小车的一侧;焊枪移动装置通过焊枪臂与焊枪连接,以实现焊枪升降和水平移动;焊枪还通过线缆与送丝装置连接,以实现送丝装置的焊丝输入焊枪。
3、本发明焊接机器人的工作原理是:首先将整体焊接机器人吸附在过渡金属板上,磁吸附小车沿着过渡金属板移动至待焊接区域(如船体、核乏燃料池等);移动至待焊接区域后,通过控制磁吸附小车和焊枪移动装置调整焊枪与待焊接区域的相对位置,根据焊缝形状和路径,焊枪进行焊接工作,同时送丝装置将焊丝输送至熔池中。
4、本发明焊接机器人,采用磁吸附方式行走,可实现在复杂几何金属面的有效移动,移动稳定性良好,有利于提高焊接工艺;在磁吸附小车上设有送丝装置,送丝装置以稳定的送丝速度控制焊丝沿着线缆输送至熔池以保证焊缝成形效果。
5、优选地,所述送丝装置包括焊丝架、设置在焊丝架上方的送丝机总成、送丝机动力电机、焊枪支撑件和用于缠绕焊丝的焊丝盘;焊丝盘设置在焊丝架中;
6、所述送丝机总成包括总成架体、两个焊丝引导嘴、中心焊丝引导件、主动齿轮、两个从动齿轮、两个从动滑轮和两个压紧轮;送丝机动力电机与主动齿轮连接,主动齿轮分别与两个从动齿轮啮合,两个从动滑轮分别与两个从动齿轮同轴连接;中心焊丝引导件位于两个焊丝引导嘴之间;两个焊丝引导嘴和中心焊丝引导件分别位于焊丝输出路径上;其中一个从动滑轮位于其中一个焊丝引导嘴和中心焊丝引导件之间,另一个从动滑轮位于另一个焊丝引导嘴和中心焊丝引导件之间;两个压紧轮分别与两个从动滑轮位置相对,压紧轮与从动滑轮分别位于焊丝输出路径的两侧。
7、上述方式的送丝装置,可有效将焊丝稳定地向外输送,提升焊缝质量。
8、优选地,送丝机动力电机是指水密电机;水密电机通过蜗轮和蜗杆与主动齿轮连接。由于水密电机具有防水功能,可在水下使用,蜗轮和蜗杆自身不带电,因此该设计可避免对送丝装置做整体密封而导致的体积和质量过大。
9、优选地,所述压紧轮通过摆动架可摆动地设置在总成架体上,以实现压紧轮与从动滑轮之间的距离调节;摆动架与总成架体之间设有固定结构。摆动架打开后可便于进行焊丝更换等操作。
10、优选地,所述焊枪移动装置包括设置在磁吸附小车上的丝杠安装座、设置在丝杠安装座上的竖直丝杠组件、水平丝杠组件,以及分别用于带动竖直丝杠组件和水平丝杠组件工作的两个丝杠动力电机;水平丝杠组件的座体与竖直丝杠组件的活动端连接;所述水平丝杠组件的活动端与焊枪臂连接。焊枪移动装置配合磁吸附小车,可实现焊枪在空间范围内的四个自由度运动,有利于针对复杂焊接曲面开展水下焊接工作。相比采用机械臂,本发明焊枪移动装置中,控制焊枪移动的执行机构主体部分位于磁吸附小车中部,更容易保证焊接机器人整体重心不发生偏移;丝杠组件运动精度很高,可确保焊枪在三维平动上的线性精度。
11、优选地,所述磁吸附小车上设有焊枪支撑件;焊枪支撑件顶部设有空心环将所述线缆托起呈一定弧度。线缆托起呈一定弧度,有利于送丝装置将焊丝以最小的阻力外送焊接。
12、优选地,所述焊枪臂包括连接块、倾斜连杆和两个以上水平连杆;所述连接块与水平丝杠组件的活动端连接;倾斜连杆倾斜连接于连接块的下方;各个水平连杆水平连接于倾斜连杆远离磁吸附小车的一侧。
13、优选地,所述焊枪移动装置还包括用于检测水平丝杠组件活动端位置的水平测距传感器和用于检测竖直丝杠组件活动端位置的竖直测距传感器。水平测距传感器和竖直测距传感器可防止水平丝杠组件和竖直丝杠组件之间发生碰撞,提高工作安全性。
14、优选地,所述磁吸附小车包括底盘主体、两个主动磁力轮、两个从动磁力轮、两个底盘动力电机;两个底盘动力电机按原点对称安装于底盘主体内部;两个主动磁力轮分别安装于底盘主体两侧;两个从动磁力轮分别安装于底盘主体两侧;两个底盘动力电机的动力输出分别通过同步带轮和同步带由主动磁力轮传至从动磁力轮。采用两个主动磁力轮和两个从动磁力轮共四个磁力轮确保焊接机器人能够完整附着在待焊接材料表面,且通过左右两侧磁力轮的速度分配,可实现焊接机器人在复杂几何金属面的有效移动。
15、优选地,所述磁吸附小车的前后两侧分别设有全景摄像头;全景摄像头的两侧分别对称设有超声波探头;磁吸附小车靠近焊炬的一侧设有焊炬监测摄像头。全景摄像头和超声波探头可检测周围环境图像和数据,提高了焊接机器人在复杂水下工况运动的环境感知力,而焊炬监测摄像头实时反馈焊缝成形图像为参数调整提供实际参考。
16、与现有技术相比,本发明具有如下优点与有益效果:
17、1、本发明焊接机器人,采用磁吸附方式行走,可实现在复杂几何金属面的有效移动,移动稳定性良好,有利于提高焊接工艺;在磁吸附小车上设有送丝装置,送丝装置以稳定的送丝速度控制焊丝沿着线缆输送至熔池以保证焊缝成形效果;
18、2、本发明焊接机器人,送丝装置可有效将焊丝稳定地向外输送,提升焊缝质量;采用水密电机通过蜗轮蜗杆将动力传输至主动齿轮,可避免对送丝装置做整体密封而导致的体积和质量过大;
19、3、本发明焊接机器人,磁吸附小车配合焊枪移动装置可实现焊枪在空间范围内的四个自由度运动,有利于针对复杂焊接曲面开展水下焊接工作;控制焊枪移动的执行机构主体部分位于磁吸附小车中部,更容易保证焊接机器人整体重心不发生偏移;丝杠组件运动精度很高,可确保焊枪在三维平动上的线性精度。
技术特征:
1.一种磁轮吸附式水下mig焊接机器人,其特征在于:包括磁吸附小车、送丝装置、焊枪移动装置和焊枪;所述送丝装置和焊枪移动装置分别设置在磁吸附小车上;所述焊枪位于磁吸附小车的一侧;焊枪移动装置通过焊枪臂与焊枪连接,以实现焊枪升降和水平移动;焊枪还通过线缆与送丝装置连接,以实现送丝装置的焊丝输入焊枪。
2.根据权利要求1所述的磁轮吸附式水下mig焊接机器人,其特征在于:所述送丝装置包括焊丝架、设置在焊丝架上方的送丝机总成、送丝机动力电机、焊枪支撑件和用于缠绕焊丝的焊丝盘;焊丝盘设置在焊丝架中;
3.根据权利要求2所述的磁轮吸附式水下mig焊接机器人,其特征在于:所述送丝机动力电机是指水密电机;水密电机通过蜗轮和蜗杆与主动齿轮连接。
4.根据权利要求2所述的磁轮吸附式水下mig焊接机器人,其特征在于:所述压紧轮通过摆动架可摆动地设置在总成架体上,以实现压紧轮与从动滑轮之间的距离调节;摆动架与总成架体之间设有固定结构。
5.根据权利要求1所述的磁轮吸附式水下mig焊接机器人,其特征在于:所述焊枪移动装置包括设置在磁吸附小车上的丝杠安装座、设置在丝杠安装座上的竖直丝杠组件、水平丝杠组件,以及分别用于带动竖直丝杠组件和水平丝杠组件工作的两个丝杠动力电机;水平丝杠组件的座体与竖直丝杠组件的活动端连接;所述水平丝杠组件的活动端与焊枪臂连接。
6.根据权利要求5所述的磁轮吸附式水下mig焊接机器人,其特征在于:所述磁吸附小车上设有焊枪支撑件;焊枪支撑件顶部设有空心环将所述线缆托起呈一定弧度。
7.根据权利要求6所述的磁轮吸附式水下mig焊接机器人,其特征在于:所述焊枪臂包括连接块、倾斜连杆和两个以上水平连杆;所述连接块与水平丝杠组件的活动端连接;倾斜连杆倾斜连接于连接块的下方;各个水平连杆水平连接于倾斜连杆远离磁吸附小车的一侧。
8.根据权利要求5所述的磁轮吸附式水下mig焊接机器人,其特征在于:所述焊枪移动装置还包括用于检测水平丝杠组件活动端位置的水平测距传感器和用于检测竖直丝杠组件活动端位置的竖直测距传感器。
9.根据权利要求1所述的磁轮吸附式水下mig焊接机器人,其特征在于:所述磁吸附小车包括底盘主体、两个主动磁力轮、两个从动磁力轮、两个底盘动力电机;两个底盘动力电机按原点对称安装于底盘主体内部;两个主动磁力轮分别安装于底盘主体两侧;两个从动磁力轮分别安装于底盘主体两侧;两个底盘动力电机的动力输出分别通过同步带轮和同步带由主动磁力轮传至从动磁力轮。
10.根据权利要求1所述的磁轮吸附式水下mig焊接机器人,其特征在于:所述磁吸附小车的前后两侧分别设有全景摄像头;全景摄像头的两侧分别对称设有超声波探头;磁吸附小车靠近焊炬的一侧设有焊炬监测摄像头。
技术总结
本发明提供了一种磁轮吸附式水下MIG焊接机器人,包括磁吸附小车、送丝装置、焊枪移动装置和焊枪;所述送丝装置和焊枪移动装置分别设置在磁吸附小车上;所述焊枪位于磁吸附小车的一侧;焊枪移动装置通过焊枪臂与焊枪连接,以实现焊枪升降和水平移动;焊枪还通过线缆与送丝装置连接,以实现送丝装置的焊丝输入焊枪。该焊接机器人可实现在复杂几何金属面的有效移动,移动稳定性良好,有利于提高焊接工艺,能以稳定的送丝速度控制焊丝沿着线缆输送至熔池以保证焊缝成形效果。
技术研发人员:王振民,罗犇德,詹金桦,廖海鹏,张文旭,田济语,张芩,吴祥淼
受保护的技术使用者:华南理工大学
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!