机器人的腿部结构及机器人的制作方法
本发明涉及机械领域,尤其涉及一种机器人的腿部结构及机器人。
背景技术:
1、机器人作为一种能够半自主或全自主工作的智能机器,成为人工智能重点发展的一个研究领域,目前有部分足式机器人已投入实际运营或测试中,未来有望成为日常生活中常用的一种智能工具。
2、在现有的机器人,例如足式机器人中,由于足式机器人在使用的过程中,需要机器人的单腿末端能够精确的到达空间中的任何位置,因此,机器人的腿部结构通常具有3个自由度,从而能够精准控制机器人,使其到达任意位置。通常的足式机器人腿部构型是由3个电机来控制,但通常的足式机器人腿部构型存如下的缺点:由于通常机器人腿部的侧部分别设置有两个电机,因此随着机器人腿部的移动,控制机器人的电机会随之转动,从而导致机器人的主体部与电机连接的连接线,例如电线、通讯线等经常发生拉扯或缠绕等情况,以致于出现线路脱离或撕裂等损坏的情况,从而缩短了电机及其连接电路的使用寿命。
3、因此,如何提供一种机器人的腿部结构及机器人,以在不影响电机对腿部构件驱动的情况下,方便电机的位置布局,并提升电机的使用寿命,是本发明亟需解决的技术问题。
技术实现思路
1、本发明目的在于提供一种机器人的腿部结构及机器人,可以在不影响电机对腿部构件驱动的情况下,方便电机的位置布局,并提升电机的使用寿命。
2、为了实现上述目的,本发明提出了一种机器人的腿部结构,包括:用于构成足部的第一肢体构件;与所述第一肢体构件转动连接的第二肢体构件;
3、设置于机器人的主体部上的动力机构;
4、摇杆构件机构,一端与所述动力机构相连,另一端与所述第一肢体构件转动连接;
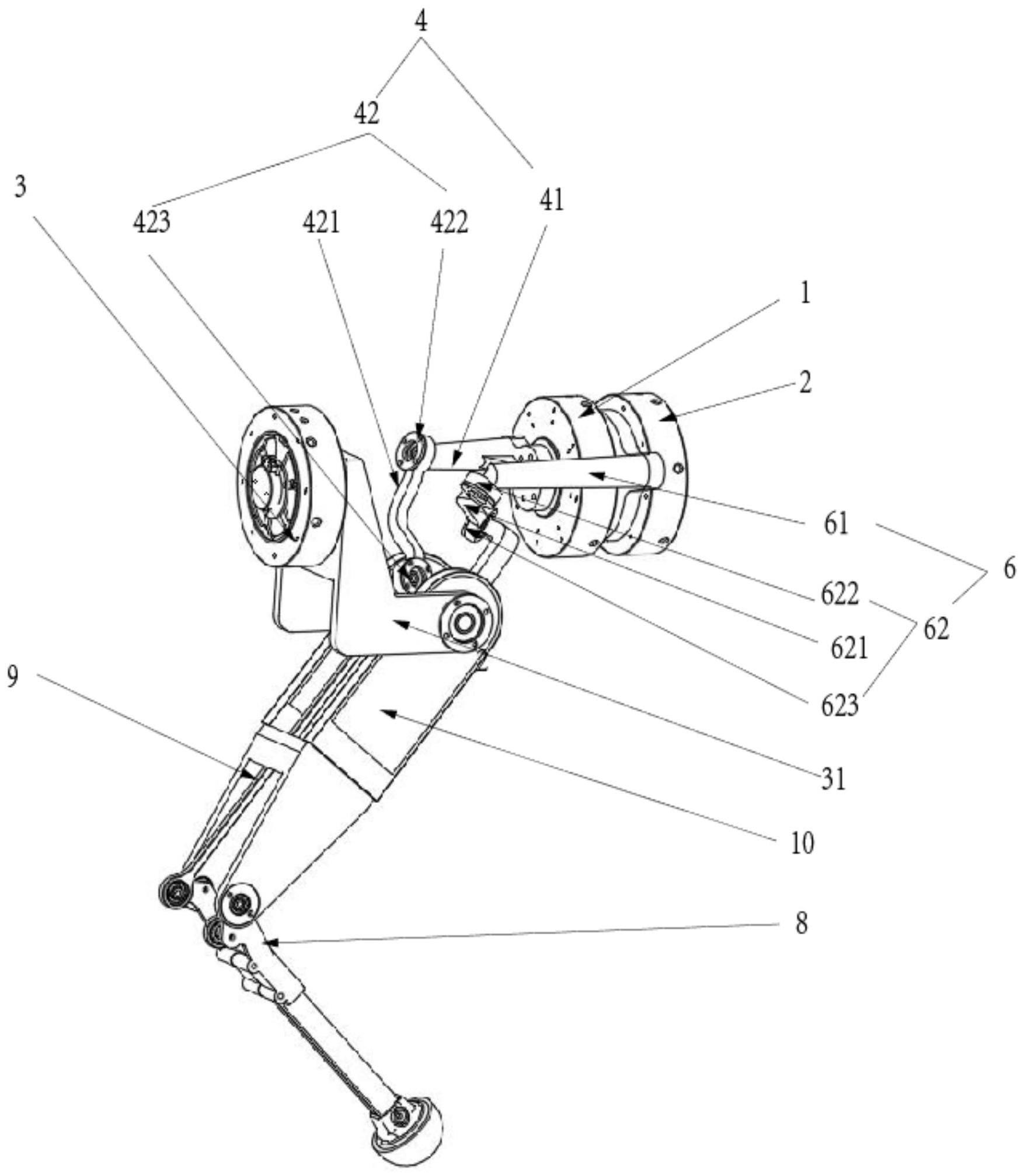
5、其中,所述动力机构包括:同轴设置的第一电机和第二电机、用于连接所述第一电机的驱动轴和所述摇杆构件机构的第一转接构件,以及用于连接所述第二电机的驱动轴和所述第二肢体构件的第二转接构件。
6、进一步作为优选地,还包括:第三电机、用于固定所述第三电机且与所述第二肢体构件转动连接的固定座;其中,所述第三电机的驱动轴与所述第一电机的驱动轴和所述第二电机的驱动轴同轴输设置,并用于在所述第三电机的驱动轴转动时,带动所述固定座、所述第一肢体构件以及所述第二肢体构件作同步的侧向摆动。
7、进一步作为优选地,所述第一转接构件包括:用于连接所述第一电机的驱动轴的驱动部的第一连接轴件、相对两端分别与所述第一连接轴件和所述摇杆构件机构枢转连接的第一转动件;所述第一转动件包括:开设有第一轴承孔的第一端、开设有第二轴承孔的第二端、与所述第一端和所述第二端相连的折弯连杆。
8、进一步作为优选地,所述第二转接构件包括:用于连接所述第二电机的驱动轴的驱动部的第二连接轴件、相对两端分别与所述第二连接轴件和所述第二肢体构件枢转连接的第二转动件;其中,所述第二转动件包括:开设有第一轴套孔的第一端部、开设有第二轴套孔的第二端部、与所述第一端部和所述第二端部相连的折弯部。
9、进一步作为优选地,所述第一转动件还包括:分别设置于对应的轴承孔内的轴承套,以及用于将所述轴承套封闭在对应的轴承孔内的端盖;其中,所述第一连接轴件的端部具有一倾斜设置且用于插入所述第一轴承套内的第一转轴头;所述摇杆构件机构的端部具有一倾斜设置且用于插入所述第二轴承套内的第二转轴头。
10、进一步作为优选地,所述第二转动件还包括:分别设置于对应的轴套孔内的轴套,以及用于将所述轴套封闭在对应的轴套孔内的盖体;所述第二连接轴件的端部具有一倾斜设置且用于插入第一轴套内的第一连接头;所述第二肢体构件的端部具有一倾斜设置且用于插入第二轴套内的第二连接头。
11、进一步作为优选地,所述折弯连杆的折弯度数为90度;所述折弯部的度数为90度。
12、进一步作为优选地,第一电机的驱动轴的轴线与和所述摇杆构件用于与第二肢体构件枢转连接的枢转轴的转动轴线之间的夹角为90度。
13、进一步作为优选地,第二电机的驱动轴的轴线与所述第二肢体构件的转动轴线之间的夹角为90度。
14、进一步作为优选地,所述摇杆构件机构包括:与所述第一转接构件枢转连接的摇杆构件、一端与所述摇杆构件枢转连接而另一端与第一肢体构件枢转连接的第一连杆构件、相对两端分别与所述摇杆构件和所述第一肢体构件枢转连接的第二连杆构件;其中,所述摇杆构件、所述第一连杆构件、所述第二连杆构件和所述第一肢体构件彼此之间的枢转点形成平行四边形机构。
15、进一步作为优选地,所述第一连杆构件的轴向线和第二肢体构件的轴向线在转动的过程中始终保持相互平行。
16、进一步作为优选地,所述摇杆构件包括:用于与所述第一转接构件和第一连杆构件枢转连接的第一结构部、与所述第一结构部相连且用于与所述第二肢体构件和所述第二连杆构件枢转连接的第二结构部。
17、进一步作为优选地,所述第二肢体构件包括:对称设置于所述摇杆构件机构相对两侧的第一转动臂和第二转动臂;其中,所述第一转动臂和第二转动臂的相对两端均分别与所述动力机构和第一肢体构件转动连接;所述第一转动臂和第二转动臂均以与所述动力机构和第一肢体构件形成转动连接的转轴点构成的轴心线为对称轴对称设置。
18、进一步作为优选地,所述摇杆构件机构还包括;用于使得所述第一连接构件和所述第一肢体构件同轴连接的枢转构件;其中,所述枢转构件垂直于所述第一连接构件,且平行于所述第一肢体构件和第二肢体构件的枢转轴的轴线。
19、本申请还提供了一种机器人,包括:上述腿部结构。
20、与现有技术相比,本发明的有益效果主要体现在:机器人的腿部结构及机器人可以确保用于构成足部的肢体构件顺利实现前后翻转。
技术特征:
1.一种机器人的腿部结构,包括:用于构成足部的第一肢体构件;与所述第一肢体构件转动连接的第二肢体构件;其特征在于,包括:
2.如权利要求1所述的腿部结构,其特征在于,还包括:第三电机、用于固定所述第三电机且与所述第二肢体构件转动连接的固定座;其中,所述第三电机的驱动轴与所述第一电机的驱动轴和所述第二电机的驱动轴同轴输设置,并用于在所述第三电机的驱动轴转动时,带动所述固定座、所述第一肢体构件以及所述第二肢体构件作同步的侧向摆动。
3.如权利要求1所述的腿部结构,其特征在于,所述第一转接构件包括:用于连接所述第一电机的驱动轴的驱动部的第一连接轴件、相对两端分别与所述第一连接轴件和所述摇杆构件机构枢转连接的第一转动件;所述第一转动件包括:开设有第一轴承孔的第一端、开设有第二轴承孔的第二端、与所述第一端和所述第二端相连的折弯连杆;所述第二转接构件包括:用于连接所述第二电机的驱动轴的驱动部的第二连接轴件、相对两端分别与所述第二连接轴件和所述第二肢体构件枢转连接的第二转动件;其中,所述第二转动件包括:开设有第一轴套孔的第一端部、开设有第二轴套孔的第二端部、与所述第一端部和所述第二端部相连的折弯部。
4.如权利要求1所述的腿部结构,其特征在于,所述折弯连杆的折弯度数为90度;所述折弯部的度数为90度;第一电机的驱动轴的轴线和所述摇杆构件用于与第二肢体构件枢转连接的枢转轴的转动轴线之间的夹角为90度;第二电机的驱动轴的轴线与所述第二肢体构件的转动轴线之间的夹角为90度。
5.如权利要求1所述的腿部结构,其特征在于,所述第一转动件还包括:分别设置于对应的轴承孔内的轴承套,以及用于将所述轴承套封闭在对应的轴承孔内的端盖;其中,所述第一连接轴件的端部具有一倾斜设置且用于插入所述第一轴承套内的第一转轴头;所述摇杆构件机构的端部具有一倾斜设置且用于插入所述第二轴承套内的第二转轴头;所述转动件还包括:分别设置于对应的轴套孔内的轴套,以及用于将所述轴套封闭在对应的轴套孔内的盖体;所述第二连接轴件的端部具有一倾斜设置且用于插入第一轴套内的第一连接头;所述第二肢体构件的端部具有一倾斜设置且用于插入第二轴套内的第二连接头。
6.如权利要求1所述的腿部结构,其特征在于,所述摇杆构件机构包括:与所述第一转接构件枢转连接的摇杆构件、一端与所述摇杆构件枢转连接而另一端与第一肢体构件枢转连接的第一连杆构件、相对两端分别与所述摇杆构件和所述第一肢体构件枢转连接的第二连杆构件;
7.如权利要求1所述的腿部结构,其特征在于,所述摇杆构件包括:用于与所述第一转接构件和第一连杆构件枢转连接的第一结构部、与所述第一结构部相连且用于与所述第二肢体构件和所述第二连杆构件枢转连接的第二结构部。
8.如权利要求1所述的腿部结构,其特征在于,所述第二肢体构件包括:对称设置于所述摇杆构件机构相对两侧的第一转动臂和第二转动臂;其中,所述第一转动臂和第二转动臂的相对两端均分别与所述动力机构和第一肢体构件转动连接;所述第一转动臂和第二转动臂均以与所述动力机构和第一肢体构件形成转动连接的转轴点构成的轴心线为对称轴对称设置。
9.如权利要求8所述的腿部结构,其特征在于,所述摇杆构件机构还包括;用于使得所述第一连接构件和所述第一肢体构件同轴连接的枢转构件;其中,所述枢转构件垂直于所述第一连接构件,且平行于所述第一肢体构件和第二肢体构件的枢转轴的轴线。
10.一种机器人,其特征在于,包括:权利要求1至9中任意一项所述的腿部结构。
技术总结
本发明涉及一种机器人的腿部结构及机器人,该机器人的腿部结构主要是由用于构成足部的第一肢体构件、与所述第一肢体构件转动连接的第二肢体构件、设置于机器人的主体部上的动力机构,以及摇杆构件机构等构成。摇杆构件机构,一端与所述动力机构相连,另一端与所述第一肢体构件转动连接;其中,所述动力机构包括:同轴设置的第一电机和第二电机、用于连接所述第一电机的驱动轴和所述摇杆构件机构的第一转接构件,以及用于连接所述第二电机的驱动轴和所述第二肢体构件的第二转接构件。与现有技术相比,本申请提供的机器人的腿部结构及机器人,可以在不影响电机对腿部构件驱动的情况下,方便电机的位置布局,并提升电机的使用寿命。
技术研发人员:席庆兴,陈志军,陈先宝,高峰
受保护的技术使用者:上海智能制造功能平台有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!